
Fターム[5L096GA51]の内容
Fターム[5L096GA51]に分類される特許
1 - 20 / 1,156
物体検出装置、監視カメラ、及び物体検出方法
学習装置、学習方法およびプログラム
顔認証データベース管理方法、顔認証データベース管理装置及び顔認証データベース管理プログラム
画像認識装置、画像認識装置の制御方法、およびプログラム
被写体検出装置、被写体検出方法及びプログラム
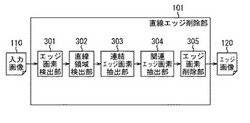
【課題】背景を含む画像から被写体の頭部領域を高精度に検出できるようにする。
【解決手段】検出したエッジ画素に基づいて、ハフ変換を用いて直線を表すパラメータρ、θを検出し、直線パラメータρ、θに基づいて、検出された複数のエッジ画素を含むように所定の幅wの直線領域を検出する。次に、全ての直線領域以外におけるエッジ画素の中から、直線領域と連結する連結エッジ画素を抽出し、注目する直線領域と連結する連結エッジ画素との交点の間の注目する直線領域内のエッジ画素を関連エッジ画素とする。そして、関連エッジ画素以外の直線領域上のエッジ画素を削除する。
(もっと読む)
対象物識別装置および対象物識別方法

【課題】画像データからより確実に移動対象物を検出し識別する。
【解決手段】画像データ取得部(100)にて対象物を撮影した画像データを規定のレートで順次取得し、画素間位置検出部(102)にて順次取得される複数の画像データ間の相対位置を検出し、候補領域抽出部(103)にて前記相対位置から前記複数の画像データ間の差分を検出しその差分を前記対象物の候補領域として1つもしくは複数抽出し、移動量検出部(104)にて前記複数の画像データにわたって前記候補領域の移動量を検出し、解像度向上部(105)にて前記移動量を基に前記候補領域の解像度を向上させる。一方、予め対象物のモデルパターンをモデル記憶部(107)に記憶しておき、対象物識別部(106)にて、解像度を向上させた候補領域と記憶されたモデルパターンとを比較して対象物を識別する。
(もっと読む)
対象物変化検出装置および対象物変化検出方法
【課題】車両周辺の対象物の変化を迅速かつ正確に検出できる対象物変化検出装置および対象物変化検出方法を提供することを課題とする。
【解決手段】本発明は、画像から対象物の属性を検出し、検出した対象物の属性内の当該対象物の種類を示す種類情報を取得し、取得した種類情報に基づいて対象物の変化検出に用いる変化検出用閾値を設定し、検出した対象物を含む画像から、設定した変化検出用閾値を用いて、対象物の変化を検出する。ここで、本発明は、検出した対象物の属性内の当該対象物の状態を示す状態情報を取得し、取得した種類情報および取得した状態情報に基づいて対象物の変化検出に用いる変化検出用閾値を設定する。
(もっと読む)
画像調整方法、画像調整装置及び画像調整プログラム
【課題】プレゼンテーション時の表示画像の視認性を向上させるのに有利な画像調整方法を提供する。
【解決手段】画像調整方法は、情報処理装置から画像データと、表示装置が表示する画像用の表示設定とを取得する取得工程(S702,S703)と、該表示設定を用いてプロファイルを作成し、作成したプロファイルを用いて表示装置から出力する画像の画像データに変換する変換工程(S704,S712)と、該画像データに含まれる第1コンポーネントと第2コンポーネントとの間の明度及び色度の差に関する視認性の評価値を演算する演算工程(S715)と、取得した視認性の評価値と、予め設定された基準値とを比較する比較工程(S716)と、比較工程で得られた比較結果が基準値を下回る場合に視認性が低いと判断し、明度または前記色度を変更することにより視認性を高める変更工程(S717)とを含む。
(もっと読む)
顔方向の検出方法および情報処理機器
【課題】顔の方向を検出してディスプレイを備えるコンピュータの電力を制御する。
【解決手段】カメラ・モジュールが撮像した画像データからディスプレイの正面方向に対する顔の方向を判断する(403)。斜め顔を検出したときは、ディスプレイのバックライトをオフにする(407)。入力デバイスからの入力がある間は、正面顔を検出しない場合であってもバックライトをオフにしない(421、423)。斜め顔(405)または非顔を検出してバックライトをオフにしても(407)、入力デバイスが操作されたとき(409)はバックライトをオンにする(431)。そのとき、一定時間以上連続して正面顔を認識しない限りディスプレイのオン状態を維持する(433)。バックライトがオフになってから正面顔を検出したときはバックライトを点灯する(411)。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】一部の同一被写体の位置が異なる場合でも、画像の類似判定の精度向上を図ることができる。
