
Fターム[5L096GA55]の内容
Fターム[5L096GA55]に分類される特許
1 - 20 / 559
シフト及び画像の小さな歪みの推定
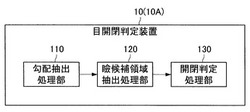
目開閉判定装置およびプログラム
【課題】人物の変化に対する耐性および環境の変化に対する耐性を有した目開閉状態の判定を行うことが可能な技術を提供する。また、複数のエッジ部分から瞼のエッジ部分を選択する困難さを伴わない目開閉状態の判定を行うことが可能な技術を提供する。
【解決手段】画像に存在する目の開閉状態を判定する目開閉判定装置10において、画像を構成する複数の画素の各々の濃度勾配方向を抽出する勾配抽出処理部110と、複数の画素の各々の濃度勾配方向に基づいて1または複数の瞼候補領域を抽出する瞼候補領域抽出処理部120と、1または複数の瞼候補領域に基づいて目の開閉状態を判定する開閉判定処理部130と、を備えることを特徴とする、目開閉判定装置10が提供される。
(もっと読む)
帳票認識方法および帳票認識装置

【課題】 文字や罫線の色が不定で、かつ文字色に濃淡や色の変動がある状況において、文字の画素のみを残し、その他の色の画素をドロップアウトする。
【解決手段】 入力された画像の画素を色クラスタリングして、クラスタ内の画素数から背景と文字の色を求める。画像中の色の分布から文字色の代表値を検出し、文字色の変動幅を考慮して文字色の画素を選択することにより、2値画像を生成する。また、文字の色以外の罫線などのノイズがある場合には、文字とノイズとを弁別して、ノイズをドロップアウトした文字の2値画像を生成する。2つのドロップアウト画像を用いて文字認識を行い、認識スコアが高い方を出力する。2つのドロップアウト方法による2値画像に対して文字認識することで、色むらがある場合と、罫線などのノイズがある場合の両方に対して、認識精度を向上することができる。
(もっと読む)
物体運動推定装置、物体運動推定方法及びプログラム
【課題】 従来のオプティカルフロー推定法と比較して、推定精度を向上させ、かつ、例えば照明変動などに対して頑健な物体運動推定装置等を提供する。また、運動物体の境界等も検出可能とする。
【解決手段】 物体運動推定装置(1)は、画像データの系列における物体の運動を表すオプティカルフローを、動的システムモデルに基づき推定する。この動的システムモデルの状態は、画像データの推定領域における各ピクセルの輝度、及び、各ピクセルの全部又は一部でのオプティカルフローである。輝度時間発展部(11)は、ある時刻の状態における輝度及びオプティカルフローから、新たな時刻の輝度を演算する。オプティカルフロー時間発展部(13)は、少なくとも、ある時刻の状態におけるオプティカルフローから、新たな時刻の状態におけるオプティカルフローを演算する。
(もっと読む)
画像処理方法およびシステム
【課題】2D被写体の検出と分離、カメラ姿勢推定、3D形状位置合わせおよび3D画像認識を含む画像処理における被写体の姿勢を推定する方法を提供する。
【解決手段】画像データを分析するための装置はプロセッサを含む。該プロセッサは、被写体の姿勢の複数の予測を得るために前記画像データを分析するよう構成され、前記予測は前記被写体の予測姿勢のインジケーションを含んでおり、前記予測姿勢は共通の座標系の位置、方向、スケールに関して表現され、2つの被写体姿勢間の距離を計算することで前記予測姿勢を比較することにより前記予測をグループ化するように構成され、前記距離は距離関数を用いて計算される。
(もっと読む)
パターン識別装置、方法及びプログラム
【課題】複数のメモリを使ってインテグラルイメージの読み出しを高速に行う方法が提案されているが読み出す局所領域の形状(幅、高さ)に制約を設ける必要があるため、検出精度に影響を与える場合がある。その場合、前記高速化手法で検出精度が低下し要求検出精度を満たせずに問題となる。
