
Fターム[5L096GA43]の内容
Fターム[5L096GA43]に分類される特許
1 - 20 / 39
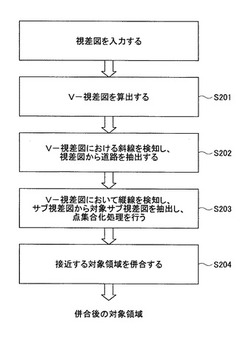
対象検知方法及び対象検知システム
【課題】本発明は、対象検知方法及び該方法が用いられる対象検知システムを提供する。
【解決手段】該方法は、同一シーンの深度図を撮像するとともに、撮像した深度図に基づいて該シーンの視差図を算出し、得られた視差図に基づいて前記シーンのV−視差図を取得し、V−視差図において道路に対応する斜線を検知するとともに、該斜線により視差図から道路を抽出することで、道路を含まないサブ視差図が得られ、V−視差図において縦線を検知し、前記サブ視差図から検知された各縦線に対応する全ての点を対象サブ視差図として抽出し、視差距離が所定値未満になり且つ重畳領域の比率が所定の閾値を超えた任意の対象サブ視差図同士の矩形フレームを1つの矩形フレーム対象領域に併合する。
(もっと読む)
ビデオ画像シーケンスにおいて移動物体を検出するための方法および装置

【課題】画像シーケンスにおいて移動物体を検出する方法を提供する。
【解決手段】a)画像シーケンスの一対の連続画像の一方の画像での特徴点を決定し、b)決定した特徴点を用いて、一対の画像の一方を、他方に投影する数学的変換を決定し、c)決定した変換により、互いへ変換される一対の画像の複数の画像の間の差として差分画像を決定し、d)決定した差分画像において特有の画像変化点を決定し、e)決定した特有の画像変化点から物点を決定するステップとを含む方法である。ステップd)は、d1)画像変化の閾値を確立し、閾値を超える画像変化点を、差分画像内のそれらの点として決定し、d2)所定の品質基準に基づいて、画像変化点の質を分析し、d3)品質基準が満たされている場合、d1)で決定した画像変化点をステップd)で決定する画像変化点として確立し、さもなければ、d1)で確立される閾値でd1)及びd2)を繰り返すステップを含む。
(もっと読む)
画像ワープ方法及びそのコンピュータプログラム製品
【課題】画像ワープ方法及びそのコンピュータプログラム製品を提供する。
【解決手段】この画像ワープ方法は、元の視線角に対応する元の画像の複数の元の特徴点を決定するステップと、該元の画像内の該複数の元の特徴点の元の画素座標を計算するステップと、該複数の元の特徴点にそれぞれ対応する該元の画像の複数の新しい特徴点を決定するステップと、該元の画像上に射影された該複数の新しい特徴点の新しい画素座標を計算するステップと、該元の画像内の該元の特徴点の該元の画素座標をそれぞれ対応する該新しい特徴点の該新しい画素座標に近づけて、該元の画像を新しい視線角に対応する新しい画像に変形させるステップとを含む。
(もっと読む)
画像処理装置、画像処理方法、および、プログラム
【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】取得される映像から、多項分布の背景モデルを生成し、背景を生成する生成部と、生成部により生成された背景モデルから、信頼度の高い背景が生成できるか否かを判断する判断部を備え、現画像において、生成される背景とは異なる部分の画像である動体が検出され、動体が、所定の一定時間以上停止しているかどうかが判定される。一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とが用いられて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度が求められる。求められた不動体信頼度に基づいて、現画像から、不動体が検出される。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
画像処理装置、積分画像作成方法及びプログラム
【課題】積分画像の格納に必要な記憶容量を削減できる画像処理装置、積分画像作成方法及びプログラムを提供することを課題とする。
