
Fターム[5L096GA19]の内容
Fターム[5L096GA19]に分類される特許
1 - 20 / 864
画像特徴量抽出装置およびそのプログラム
画像識別情報付与プログラム及び画像識別情報付与装置
情報処理装置、情報処理方法、及び、プログラム
移動方向識別装置
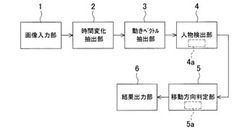
【課題】 検出した人物の移動方向を推定し、移動方向から監視対象外の人物に対する検出を棄却することで、監視効率を向上させる。
【解決手段】 時間軸上で連続する個々の画像を複数領域に分割して分割した領域毎に領域内の輝度変化を状態変化量として算出する時間変化抽出部2と、複数の連続画像で構成っされる画像フレーム群毎に算出した状態変化量の差分を算出して算出した差分の重心を算出し、更に連続する画像フレーム群の間で算出した重心位置を比較して重心の移動量を特徴量として算出する動きベクトル算出部3と、映像内の人物の存在を判断する人物検出部4と、人物の移動方向を判定する移動方向判定部5とを有し、移動方向判定部5はアダブーストによるカスケード型の強識別器によって構成され、サンプル記憶部5aに記憶された特徴量と算出した個々の領域の特徴量とを比較して人物の移動方向を判定する。
(もっと読む)
物体判別方法

【課題】判別基準を判別対象ごとに個別に考える必要がなく、またカメラの設置位置や設置角度に対する自由度の大きい物体判別方法を提供する。
【解決手段】ステレオカメラで撮影して得た画像から判別対象物の視差画像を生成し、判別対象物の視差画像の各地点における面の勾配を求め、該面の勾配の連なり状況から、視差画像における面の折れ目の位置とその折れ目の方向をその判別対象物の特徴情報として抽出し、抽出した特徴情報に基づいて、判別対象物の種類を判別する。
(もっと読む)
画像処理装置、及びその制御方法
【課題】画像に含まれる被写体の種類を高精度で判定可能な技術を提供する。
【解決手段】所定の被写体を含んだ画像を表す画像データを取得する取得手段と、前記画像に含まれる輪郭部分を表す輪郭信号を生成する生成手段と、前記画像を分割して得られる複数の分割領域それぞれについて、前記輪郭信号に基づいて代表輪郭方向を検出する検出手段であって、前記分割領域に含まれる輪郭部分全体の方向が所定度合い以上に特定方向に偏っている場合に、当該特定方向を前記代表輪郭方向として検出する前記検出手段と、前記検出された代表輪郭方向の方向別の度数分布、所定方向の代表輪郭方向が検出された前記分割領域が前記画像において当該所定方向に直交する方向に連続して並んでいる度合い、及び前記検出された代表輪郭方向の数のうちの少なくとも1つに基づき、前記被写体の種類を判定する判定手段と、前記被写体の種類に対応する補正方式に従って前記画像データを補正する補正手段と、を備えることを特徴とする画像処理装置を提供する。
(もっと読む)
物体検出装置
【課題】 撮像された映像における物体の検出精度を向上させることができる物体検出装置を提供する。
【解決手段】 画像入力部1が出力する映像を基に時間軸上で連続する画像で構成される画像フレーム群を生成し、個々の画像を複数領域に分割して分割した領域毎に領域内の輝度変化を状態変化量として算出する時間変化抽出部2と、生成した個々の画像フレーム群において、算出した状態変化量の連続する画像間の差分を移動領域として算出し、算出された移動領域の重心を連続する画像フレーム群の間で比較してその移動量を特徴量として算出する動きベクトル抽出部3と、算出した個々の領域の特徴量を用いて映像内の物体の存在をアダブーストによるカスケード型の識別器により判断する検出部3とを備えて撮像映像における物体の存在を判断する。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】人の下部領域(下半身)を通じて人を直接特定することで、人の特定効率および特定精度の向上を図る。
【解決手段】車外環境認識装置130は、検出領域内の画像を取得し、取得した画像において道路表面に相当する平面から予め定められた高さまでの領域にある複数のブロックを、ブロック同士の第1の相対関係に基づいてグループ化し、ブロック群を生成し、ブロック群を画像の水平方向に対して2分割し、2分割したブロック群同士の第2の相対関係に基づいて、ブロック群が人の候補である第1人候補であるか否か判定する。