【解決手段】パターン識別に使用する複数の局所領域の中でインテグラルイメージの読み出しを高速化できる形状を持つ局所領域と前記形状制約を外して検出精度を重視できる形状を持つ局所領域とに分ける。そして、これらの割合を調整し、検出精度の低下を軽減させる。
(もっと読む)
画像処理装置および画像処理方法
【課題】画像と文字とが混在するコンテンツの画像データに対する画像処理を良好に行って画質向上を図る。
【解決手段】入力画像データに基づいて、画面が複数個のブロックに分割されて得られる各ブロックの帯域情報を得る。各ブロックの帯域情報に基づいて画面を複数種類の領域、例えば、画像領域、文字領域、画像と文字の混在領域に分離する。分離された画面領域毎に処理強度を求める。入力画像データに対して、分離された画面領域毎に、求められた処理強度で所定の画像処理、例えばシャープネス処理などを行う。画像領域と文字領域とで同一の処理強度で画像処理が行われることによる画質の低下を回避できる。
(もっと読む)
教師データの作成方法、教師データの作成のためのプログラム、及び教師データ作成装置
【課題】高精度な識別器を生成するための良好な教師データを作成する。
【解決手段】データ読み込み部130はデータを読み込み、教師データ作成部112及びGUI制御部116を介して出力装置150に出力する。ユーザはクラス設定部120を用いて、データに対する第1のクラスを入力する。推薦クラス生成部114は、第1のクラスに対して、類似/共起/関連データベースとユーザデータベースとに基づいて第2のクラスを生成する。第2のクラスは、GUI制御部116を介して出力装置150に出力される。ユーザは、入力装置160から第2のクラスに対する評価を入力する。ユーザデータベース更新部118は、この評価を取得し、それに基づいてユーザデータベース144を更新する。教師データ作成部112は、この評価を考慮した第2のクラスと、第1のクラスとを読み込んだデータと関連付けて、教師データを作成する。
(もっと読む)
画像分類方法
【課題】形容詞によって画像を分類する画像分類方法を提供する。
【解決手段】少なくとも2つの色面に関する画像の2次元分布関数の各々を入力する分布関数入力ステップと、2次元展開係数によって2つの分布関数の各々を記述する記述ステップと、2次元展開係数の各々を12通りの一次元配列の展開係数に並び替える並び替えステップと、対称積で表される2次形式の要素を12×12通りの並び替えの方向組み合わせについてそれぞれ生成する要素生成ステップと、生成された144通りの2次形式の要素の各々について、一定の量子数の差を持った全ての要素の和をとった物理量を、複数の量子数の差に対して生成する物理量生成ステップと、生成された各々の物理量の少なくとも1つに基づき、画像の2次元分布関数の形状の特徴を評価する評価ステップと、評価結果に基づいて画像を少なくとも2つの範疇の画像に分類する分類ステップとを備える。
(もっと読む)
ガボールフィルターをブロックガボールフィルターとして近似する方法、及び、プロセッサ上で実行されているアプリケーションプログラムによるアクセスのためのデータ構造を格納するメモリ
【課題】高速に算出でき、メモリ効率がよく、また優れた正確度を維持する画像記述子の算出手段を提供する。
【解決手段】ガボールフィルタがブロックガボールフィルタとして近似される。ガボールフィルタは数字のマトリックスによって表され、各数字は連続ガボール関数から導出されたサンプルである。ブロックガボールフィルタはブロックのセットに分割される。ガボールフィルタに基づき任意の特定のブロック内の全てのピクセルに同一のフィルタ値が割り当てられる。次に、ブロックガボールフィルタのセットを用いて画像をフィルタリングし、フィルタリングされた画像のセットを得ることにより、画像から特徴を抽出する。フィルタリングされた画像はピクセルの領域に分割され、ピクセルごとにNビットシグネチャが求められる。各領域内のピクセルのNビットシグネチャのヒストグラムが結合され、特徴を形成する。複数の画像の特徴を顔認識に用いることができる。
