
Fターム[5L096HA04]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 移動体の抽出 (1,816) | 移動ベクトル (1,211)
Fターム[5L096HA04]に分類される特許
201 - 220 / 1,211
画像処理装置
【課題】本発明は撮像手段により撮像して得られた撮像対象の動画像におけるフレーム画像を取得し、取得されたフレーム画像間での前記撮像対象の濃度の動きをベクトルで表現するオプティカルフローを算出する画像処理装置を提供する。
【解決手段】本発明の画像処理装置は、前記フレーム画像における前記撮像対象のエッジを抽出し、該エッジを構成する所定点でのオプティカルフローを算出し、算出された所定点でのオプティカルフローから該所定点の奥行きを算出し、前記所定点での奥行きにFOEのY座標からの距離に応じて変化する変数を乗算して補正奥行きを算出し、前記補正奥行きから所定点における三次元情報を復元する。
(もっと読む)
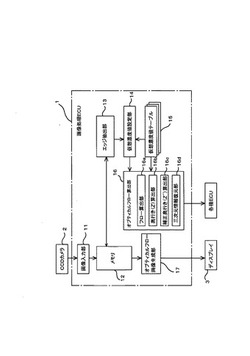
ナビゲーション装置

【課題】本発明はナビゲーション装置に関するもので、利便性を高めることを目的とするものである。
【解決手段】本発明は、本体ケース4にカメラ5を設けるとともに、このカメラ5には、フレームメモリー9を接続し、このフレームメモリー9には動きベクトル抽出部10を接続し、この動きベクトル抽出部10にはヒストグラム解析部11を接続し、このヒストグラム解析部11には速度成分検出部12を接続し、この速度成分検出部12には前記制御部6を接続した。
(もっと読む)
ジェスチャ・コマンド処理装置、ジェスチャ・コマンド処理方法、およびプログラム
【課題】コマンドに対応付けて記憶されていない新規なジェスチャが入力された場合でも、当該ジェスチャに新たにコマンドを割り当てて記憶させることができる。
【解決手段】ジェスチャと当該ジェスチャにより実行されるコマンドとを対応付けて記憶するジェスチャ・コマンド記憶部210と、ユーザーにより入力されるジェスチャを特定する入力ジェスチャ特定部220と、入力されるジェスチャに対応するコマンドをジェスチャ・コマンド記憶部210から読み出して実行するコマンド実行部230と、入力されるジェスチャがジェスチャ・コマンド記憶部210に記憶されていない新規ジェスチャである場合に、新規ジェスチャの入力情報を当該新規ジェスチャに対応付けて記憶する新規ジェスチャ記憶部240と、入力情報が所定のコマンド割当条件を満たした新規ジェスチャに対して、コマンドを対応付けてジェスチャ・コマンド記憶部210に記憶させるジェスチャ・コマンド割当部250と、を備えることを特徴とするジェスチャ・コマンド処理装置200を提供する。
(もっと読む)
動画像符号化装置及び動きベクトル検出方法
【課題】画質の劣化を抑制しつつ、動きベクトル検出における演算量を削減する。
【解決手段】縮小動きベクトル検出部12が、符号化対象の画像を縮小した縮小画像を用いて第1の動きベクトルの検出を行い、動きベクトル判定部13が、検出された第1の動きベクトルの確からしさを判定し、予測方向選択部14が、確からしさの判定結果をもとに、正しいと判定された第1の動きベクトルの予測方向を選択し、動きベクトル検出部15が、元の画像において、選択された予測方向で第2の動きベクトル検出を行う。
(もっと読む)
撮像装置及び画像処理方法
【課題】特徴点の追跡を行うことによって、時系列的に連続した複数の画像データのそれぞれに写った共通の被写体の動きを判断する撮像装置において、被写体の動きが速く、対応点を求めることができない場合でも被写体の動きを判断できるようにする。