(もっと読む)
画像信号処理装置
【課題】対象物の動き検出の誤判定を抑制する画像信号処理装置を提供する。
【解決手段】画像情報抽出部2が抽出した輝度平均値を参照し、現フレームの画像ブロックの輝度平均値と、現フレームの画像ブロックと同一地点に位置する参照フレームの画像ブロックの輝度平均値との差分が閾値以上であった場合に、現フレームの画像ブロックと参照フレームの画像ブロックとの間で輝度変化が発生したと判定すると共に、画像データの明るさの変化による輝度変化の変化量を差し引くためのオフセット値を算出するオフセット算出部3と、該オフセット値を考慮して、現フレームの画像ブロックの画素値と、現フレームの画像ブロックと同位置の参照フレームの画像ブロックの画素値との差分が閾値以上であるか判定を行い閾値以上であった場合に、当該画像ブロック内に動きを有する対象物が存在すると検出する動き検出判定部4とを備える。
(もっと読む)
色ヒストグラムに基づき画像領域を記述する方法およびシステム
【課題】色ヒストグラムに基づき画像領域を記述する方法とシステムを提供する。
【解決手段】色ヒストグラムに基づいて画像領域を記述する方法は次のステップを有する。量子化において特定色範囲と特定色範囲の外の色とを異なる方法で処理して、画像領域を量子化色領域に量子化する色量子化ステップ。量子化色領域に従い一つ以上の色ヒストグラムを計算する色ヒストグラム計算ステップ。一つ以上の色ヒストグラムを使用してユニークベクトルを生成するヒストグラムアセンブルステップ。
(もっと読む)
特徴量生成装置、方法及びプログラム
【課題】高い認識精度を維持しつつ特徴量の次元数を削減することができる特徴量生成装置、方法及びプログラムを提供する。
【解決手段】特徴量生成装置は、入力画像を分割し、分割された各部分領域から、例えば勾配方向をヒストグラム化した特徴量を抽出し、分割された部分領域を複数選択し、選択された部分領域を処理単位として、部分領域の位置に応じた重み付けを行い、特徴量を次元ごとに合算することにより特徴量の次元削除を行う。
(もっと読む)
画像ワープ方法及びそのコンピュータプログラム製品
【課題】画像ワープ方法及びそのコンピュータプログラム製品を提供する。
【解決手段】この画像ワープ方法は、元の視線角に対応する元の画像の複数の元の特徴点を決定するステップと、該元の画像内の該複数の元の特徴点の元の画素座標を計算するステップと、該複数の元の特徴点にそれぞれ対応する該元の画像の複数の新しい特徴点を決定するステップと、該元の画像上に射影された該複数の新しい特徴点の新しい画素座標を計算するステップと、該元の画像内の該元の特徴点の該元の画素座標をそれぞれ対応する該新しい特徴点の該新しい画素座標に近づけて、該元の画像を新しい視線角に対応する新しい画像に変形させるステップとを含む。
(もっと読む)
警告表示方法および警告表示プログラム
【課題】グルーピングの枠移動を精度よく予測し、より正確に危険物の存在を車両の運転者に警告する警告表示方法および警告表示プログラムを提供する。
【解決手段】警告表示方法は撮像した車両周囲の画像から特徴量を検出するステップと、検出した特徴量にもとづいて、同一の属性を持つ特徴量をグルーピングするステップと、グルーピングされた画像領域に含まれる物体画像の車両に対する危険度を示す信用度を設定するステップと、信用度が所定の高さ以上であると、運転者が視認可能な位置に設けられた表示装置に対して警告表示を行うステップと、グルーピングされた画像領域の次フレームにおける位置を、グルーピングされた画像領域を構成する画素の2フレーム前の画像と1フレーム前の画像間の動きベクトルの平均と1フレーム前の画像と現在のフレームの画像間の動きベクトルの平均とにもとづいて算出した加速度を用いて予測するステップとを有する。
(もっと読む)
動きベクトル算出装置
【課題】映像信号の動きベクトル算出のための演算量を著しく低減するとともに、固定小数点処理をし易くする。
【解決手段】動画像の画像ブロック毎の動きベクトルを算出するために、3次元で定義された一〜三番目の固有値λ1〜λ3のうち、固有値λ1,λ2は近似する静止画の固有値λ'1,λ'2を代用することで、2次固定方程式で求め、精度を必要とする固有値λ3は、通常の分散式で求めている。このように、3次固定方程式を用いることなく動きベクトルを求めることで、演算量を少なくして時間内の処理と動きベクトルの算出精度を向上させることが可能となる。