【解決手段】画像処理装置であって、画像を分けたブロック単位で、ブロックに含まれる1個の座標の面積積分値、1個以上の座標の垂直積分値、水平積分値及び輝度値を格納した記憶手段と、ブロックに含まれる全ての座標の面積積分値を、記憶手段から読み出した1個の座標の面積積分値、1個以上の座標の垂直積分値、水平積分値及び輝度値により算出する制御手段とを有することにより上記課題を解決する。
(もっと読む)
領域抽出装置、撮像装置、及び領域抽出プログラム
【課題】撮像された画像から主要被写体の領域を抽出することができる領域抽出装置、撮像装置、及び領域抽出プログラムを提供する。
【解決手段】領域抽出装置140は、撮像された画像から画像特徴量に基づいて第1領域を抽出し、且つ、画像に定められた位置から画像特徴量に基づいて第2領域を抽出する領域抽出部142と、予め定められた条件を第1領域及び第2領域の少なくとも一方が満たすか否かを判定し、第1領域及び第2領域のうち、予め定められた条件を満たす第1領域及び第2領域を選択する判定部143と、判定部143が選択した第1領域及び第2領域の分布を記憶する記憶部145と、を備える。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】多様なパターンのジェスチャを認識することを課題とする。
【解決手段】画像処理装置10は、原画像からジェスチャを認識する対象を特徴付ける色を有する画素を抽出する。さらに、画像処理装置10は、原画像から先の色を有する画素が抽出されることによって得られた色画像のフレーム間で差分を抽出する。さらに、画像処理装置10は、色画像のフレーム間で差分が抽出された領域の大きさに基づいて、第1の方式および第2の方式のうち一方の方式を選択する。
(もっと読む)
画像処理システムおよび画像処理方法
【課題】ユーザが望むフレームの画像データを高精度に検出することができ、効率よく動画の観測、評価を行うことが可能な画像処理システムを提供する。
【解決手段】連続した複数フレームの画像データを記憶する画像データ記憶部203と、記憶された画像データを表示する表示部207と、表示された画像データにおいて注目領域を設定する注目領域設定部210と、設定された注目領域について、画像データ記憶部203に記憶された隣接するフレームの画像データを比較して、その変化量を検出する変化量検出部204と、検出された変化量が所定の閾値を超えたことを判定する変化判定部205と、変化判定部205によって所定の閾値を超えたと判定されたフレームの画像データをインデックスとして記憶するインデックス記憶部206とを備える画像処理システムを採用する。
(もっと読む)
画像特徴量抽出装置及びこれを用いた画像処理によるマーカ検出装置
【課題】画像中から閉曲線を抽出し、さらに閉出線に囲まれた内側部分の画像の輝度情報を抽出して整理し、画像特徴量を構成することにある。
【解決手段】画像中から閉曲線を抽出する閉曲線抽出部14と、閉曲線抽出部14により抽出された閉曲線に外接する最小矩形を計算する最小矩形抽出部15と、最小矩形抽出部15により計算された最小矩形から画像特徴量全体の回転方向を決定する回転方向決定部16と、閉曲線抽出部14により抽出された閉曲線に囲まれた内側部分の画像の輝度情報を抽出する輝度情報抽出部17と、閉曲線抽出部14、最小矩形抽出部15、回転方向決定部16及び輝度情報抽出部17により求められた閉曲線・回転方向・輝度情報を整理して画像特徴量を構成する画像特徴量構成部18と、を備えるので、対象物のサイズ変化・回転に影響を受け難い画像特徴量を抽出することができる。
(もっと読む)
画像識別装置、画像識別方法、画像識別プログラム及び記録媒体
【課題】ブロック画像の分類精度を向上させることができる画像識別装置を提供する。
【解決手段】ブロック画像を分離平面を用いてカテゴリに分類する画像識別装置1であって、対象画像を入力する対象画像入力部10と、ブロック画像を生成するブロック画像生成部11と、ブロック画像の特徴量を演算する特徴量演算部12と、ブロック画像がカテゴリに分類されるか否かを判別するカテゴリ判別部13とを備え、特徴量演算部12は、当該ブロック画像の局所的特徴量及び対象画像全体の全体特徴量を用いるとともに、ブロック画像の複数の特徴を座標軸とする第2特徴量空間において、複数の局所的特徴量を組み合わせてなる特徴量ベクトルの座標位置と、第2特徴量空間の一つ又は複数の任意の領域とを用いて、領域に属する特徴量ベクトルを有するブロック画像を領域ごとにカウントしたブロック画像の数を全体特徴量に含める。
