
Fターム[5L096HA04]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 移動体の抽出 (1,816) | 移動ベクトル (1,211)
Fターム[5L096HA04]に分類される特許
1,201 - 1,211 / 1,211
局所的に変形する可能性のある動きを分析するための装置および方法
本発明は、局所的に変形可能な動きを分析するための方法、およびある対象物体の局所的な動きをその全体運動から分離して対象物体の動きを精確に追従するための方法および装置に関する。対象物体はイメージシーケンスとして観察される。この場合、対象物体領域イメージと背景イメージ領域を識別するために、イメージ領域がサンプリングされる。全体運動によって作用の及ぼされる背景イメージ領域を識別するために、識別された背景イメージ領域のうち少なくとも1つの領域の動きが推定される。イメージフレーム中の全体運動を測定するために、複数の背景イメージ領域からの動きが組み合わせられる。対象物体の局所的な動きを測定するために、対象物体イメージ領域において測定された全体運動が補償され、対象物体の局所的な動きが追従される。さらに本発明は、2つのコントロールポイントセット間の相対運動として対象物体の局所的に変形可能な動きを精確に測定するための方法および装置に関する。コントロールポイントセットは、対象物体の内側の輪郭および外側の輪郭として定義される。この場合、コントロールポイントセットの動きが推定され、対象物体の局所的な変形と局所的な動きを表すために相対的な動きが用いられる。  (もっと読む)
(もっと読む)
動きベクトルフィールド再タイミング
特定の空間的位置を有し、ビデオ画像の系列の第1画像及び第2画像の間における時間的位置(
)において位置される、特定の画素に関する特定の動きベクトル(
)を、前記第1画像に関して推定される第1動きベクトルフィールド(
)に基づくとともに、前記第2画像に関して推定される第2動きベクトルフィールド(
)に基づき推定する方法が開示される。当該方法は、前記特定の画素の前記特定の空間的位置に基づき、前記第1動きベクトルフィールド(
)及び第2動きベクトルフィールド(
)から複数の動きベクトルを選択することによって一群の動きベクトル(
、
、
)を生成するステップと、前記一群のベクトル(
、
、
)に順序統計的演算を実行することによって前記特定の動きベクトル(
)を確定するステップと含む。  (もっと読む)
(もっと読む)
閉塞検出に基づく画素の時間的補間
時間的に第1の画像と第2の画像との中間に位置する特定の画像の特定の画素について値を決定する方法が開示される。前記方法は、前記第1の画像に対応する第1の動きベクトル場(D3(x,n−1))の第1の動きベクトル(Dp)及び第2の動きベクトル(Dpp)に基づいて第1の動きベクトル差を計算するステップと、前記第2の画像に対応する第2の動きベクトル場(D3(x,n))の第3の動きベクトル(Dn)及び第4の動きベクトル(Dnn)に基づいて第2の動きベクトル差を計算するステップと、前記第1の動きベクトル差が前記第2の動きベクトル差よりも小さい場合、前記第1の画像の第1の画素の第1の値に基づいて前記特定の画素の値を確立し、前記第2の動きベクトル差が前記第1の動きベクトル差よりも小さい場合、前記第2の画像の第2の画素の第2の値に基づいて前記特定の画素の値を確立するステップとを有する。 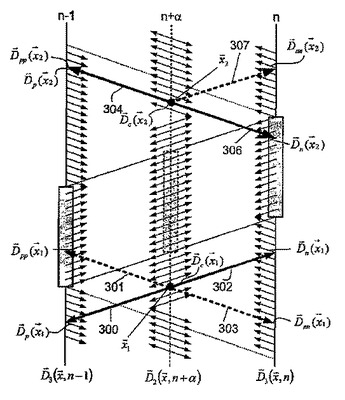 (もっと読む)
(もっと読む)
高ダイナミックレンジ画像を生成するシステムおよび方法

【課題】 シーンまたはカメラの動きが存在しても、連続した段階露出画像から高ダイナミックレンジ(HDR)画像を生成するシステムおよび方法を提供する。
【解決手段】 これは、まず画像の1つを基準画像に選択することによって達成される。次いで、各非基準画像を、検討対象の画像よりも基準画像の露出時間に近く、かつ、他の画像のうちで検討対象の画像の露出時間に最も近い露出時間を示す基準画像を含む別の画像と重ね合わせてフロー場を生成する。すでに基準画像と重ね合わされていない非基準画像に生成されるフロー場を連結して、各非基準画像を基準画像と重ね合わせる。次いで、関連付けられたフロー場を使用して各非基準画像をワープする(動作226)。基準画像とワープした画像を組み合わせて、HDR画像を表す放射輝度マップを作成する(動作228)。
(もっと読む)
モーション情報を符号化するための方法及び装置