【解決手段】撮像装置としてのデジタルカメラのCPUは、2枚目以降のフレームの画像データが取得されると、その画像データに対する特徴点追跡処理の実行を特徴点追跡部に指示する。特徴点追跡部は、1つ前のフレームの画像データから抽出された各特徴点のそれぞれに対応した対応点を求め、それらの各対応点を示す対応点情報をCPUに入力する。CPUは、入力された対応点情報を基に、特徴点追跡部で対応点が求められた追跡可能な特徴点の数が所定値以下か否かを判定する。そして、所定値以下である場合に、被写体の動きが速いと判断し、CCDのシャッタ速度を速くする。
(もっと読む)
撮像装置
【課題】太陽光が直接照射される地表付近や海上付近において、遠距離被写体の撮像位置が短時間に不規則に変化することを補正する撮像装置を提供する。
【解決手段】水平走査に同期した水平走査より短い時間、LEDまたはLDを用いた光源から出力された所定の波長帯の光を目標物体に照射し、照射された所定の波長帯の光による目標物体からの反射光を、画面一斉の水平走査に同期した電子シャッタ露光で撮像し、撮像された映像について、前記近赤外光の画面の輪郭成分と可視光画面の輪郭成分との相関を検出し、画面各部の往復分と片道分の差から片道分の地表大気の揺らぎ成分の移動ベクトルを検出し、可視光映像の画面各部ごとに片道分の地表大気の揺らぎの移動ベクトルを補正する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理用コンピュータプログラム
【課題】動画像データに含まれる画像に重畳されたノイズを除去するとともに、画像内でのボケ度合いを均一化可能な画像処理装置を提供する。
【解決手段】画像処理装置1は、動画像データに含まれる第1の画像と少なくとも1枚の第2の画像との間で、第1の画像上の第1の画素についての動きベクトルを求め、動きベクトルを用いて少なくとも1枚の動き補償画像を作成し、第1の画像及び動き補償画像における、第1の画素に対応する画素の値のグループに対して時間フィルタ処理を行うことで第3の画像を作成し、そのグループに含まれる画素値のバラツキ度を算出し、バラツキ度が高いほど強くなるようにエッジ強調度を設定し、設定されたエッジ強調度に従って第3の画像における第1の画素に対応する画素のエッジを強調する。
(もっと読む)
動きベクトル検出方法、及び動きベクトル検出プログラム
【課題】動画圧縮処理等に用いるため、ブロックマッチング法を用いて時間的に近接するフレーム間で動きベクトルを検出するに際して、探索のための計算量を削減しながら、視覚的画像劣化が少ない画像符号化のための動きベクトルを検出することができる動きベクトル検出方法、及び動きベクトル検出プログラムを提供する。
【解決手段】光学特性としての画像解像度の方向成分に応じて画像を領域分割し、それぞれの領域でその光学特性の画像解像度方向成分に応じた探索法を設定する。
(もっと読む)
動きベクトル計測装置および方法
【課題】少ない演算量により高精度に動きベクトルを計測する。
【解決手段】動きベクトル分布算出部41が、対象フレーム上における動きベクトル計測の対象となる対象画素について、過去フレームを対象フレームに対して所定画素ずらしつつ、対象画素と対象画素に対応する過去フレームの対応画素との相関を表すスコアを算出することにより、所定画素の数により定められる動きベクトル検出空間における動きベクトル分布を算出する。動きベクトル検出部43が、動きベクトル分布についての、動きベクトル検出空間の中心位置のスコアと、中心位置以外の他の位置のスコアとの差分に基づいて、対象画素における動きベクトルを検出する。誤計測判定部44が、動きベクトル分布に基づいて、動きベクトルが誤計測であるか否かを判定する。
(もっと読む)
撮像装置、撮像処理方法及びプログラム
【課題】被写体領域の切り抜きの失敗を防止する。
【解決手段】撮像装置100であって、背景内に被写体が存する被写体存在画像を撮像する電子撮像部2と、被写体存在画像に背景画像(例えば、被写体非存在画像)の色とは異なる色の画素でほぼ囲まれた閉領域が存するか否か、及び閉領域の中に、当該背景画像の色と略同色の同色領域が存するか否かを判定する画像領域判定部8dと、閉領域内に同色領域が存すると判定された場合に、当該同色領域が存する旨を報知する表示部10と、を備えている。