【解決手段】ペア画像取得部41は、判定を行う複数の画像であるペア画像を取得する。対応点探索部82は、ペア画像取得部41により取得された複数の画像のデータについて、類似する複数の画素領域を夫々特定する。ベクトル算出部83は、対応点探索部82により特定された画像領域同士の距離を夫々算出する。閾値設定部84は、ベクトル算出部83により夫々算出された距離に基づいて、閾値を設定する。類似画像判定部44は、ベクトル算出部83により夫々算出された距離のうち、閾値設定部84設定された閾値以下の距離に対応する画素領域同士に基づいて、ペア画像取得部41により取得された複数の画像のデータが類似するか否かを判定する。
(もっと読む)
対象検知方法及び対象検知システム
【課題】本発明は、対象検知方法及び該方法が用いられる対象検知システムを提供する。
【解決手段】該方法は、同一シーンの深度図を撮像するとともに、撮像した深度図に基づいて該シーンの視差図を算出し、得られた視差図に基づいて前記シーンのV−視差図を取得し、V−視差図において道路に対応する斜線を検知するとともに、該斜線により視差図から道路を抽出することで、道路を含まないサブ視差図が得られ、V−視差図において縦線を検知し、前記サブ視差図から検知された各縦線に対応する全ての点を対象サブ視差図として抽出し、視差距離が所定値未満になり且つ重畳領域の比率が所定の閾値を超えた任意の対象サブ視差図同士の矩形フレームを1つの矩形フレーム対象領域に併合する。
(もっと読む)
画像処理方法、装置及びプログラム
【課題】本発明は、様々な画質(明るさのばらつきが大きい、エッジが不鮮明、ノイズが多いなど)の画像において、目的のオブジェクトを高精度で検出することができる新規な方法を提供する。
【解決手段】目的のオブジェクトの検出対象となる1つの画像に対して、予め定義されたn個の閾値を順番に設定してn回の2値化処理を実行し、各2値画像における連結画素領域の特徴量が所定の条件を満たすか否かを判定する。その結果、各2値画像において、所定の条件を満たさない領域の画素値をゼロクリアしたのちにこれらをマージして結果画像を生成する。
(もっと読む)
マーカの検出および追跡装置
【課題】カメラからマーカまでの距離が近傍から遠方までの広範囲に変化した場合においても、画像処理によりマーカを検出し、そのマーカを追跡する装置を提供する。
【解決手段】マーカとしては、赤外光を反射する反射シート1を下地として、マーカ模様2a,2bを印刷した透明シート2を下地に貼り付けて構成するか、又は、マーカ模様の切り抜きを反射シート1に直接貼り付けて構成し、撮影部としては、マーカを撮影するカメラの前に赤外線透過フィルタを設置すると共にカメラの近傍に赤外線照明手段を設置してなり、演算処理部としては、近距離のときにはカメラにより撮影された入力画像の画像特徴量によりマーカを検出する画像特徴量方法と、遠距離においてはカメラにより撮影された入力画像の赤外光を基にマーカを追跡する赤外光方法とを切り替えて適用する演算処理を行う。
(もっと読む)
画像信号処理装置
【課題】対象物の動き検出の誤判定を抑制する画像信号処理装置を提供する。
【解決手段】画像情報抽出部2が抽出した輝度平均値を参照し、現フレームの画像ブロックの輝度平均値と、現フレームの画像ブロックと同一地点に位置する参照フレームの画像ブロックの輝度平均値との差分が閾値以上であった場合に、現フレームの画像ブロックと参照フレームの画像ブロックとの間で輝度変化が発生したと判定すると共に、画像データの明るさの変化による輝度変化の変化量を差し引くためのオフセット値を算出するオフセット算出部3と、該オフセット値を考慮して、現フレームの画像ブロックの画素値と、現フレームの画像ブロックと同位置の参照フレームの画像ブロックの画素値との差分が閾値以上であるか判定を行い閾値以上であった場合に、当該画像ブロック内に動きを有する対象物が存在すると検出する動き検出判定部4とを備える。
(もっと読む)
顔画像認証装置
【課題】表情、顔の向きの変動等により本人認証をしにくい状況でも本人受理を確保することができる顔画像認証装置を提供する。
【解決手段】認証候補人物特定手段326は、類似度算出手段325によって算出された類似度に基づいて前記複数の登録人物から認証候補人物を特定する。検出率算出手段327は、顔追跡手段322によって追跡された直近の複数の顔領域画像に対する類似度が最高となったフレームの割合である登録人物検出率を、認証候補人物について計算する。認証閾値決定手段328は、顔領域画像に含まれる顔が認証候補人物として特定された登録人物の顔であるか否かを認証するための基準である認証閾値を、登録人物検出率に応じて決定する。認証判定手段329は、類似度が認証閾値を超えた認証候補人物を監視領域内の人物の顔であると判定する。