映像圧縮アルゴリズムは、通常、モーションデータとテクスチャデータとの結合によって視覚情報を表わす。モーションデータは、フレームのコンテンツと以前のフレームのコンテンツとの間の時間的関係を記述する。本発明は、特に、水平方向及び/又は垂直方向にモーションの境界が存在する下で、モーションデータを効率的に符号化するための方法及び装置を開示する。 (もっと読む)
手振れ補正装置および方法、手振れ検出装置

【課題】小型・低コストでありながら、正確で応答性の良い手振れ補正を行うことができるようにする。
【解決手段】入力画像YC1,YC2を複数段階に亘って段階的に縮小し、より下層レベルの縮小画像を使って大まかに求めた大域移動量を利用して、上層レベルで局所移動量を求める際の走査ブロックを構築することにより、2枚目の画像上に設定する走査ブロックをそれほど大きくしなくても、1枚目の画像上に設定した参照ブロック内の画像と相関がとれるようにする。走査ブロックの大きさを小さくできることにより、その走査ブロック内に同じあるいは類似の絵柄が複数存在する確率が小さくなり、参照ブロックの画像と走査ブロックの画像とが誤った位置でマッチングしたと判断される不都合が抑制される。また、走査対象となる範囲が狭くなるので演算量が減り、手振れ補正の応答性が向上する。
(もっと読む)
車両制御装置、プログラム及び方法
【課題】運転者のブレーキタイミングの特性や車両を取り巻く状況に柔軟に対応することができる車両制御を提供する。
【解決手段】車両制御装置は、自車両の外部の画像を撮影する撮影手段と、他車両の接近を検出するためのテンプレートを記憶するテンプレート記憶手段を有する。テンプレートは、運転者のブレーキ操作に基づいて適宜更新される。車両制御装置は、撮影した画像とテンプレートとを比較して、前方を走行する車両が相当接近してきたために、自車両の減速や停止が必要であるか否かの判断を行う認識処理手段をさらに有している。認識処理手段によって減速や停止が必要と判断され、かつ、運転者によってアクセルペダルを戻したりブレーキペダルを踏むなどの衝突回避の操作が行われなかった場合は、動作指示手段によって自車両に衝突回避操作を実行させる。
(もっと読む)
画像処理装置および画像処理方法
【課題】 フラッシュ撮影に用いたストロボなどの人工照明光の照明ムラに関わらず、照明ムラのない人工照明光で照明した画像を得られる画像処理装置および画像処理方法を提供する。
【解決手段】 ストロボなどによる人工照明光による照明ムラの情報を予め記憶しておき、撮影時に人工照明光ありの第1の画像データと人工照明光のない周囲光のみの第2の画像データを連続して撮像するとともに、第1の画像データから第2の画像データを差し引いたデータに対し予め記憶した照明ムラ情報に基づいた照明ムラ補正を行った後、該照明ムラ補正済みの画像データに対し第2の画像データを加えることにより、照明ムラのない人工照明光で照明した画像を生成する。
(もっと読む)
画像処理装置および画像処理方法
【課題】 フラッシュ撮影に用いたストロボなどの人工照明光の色相に関わらず、所望の色相の照明光で照明した画像を得られる画像処理装置および画像処理方法を提供する。
【解決手段】 複数の色成分に対してストロボなどによる人工照明光ありの第1の画像データと人工照明光のない周囲光のみの第2の画像データを連続して撮像するとともに、各色成分毎に第1の画像データから第2の画像データを差し引いたデータに対し色補正を行った後、該補正済みの画像データに対し第2の画像データを加えることにより、所望の色相の照明光で照明した画像を生成する。
(もっと読む)
画像処理装置および画像処理方法、プログラムおよびプログラム記録媒体、並びにデータおよびデータ記録媒体
【課題】 オブジェクトの抽出等を精度良く行う。
【解決手段】 ユーザに画像が提供され、ユーザが、その画像上の位置をクリックすることにより得られるクリックデータが、動き解析部121に供給される。動き解析部121は、ユーザからの複数のクリックデータに基づいて、ユーザによるクリック位置の動きを解析し、意図解析部123は、その動きの解析結果に基づいて、ユーザの意図を解析する。そして、オブジェクト抽出部125は、そのユーザの意図の解析結果に基づいて、画像データからオブジェクトを抽出する。
(もっと読む)
カメラ
【課題】 被写体の顔の向きを認識し、顔が所定の方向を向いた場合に被写体記録動作を行う。
【解決手段】 被写界の画像情報を検出する被写界像検出手段8と、該被写界像検出手段からの画像情報を基に被写体の顔を認識する顔認識手段21と、該顔認識手段からの情報により、顔が所定方向に向いているかを判定する判定手段22と、該判定手段の判定結果に応じて被写体記録動作を行わせる制御手段23とを有する。
(もっと読む)
1,201 - 1,211 / 1,211
[ Back to top ]