(もっと読む)
画像識別装置、画像識別方法、画像識別プログラム及び記録媒体
【課題】対象画像を分割して得られるブロック画像の分類精度を向上させることができる画像識別装置を提供する。
【解決手段】予め設定されたカテゴリごとに予め学習済みの分離平面を用いて対象画像を分割して得られるブロック画像をカテゴリに分類する画像識別装置1であって、対象画像を入力する対象画像入力部10と、対象画像を複数のブロックに分割して複数のブロック画像を生成するブロック画像生成部11と、ブロック画像の特徴量を演算する特徴量演算部12と、特徴量空間におけるブロック画像の特徴量の大きさに対応する座標位置及び分離平面を用いて、ブロック画像がカテゴリに分類されるか否かを判別するカテゴリ判別部13と、を備え、特徴量演算部12は、ブロック画像の特徴量として、当該ブロック画像の画像情報から算出される局所的特徴量及び対象画像全体の画像情報から算出される全体特徴量を用いる。
(もっと読む)
車載カメラシステム
【課題】車室内外の環境条件によって車両の窓ガラスに生じる曇りを的確に判定可能な車載カメラシステムを提供する。
【解決手段】本発明に係る車載カメラシステム(1)は、車両の窓ガラス(2)に生じる曇りを検知するものであり、画像処理装置(6)は、窓ガラス(2)を介して車室外を撮像する撮像装置(3)で撮像した画像から窓ガラスに曇りが生じているか否かを判定し、曇りが生じていると判定された場合は、車室内温度センサ(4)及び車室外温度センサ(9)で計測した温度に基づいて窓ガラスのうち車室内外のいずれ側に曇りが生じているかを判定することを特徴とする。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、基材とは異なる光学反射特性を有する微細物質または特徴的な図案及び形状等を有する微細物質をランダムに配置しておく。また個々の物品をスキャナ等により光学的に読取り、所定の画像処理を施して微細物質の分布位置情報を抽出し、基準特徴点データとして記憶部102に記憶しておく。識別対象となる物品を上述の読取りの際と同様の手法で読取り、同様の画像処理を施して微細物質の分布位置情報(対象物特徴点データ)を抽出する。そして、抽出した対象物特徴点データと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
画像監視装置
【課題】監視空間内において顔を隠蔽している人物を不審者として判定する画像監視装置において、人物の後頭部等を顔隠蔽者と誤判定することを防止する。
【解決手段】画像監視装置1は、撮像部2にて取得された入力画像中から人物領域を抽出し、さらに人物領域周辺部から頭部候補領域を抽出する。そして抽出された頭部候補領域が顔隠蔽者か否か判定する際に、肌領域の重心位置が頭部候補領域の中心付近の所定領域内にある場合に、顔隠蔽者と判定する。
(もっと読む)
顔検出方法および顔検出装置、ならびに、プログラム
【課題】顔検出の検出結果に基づき対象人物が口を覆う用具を装着しているか否かを判定可能とする。
【解決手段】画像から顔を検出し、検出された顔から口の特徴点を抽出して口の縦幅および横幅を求め、口の縦幅および横幅と、口について予め求められた標準の縦幅および横幅との第1の差分および第2の差分をそれぞれ算出し、第1および第2の差分の絶対値を取った値に対して閾値判定を行う。第1の差分が第1の閾値Th1未満であり、且つ、第2の差分が第2の閾値Th2未満である場合に、口が覆われていないと判定する。また、第1の差分が第1の閾値Th1である場合において、第2の差分が第2の閾値Th2以下で、且つ、第3の閾値Th3を超える場合には、口を開けた状態が検出されたものと見做し、口が覆われていないと判定する。
(もっと読む)
画像処理装置、画像処理方法、プログラムおよび記録媒体
【課題】撮像手段により撮像された画像における輝度を背景の状況に応じて適切に補正することが可能な画像処理装置を提供する。