(もっと読む)
監視カメラ端末
【課題】他の監視カメラ端末との間で、追跡している人物の同定精度を十分に確保し、且つ、コストアップも十分に抑えられる監視カメラ端末を提供する。
【解決手段】隣接する2つの監視カメラ端末1は、撮像エリアの一部が重複している。監視カメラ端末1は、自端末で撮像したフレーム画像における人物の位置、および隣接する他の監視カメラ端末1で撮像したフレーム画像における人物の位置を、それぞれ共通の座標系の位置に変換する。そして、人物間の足元位置の距離により、重複エリアに位置する人物X、Yを1対1で対応付ける同定を行う。また、人物の足元が撮像されていないときには、その人物について、性別や年齢等の属性を用いて推定した推定身長を用いて、足元の位置を推定する。
(もっと読む)
サーバ装置、移動領域検出方法及びプログラム
【課題】移動領域を精度良く検出するサーバ装置、移動領域検出方法及びプログラムを提供する。
【解決手段】第1のフレームと第2のフレームの2つのフレームを比較することにより、当該2つのフレームの何れにも存在する画像領域であってフレーム上での位置が移動している領域である移動領域の移動の大きさと方向を示す移動ベクトルを検出する移動ベクトル検出手段と、移動領域を検出するために用いる領域である比較領域として、移動ベクトルに基づいて、2つのフレームそれぞれの比較領域を決定する比較領域決定手段と、2つのフレームの比較領域同士の比較と、第1のフレームの比較領域と当該比較領域に対応する第2のフレームの領域との比較と、を行うことにより、移動領域を決定する移動領域決定手段と、を有する。
(もっと読む)
動きベクトル計測装置および方法
【課題】フレーム内に移動速度が異なる物体が含まれている場合であっても、精度よく動きベクトルを検出する。
【解決手段】連続する複数フレームにおける対象フレームFrtと、対象フレームから所定フレーム間隔離れた過去フレームFrt−iとに基づいて、対象フレームFrt上の対象画素位置での動きベクトルを計測する。この際、間隔パラメータ設定部4が、対象フレームFrt上における領域毎または画素毎に、動きベクトルを計測する際の対象フレームFrtと過去フレームFrt−iとの間隔を表す間隔パラメータを設定する。具体的には、移動速度が大きい物体に対応する領域または画素ほど、フレーム間隔が小さくなるように間隔パラメータを設定する。動きベクトル計測部5が、間隔パラメータにしたがって、動きベクトルを計測する。
(もっと読む)
ジェスチャ認識装置、ジェスチャ認識装置の制御方法、および、制御プログラム
【課題】特殊な手段を用いず、ユーザにとって自然な操作かつ装置にとって低負荷処理で、ジェスチャの開始と終了とをジェスチャ認識装置に正しく認識させる。
【解決手段】動画に写る認識対象物の動作からジェスチャを認識する、本発明のジェスチャ認識装置100は、動画に写る特定の特徴を有する特定被写体(掌など)を検出する重心追跡部11と、特定被写体の単位時間あたりの移動速度を算出する移動速度判定部12と、特定被写体の移動パターンを抽出する移動パターン抽出部13と、移動速度と移動パターンとが予め定められた条件を満たす場合に、特定被写体の動きを、自装置に対して入力された指示(ジェスチャ認識処理の開始または終了の指示など)として識別する開始終了判断部14とを備えていることを特徴としている。
(もっと読む)
感情推定装置および感情推定方法
【課題】人間のコミュニケーションの場の感情であるグループ感情を推定することが可能な感情推定装置を提供する。
【解決手段】複数人で構成される集団の感情を示すグループ感情を推定する感情推定装置であって、状態遷移モデルを記憶する記憶部と、集団を構成する個人の感情に関する情報をセンシングにより取得し、個人感情を推定する情報入力部と、情報入力部から取得した個人感情の情報と状態遷移モデルとからグループ感情を推定するグループ感情推定部とを有し、状態遷移モデルは、個人感情とグループ感情の時系列遷移を扱うものであり、連続的にそのモデルの状態が更新されるものである。