(もっと読む)
輪郭抽出装置、輪郭抽出方法、及び、コンピュータプログラム
【課題】 被写体が比較的遠距離に位置する場合であっても、被写体の輪郭を簡易に抽出できる輪郭抽出装置を提供する。
【解決手段】 ステップS51にて、CPU3は、現在画像と前回画像との間の差分画像の各画素について、画素値の絶対値が一定値以上の画素のスコアに、一定ポイントを加算して、スコアを更新する。ステップS53にて、CPU3は、差分画像の各画素のスコアを、新たな画素値(頻度画素値)として、平滑化及び減衰処理を実行する。ステップS55にて、CPU3は、平滑化及び減衰処理後の頻度画素値が1ポイント以上の(0でない)範囲を有効領域VAに設定する。有効領域VAは、動いた部分及びその周辺部分であり、動いた部分を漠然と抽出し、これに基づき、輪郭を抽出する。
(もっと読む)
パターン位置検出方法
【課題】簡便な画像処理によって部品の位置検出時間を短縮する。
【解決手段】モデル画像取得工程と、取得したモデル画像を特定のパターンを含む複数の基準画像に分割する基準画像生成工程と、検出対象物の画像を取得する検出画像取得工程と、検出画像の上の複数の所定位置に各基準画像の各原点を合わせる原点あわせ工程と、各基準画像の各原点を検出画像の上の複数の所定位置からXY方向にずらしながら検出画像の中の各基準画像に対応する各領域にある各検出画像部分と各基準画像とを順次対比し、各相関値を順次取得する対比工程と、それぞれの対比位置における各相関値を統合XY面内で統合して統合相関値を生成する統合工程と、統合した統合相関値のピークの統合XY座標値を検出対象物の各所定位置からXY面内での各基準画像に含まれる各特定のパターンの位置のズレと認識する位置ズレ認識工程と、を含むことを特徴とする。
(もっと読む)
画像からテキスト筆画画像を抽出する方法及び装置
【課題】画像からテキスト筆画画像を抽出する方法及び装置を提供する。
【解決手段】本発明の1態様によれば、画像からテキスト筆画画像を抽出する方法は、画像のエッジ情報と勾配情報を取得し、取得されたエッジ情報と勾配情報に予め設けられた強調処理を行うことにより、画像においてテキストに関するエッジ情報と勾配情報を強調し、強調されたエッジ情報と勾配情報に対応するテキスト筆画画像を取得することを含む。
(もっと読む)
情報処理装置および方法、記録媒体、並びにプログラム
【課題】識別精度を向上できるようにする。
【解決手段】統計量抽出部は、第1の識別対象の複数の画像群の全体と第2の識別対象の複数の画像群の全体の類似度を算出するとともに、類似度から類以度統計量を抽出する。識別部は、類以度統計量から、第1の識別対象と第2の識別対象が同一であるかを識別する。本技術は、例えばパーソナルコンピュータに適用できる。
(もっと読む)
画像特徴量抽出装置及びこれを用いた画像処理によるマーカ検出装置
【課題】画像中から閉曲線を抽出し、さらに閉出線に囲まれた内側部分の画像の輝度情報を抽出して整理し、画像特徴量を構成することにある。
【解決手段】画像中から閉曲線を抽出する閉曲線抽出部14と、閉曲線抽出部14により抽出された閉曲線に外接する最小矩形を計算する最小矩形抽出部15と、最小矩形抽出部15により計算された最小矩形から画像特徴量全体の回転方向を決定する回転方向決定部16と、閉曲線抽出部14により抽出された閉曲線に囲まれた内側部分の画像の輝度情報を抽出する輝度情報抽出部17と、閉曲線抽出部14、最小矩形抽出部15、回転方向決定部16及び輝度情報抽出部17により求められた閉曲線・回転方向・輝度情報を整理して画像特徴量を構成する画像特徴量構成部18と、を備えるので、対象物のサイズ変化・回転に影響を受け難い画像特徴量を抽出することができる。
(もっと読む)
特徴点位置決定装置、特徴点位置決定方法及びプログラム