(もっと読む)
データストリームにブロック単位で予測符号化されたビデオフレームのブロックの顕著性値を決定する方法及び装置
【課題】計算コストの低い顕著性モデルを生成すること。
【解決手段】本発明の一態様は、データストリームにブロック単位で予測符号化されたビデオフレームのブロックの顕著性値を決定する方法であって、当該方法は、処理手段を用いて前記顕著性値を決定するため、前記ブロックの変換された残差の符号化コストを決定し、前記決定された符号化コストを利用することを有する方法に関する。
(もっと読む)
オプティカルフロー検出装置及び検出方法
【課題】本発明は、マッチング探索処理中に無効フローを除去し、マッチング探索処理の処理時間の短縮を図ることを目的としている。
【解決手段】このため、オプティカルフロー検出装置において、マッチングスコア算出手段とマッチングスコア差分算出手段とマッチングスコア差分判定手段とフロー内積算出手段とフロー内積評価手段とを備え、マッチング探索時、差分がしきい値以下の時に、フロー内積算出手段により内積値を算出し、フロー内積評価手段により無効フロ一を除去する。また、オプティカルフロー検出方法において、現在画像の画像データと過去画像の画像データから前回と今回のマッチングスコアの差分を算出し、マッチング探索時、差分がしきい値以下の場合に、前回までのオプティカルフローと今回のオプティカルフローで内積値を算出し、内積値でオプティカルフローの方向性を判定して無効フローを除去する。
(もっと読む)
画像解析方法、画像解析装置及びコンピュータプログラム
【課題】手動による指定を行うことなく、撮影された物体に応じて画像を複数の領域に分割する。
【解決手段】入力された画像の背景の構成を推定し、構成の推定結果に基づいて、画像を複数の第一領域に分割し、第一領域に対し、その領域に写っている物体に応じたラベルを付与し、第一領域を、当該第一領域に付与されたラベルに基づいて複数の第二領域に分割し、第二領域に対し、その領域に移っている物体に応じたラベルを付与する。
(もっと読む)
画像解析装置および画像評価装置
【課題】人物とその地点を代表するランドマークのようなオブジェクトとが被写体となるような撮影画像を解析してオブジェクトの位置を識別する。
【解決手段】オブジェクト探索領域抽出部303は、画像データから顔領域および胴体領域を除いてオブジェクト探索領域を抽出する。顕著領域候補抽出部304は、オブジェクト探索領域から複数の顕著領域候補を抽出する。独自色性算出部305は、オブジェクト探索領域の各画素の色情報を識別し、各色の独自色性を、その出現頻度および他の色との距離に基づいて定量的に算出する。存在確率算出部307は、オブジェクト領域の存在確率をブロック単位で算出する。オブジェクト領域識別部308は、各顕著領域候補の顕著領域としての尤度を算出し、最尤の顕著領域候補をオブジェクト領域に決定する。
(もっと読む)
情報処理装置、情報処理装置の制御方法、およびプログラム
【課題】画像の領域分割の処理時間を短縮させる技術を提供する。
【解決手段】画像に対して複数の局所領域を設定する設定部と、局所領域のそれぞれから特徴量を抽出する抽出部と、それぞれの特徴量に対するそれぞれの確率密度に基づいて、局所領域同士の非類似度を算出する算出部と、非類似度に基づいて複数の局所領域を領域群として統合する統合部と、を備える。
(もっと読む)
画像処理装置、積分画像作成方法及びプログラム
【課題】積分画像の格納に必要な記憶容量を削減できる画像処理装置、積分画像作成方法及びプログラムを提供することを課題とする。
【解決手段】画像処理装置であって、画像を分けたブロック単位で、ブロックに含まれる1個の座標の面積積分値、1個以上の座標の垂直積分値、水平積分値及び輝度値を格納した記憶手段と、ブロックに含まれる全ての座標の面積積分値を、記憶手段から読み出した1個の座標の面積積分値、1個以上の座標の垂直積分値、水平積分値及び輝度値により算出する制御手段とを有することにより上記課題を解決する。
(もっと読む)
1 - 20 / 864
[ Back to top ]