(もっと読む)
画像処理装置、画像処理方法、および画像処理プログラム
【課題】二次元直行変換の演算量を削減すること。
【解決手段】画像処理装置は、第2の予測ブロック内で第1の予測ブロックに重複していない画素に関する第1の画素値行列(Bc_l)と第1の予測ブロック内で第2の予測ブロックに重複していない画素に関する第2の画素値行列(Bp_l)との差分を算出する。そして、算出された差分値行列を直交変換の対象行列とし、画像処理装置は、差分値行列に対して直交変換行列を用いて第1の直交変換と第2の直交変換とを施す。画像処理装置は、第1および第2の直交変換後の変換係数行列を、第1の予測ブロックに関する第1の変換係数行列を用いて補完することで第2のブロックに関する第2の変換係数行列を算出する。
(もっと読む)
動作認識装置
【課題】背景、人の服装もしくは照明などの認識環境の変化、または、オクルージョンの発生に対してロバストな動作認識が可能な動作認識装置を提供する。
【解決手段】人体の各部位についての幾何学的構造による拘束条件と人体の複数の部位の共起動作に関する共起状態遷移パターンおよび共起タイミング構造パターンを含む共起動作モデルとを記憶する記憶部と、連続して入力される複数の画像データに基づいて、拘束条件にしたがって特定される、人体の各部位に対応する部位領域毎に、部位領域の移動方向を示す領域代表動きベクトルを算出する領域代表動きベクトル算出部と、複数の領域代表動きベクトルによる動作軌跡から、記憶部に格納された共起動作モデルに基づいて共起動作を認識する動作認識部とを有する。
(もっと読む)
画像揺れ補正装置
【課題】信頼度の高い画像全体の動きベクトルに基づいて、画像全体の揺れを補正する。
【解決手段】画像揺れ補正装置は、画像内の複数の領域の動きベクトルをそれぞれ検出する領域ベクトル検出部(102)と、複数の領域の動きベクトルのそれぞれの信頼度を判定する信頼度判定部(103)と、信頼度が低いと判定された動きベクトルが検出された領域に代えて新たな検出対象領域を領域ベクトル検出部に指示する領域指示部(105)と、信頼度が高いと判定された動きベクトルから画像全体の動きベクトルを算出する画像ベクトル算出部(106)と、画像全体の動きベクトルに応じて出力すべき画像全体を移動させて画像の揺れを補正する揺れ補正部(107)とを備えている。
(もっと読む)
動画像処理プログラム、及び動画像処理装置
【課題】現フレームで特徴部を認識できなくても、その特徴部の領域(位置)を確定しやすくする。
【解決手段】映像信号を処理してフレーム画像の特徴部(二次元バーコード)の領域を認識する動画像処理装置であって、前記映像信号のフレーム間の動きベクトルを画素毎に取得する動きベクトル取得部(動き探索部11)と、最も数が多い前記動きベクトルが略ゼロベクトルである場合に、前記特徴部の領域に対応する前記動きベクトルの所定数以上が略ゼロベクトルである過去のフレームを用いて、現フレームにおける前記特徴部の領域を認識する認識部12とを備える。
(もっと読む)
車両周辺監視装置
【課題】ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる機能を備えた車両周辺監視装置を提供する。
【解決手段】今回の制御周期における撮像画像と前回の制御周期における撮像画像間の位相相関関数を求めて、該位相相関関数を逆フーリエ変換した関数において実部の大きさが最大となる複素数要素の位置に基づいて、今回の制御周期での撮像画像の前回の制御周期での撮像画像からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値PYを算出するピッチング補正値算出部12と、今回の撮像画像に対して、ピッチング補正値PYによる位置補正を行った補正画像f3を生成する補正画像生成部13と、補正画像f3から対象物を検出する対象物検出部14とを備える。
(もっと読む)
201 - 220 / 1,211
[ Back to top ]