【解決手段】画像処理装置1は、入力輝度画像データを取得する輝度画像取得部11と、入力輝度画像データを低解像度化した低解像画像データを生成する低解像処理部12と、画像における背景のタイプを検知する背景タイプ検知部13と、検知された背景のタイプに基づいて、低解像画像データに対して、背景の領域を広げ、前景の領域を小さくするフィルタ処理を実行することにより生成されたフィルタ処理画像データを用いて、当該フィルタ処理画像データにおける画素座標と画素値との関係に近似する、画素座標を変数とする2次多項近似式を生成するパラメータ推定部15と、当該2次多項近似式で示される2次多項モデル画像データに基づいて、入力輝度画像データを補正する補正部17とを備える。
(もっと読む)
適応フィルタリングを利用したデジタルイメージ安定化方法
【課題】デジタルイメージ安定化を正確にすると同時に、カメラ動きまたは全体動きのために起こる動きの特徴点を識別して、その特徴点のモーションベクトルを得るビデオデータプロセッシング方法を提供する。
【解決手段】デジタルイメージ安定化方法は、最適の特徴点を選択するための特徴点分類アルゴリズム、選択された特徴点のモーションベクトルを誘導するための計算的に効率的なタイルベクトル基盤の階層的ブロック検索アルゴリズム、サイズ比率基準及びアングル差基準に基づいて選択された特徴点をグループ化する特徴点モーションベクトルグループ化/比較アルゴリズムからなる。
(もっと読む)
爪領域検出装置およびネイルアートシミュレータ
【課題】照明による影やハレーションに対する耐性が高く、指領域と爪領域を正確に分離できる爪領域検出方法および装置ならびにネイルアートシミュレータを提供する。
【解決手段】指領域分離部201は、手指の画像を指領域とその背景領域とに分離する。指軸検出部202は、指領域の対称軸を指軸として検出する。軸対称平滑化部203は、前記指軸を中心に軸対称の位置関係にある画素ペアの画素値を平滑化する。爪領域抽出部204は、軸対称で画素値を平滑化された指領域を、その輝度を代表できる画素値に基づいて爪領域と肌領域とに分離して爪領域を抽出する。ネイル画像重畳部205は、抽出された爪領域にネイルアート画像を重畳表示することでネイルアートをシミュレートする。
(もっと読む)
位置計測装置、位置計測方法及びマーカー
【課題】撮像画像における画素より小さな単位により画像中におけるマーカー位置を高精度に特定することを可能とする。
【解決手段】位置計測装置1では、マーカー画像が画像取得部10により取得され、二値化画像生成部11によりマーカー画像に基づき複数の異なる閾値ごとに二値化マーカー画像が生成され、マーカー重心座標算出部12により二値化マーカー画像におけるマーカーが捉えられた画素に基づきマーカー重心座標が算出されるので、当該二値化マーカー画像におけるマーカーの位置が特定される。また、1つのマーカーが捉えられたマーカー画像に基づき、画素の階調値に関する閾値を変えて複数の異なる二値化マーカー画像が生成され、複数の二値化マーカー画像ごとにマーカー重心座標が算出され、マーカー座標算出部13により複数のマーカー重心座標の重心の座標がマーカー座標として算出・出力される。
(もっと読む)
画像処理装置および画像処理方法
【課題】赤外線画像上の人物の表面温度と背景の温度とが接近している場合でも、人物を
確実に検出可能とする。
【解決手段】ある注目輝度を含んだ所定の輝度幅の輝度範囲で赤外線画像のコントラスト
を拡大する処理(コントラスト強調)を行い、コントラスト強調後の赤外線画像から人物
検出を行う。そして、ある注目輝度で人物の検出を行ったら、注目輝度を更新し、新たな
注目輝度を含む所定の輝度範囲でコントラスト強調を行い、強調後の画像から人物を検出
する。こうすれば、コントラスト強調によってその人物と背景との輝度差を十分に拡大す
ることができる。従って、人物の表面温度が背景の温度に接近している場合でも、背景か
ら人物を浮かび上がらせることが可能となり、赤外線画像に写った人物を確実に検出する
ことができる。
(もっと読む)
1 - 20 / 39
[ Back to top ]