【課題】処理高速化等のために検出された特徴点位置候補の精度が低い場合であっても妥当な特徴点位置補正を実現し、所望の特徴点位置を決定できるようにする。
【解決手段】画像データから複数の特徴点の位置を決定する特徴点位置決定装置であって、特徴点の候補位置を求める特徴点位置候補決定手段と、前記特徴点位置候補決定手段で得られた特徴点位置候補の信頼度を判定する信頼度判定手段と、前記特徴点位置候補決定手段の結果を所定の補正条件に基づいて補正する特徴点位置補正手段を有し、前記信頼度判定手段の結果に基づいて前記補正条件を決定することを特徴とする。
(もっと読む)
入力画像における歪を検出する方法、入力画像における歪を検出する装置およびコンピューター読み取り可能な媒体
【課題】書物などのスキャン画像は背に近い所に歪みを有する。歪みを検出し、補正する方法を提供する。
【解決手段】特徴画像を用いてスキャンされた本の画像を分割化しページ領域に対応するピクセルをマップしページオブジェクトを作成してページの縁を検出する。ページオブジェクトの2つの間にある無地の背景領域を見つけ、ページ縁を分析してその形状を検出し、形状を分析して本の背の終端点を検出することにより本の背領域が検出される。ページ縁を用いて特徴画像を調べ、ピクセル値の上から下および下から上の下降勾配を検出し元のスキャンされた画像における影歪みの角を判定する。締め付けおよび湾曲歪みも検出される。ベジェ曲線を用いてページ上で検出された3つの歪みの各々をモデル化する。検出された歪みはまず台形の補正領域を定義することにより補正される。強度、締め付け、および湾曲補正が次に台形の補正領域内の線に沿って適用される。
(もっと読む)
情報処理装置、情報処理方法、及び、プログラム
【課題】入力画像に、所定の対象物が映っているか否かの判別の判別性能の低下を、容易に防止する。
【解決手段】補正部は、入力画像から抽出された特徴量を入力として、入力画像に所定の対象物が映っているか否かを表す弱仮説を出力する複数の弱識別器を有するアンサンブル識別器のパラメータを、補正情報を用いて補正する。判別処理部は、パラメータの補正後のアンサンブル識別器を用い、特徴量に対して、弱識別器が出力する弱仮説を積算し、その弱仮説の積算値に基づいて、入力画像に、対象物が映っているか否かを判別する。補正情報は、補正情報算出部54において、対象物を照明する光源に基づいて算出される。本技術は、例えば、入力画像に対象物が映っているか否かを判別する場合等に適用できる。
(もっと読む)
画像の照明検出
【課題】画像における照明を分割するための方法を提供する。
【解決手段】好ましくは2個又は3個であるm個の光源を有する画像は、例えばフィルタ処理済の画像とフィルタ未処理の画像とである相異なるフィルタリングを有するペアをなす画像を取得し、事前に計算されたm個のマッピングからなる集合をピクセルレベル又は領域レベルで画像ペアに適用し、最適なものを選択することによって、それぞれがm個の光源の1つのみによって照らされる相異なる領域に分割される。画像の情報のレンダリングはそれに従って調整されてもよい。
(もっと読む)
状態追跡装置、方法、及びプログラム
【課題】局所最適解に陥ることを防止して、追跡対象の状態を追跡する。
【解決手段】類似性データ記憶部34に、観測空間におけるパーティクルの類似性を定めた類似性データを記憶しておく。事後確率分布推定部26で、前時刻に事前確率分布予測部28で予測された事前確率分布と、観測取得部24で実際に取得された観測とに基づいて、追跡対象の状態の事後確率分布を推定し、事前確率分布予測部28で、事後確率分布推定部26で推定された事後確率分布に従ってサンプリングされた現在のパーティクル、及び類似性データに基づいて、現在のパーティクルと観測空間において類似するパーティクルを用いて、次時刻の追跡対象の状態の事前確率分布を予測する。
(もっと読む)
1 - 20 / 559
[ Back to top ]