(もっと読む)
ビデオ画像シーケンスにおいて移動物体を検出するための方法および装置
【課題】画像シーケンスにおいて移動物体を検出する方法を提供する。
【解決手段】a)画像シーケンスの一対の連続画像の一方の画像での特徴点を決定し、b)決定した特徴点を用いて、一対の画像の一方を、他方に投影する数学的変換を決定し、c)決定した変換により、互いへ変換される一対の画像の複数の画像の間の差として差分画像を決定し、d)決定した差分画像において特有の画像変化点を決定し、e)決定した特有の画像変化点から物点を決定するステップとを含む方法である。ステップd)は、d1)画像変化の閾値を確立し、閾値を超える画像変化点を、差分画像内のそれらの点として決定し、d2)所定の品質基準に基づいて、画像変化点の質を分析し、d3)品質基準が満たされている場合、d1)で決定した画像変化点をステップd)で決定する画像変化点として確立し、さもなければ、d1)で確立される閾値でd1)及びd2)を繰り返すステップを含む。
(もっと読む)
警告表示方法および警告表示プログラム
【課題】グルーピングの枠移動を精度よく予測し、より正確に危険物の存在を車両の運転者に警告する警告表示方法および警告表示プログラムを提供する。
【解決手段】警告表示方法は撮像した車両周囲の画像から特徴量を検出するステップと、検出した特徴量にもとづいて、同一の属性を持つ特徴量をグルーピングするステップと、グルーピングされた画像領域に含まれる物体画像の車両に対する危険度を示す信用度を設定するステップと、信用度が所定の高さ以上であると、運転者が視認可能な位置に設けられた表示装置に対して警告表示を行うステップと、グルーピングされた画像領域の次フレームにおける位置を、グルーピングされた画像領域を構成する画素の2フレーム前の画像と1フレーム前の画像間の動きベクトルの平均と1フレーム前の画像と現在のフレームの画像間の動きベクトルの平均とにもとづいて算出した加速度を用いて予測するステップとを有する。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 画像取り込みの際などに起きる画素のずれによって特徴点の位置がずれてしまった場合であっても、精度良く個体識別を行うことができる個体識別装置等を提供する。
【解決手段】 個体識別装置100は、抽出された特徴点群の中から特徴量算出点Aを1つ特定し(S201)、特徴量算出点Aを除いた特徴点群の中から、特徴量算出点Aから近い順に特徴点A1〜Anを特定する(S202)。次に、特徴量算出点Aから所定距離X以上離れた特徴点Ai〜Anの中で、特徴量算出点Aから最近傍の点を基準点Bとして特定し(S203)、特徴量算出点Aから所定距離X以上離れた特徴点Ai〜Anの中から、所定数j個の参照点C1〜Cjを特定する(S204)。そして、特徴量算出点A、基準点B、及び参照点C1〜Cjの3つの点を用いて、特徴量算出点ごとに特徴量を算出する。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】撮像された対象物に対応する商品の確定を簡便化して、より効率的に行うことが可能な情報処理装置及びプログラムを提供する。
【解決手段】実施形態の情報処理装置は、取込手段と、報知手段とを備える。取込手段は、撮像手段が撮像した画像を取り込む。報知手段は、前記撮像手段で撮像された物体の画像と、各商品の基準画像とがどの程度類似しているかを示す類似度が、前記撮像された商品を前記基準画像に対応する商品のうち一の商品として確定する条件を満たした場合に、前記撮像された商品が前記条件を満たした前記基準画像に対応する商品として確定されたことを報知する。
(もっと読む)
画像処理装置、画像処理方法
【課題】波長帯の異なる領域を抽出するための閾値を自動的に決定する。
【解決手段】高空から撮影した地理画像データにおける画素において、第1の波長帯の分光輝度値と、記第1の波長帯とは異なる第2の波長帯の分光輝度値と、に基づいて画素を識別するための正規化指標値を演算する正規化指標演算部と、各画素における前記正規化指標値と出現頻度との関係を求め、クラス内分散とクラス間分散の比である分離度が最大となる正規化指標値を判別分析法により求め、前記画素を識別するための閾値として決定する閾値決定部と、前記閾値と対応する正規化指標値に基づいて、前記第1及び第2の波長帯により区別される画像データの領域を抽出する領域抽出部と、を有することを特徴とする画像処理装置。
(もっと読む)
1 - 20 / 1,156
[ Back to top ]