
Fターム[5L096JA13]の内容
Fターム[5L096JA13]の下位に属するFターム
粗精2段 (59)
Fターム[5L096JA13]に分類される特許
21 - 40 / 181
車両検出装置
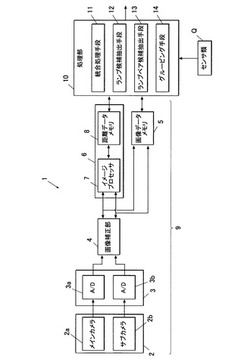
【課題】検出した物体の位置データを的確にグループ化して先行車両等の車両を的確に検出することが可能な車両検出装置を提供する。
【解決手段】車両検出装置1は、画像T上で、統合処理手段11が画像中の画素を抽出して統合した各画素領域gの中から車両のテールランプTLに対応する可能性がある画素領域gをランプ候補gLとして抽出するランプ候補抽出手段12と、位置検出手段9が検出した位置データをグループ化して生成した各グループGについて、ランプ候補gLを含むグループGL同士を再グルーピングした後で、全てのグループG同士を再グルーピングするグルーピング手段14とを備え、再グルーピング処理では、ランプ候補gLを含むグループGL同士の再グルーピングを行う際の閾値Δdp等が、その後の全てのグループG同士の再グルーピングを行う際の閾値Δdp*等よりも、再グルーピングし易い閾値とされている。
(もっと読む)
画像処理装置、画像処理方法およびプログラム

【課題】画像中の特定領域の位置・姿勢を高精度に推定可能な、画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】入力画像I1の特徴点を抽出する特徴点抽出部11と、参照画像Rとの間で特徴点の対応関係を決定するマッチング部12と、対応関係に基づき入力画像I1と参照画像Rの射影関係を算出するホモグラフィ算出部13と、射影関係に基づき入力画像I1の少なくとも一部を変換する画像変換部14とを備え、ホモグラフィ算出部13は、入力画像I1について、参照画像Rとの間で特徴点の対応関係に基づきホモグラフィ行列H1を算出し、画像変換部14によりホモグラフィ行列H1に基づき変換された入力画像I1について、参照画像Rとの間で特徴点の対応関係に基づきホモグラフィ行列H2を算出し、ホモグラフィ行列H1、H2に基づき入力画像I1と参照画像Rの射影関係を再び算出する
(もっと読む)
撮像装置、顔認識方法及びそのプログラム
【課題】 顔認識の精度を向上させることができる撮像装置及びそのプログラムを実現する。
【解決手段】 人用の顔検出モードが設定されているか判断し(S31)、人用の顔検出モードが設定されていると判断すると、2次元の顔検出処理により人の顔を検出する処理を行う(S32)。そして、該2次元の顔検出処理により人の顔がないと判断すると、3次元の顔検出処理により人の顔を検出する処理を行う(S35、S36)。一方、動物用の顔検出モードが設定されている場合は、3次元の顔検出処理により該設定されている検出モードの動物の種類の顔を検出する処理を行う(S36)。
(もっと読む)
特徴抽出装置、特徴抽出方法、特徴抽出プログラム、および画像処理装置
【課題】ローカルバイナリパターンを用いつつ、少ない処理負荷で、画質のばらつきに対してロバストな物体検出が可能な画像特徴を抽出することができる特徴抽出装置を提供すること。
【解決手段】特徴抽出部430は、画像から、複数の解像度の解像度画像を生成する解像度画像生成部433と、生成された解像度画像の全部または一部の画素毎に、周囲の近傍画素との画素値の差分が所定の閾値以上であるか否かをデジタル値により示すローカルバイナリパターンを生成するバイナリパターン生成部を含む解像度ヒストグラム生成部434と、複数の解像度画像から生成されたローカルバイナリパターンの分布を示すヒストグラムを生成するヒストグラム生成部436とを有する。
(もっと読む)
情報処理装置および方法
【課題】 モデル座標系を基準とした位置姿勢の自由度のうち、特定自由度のパラメータを一意に定める特徴が不足するような物体においても、ロバストかつ高精度な位置姿勢計測を実現する。
【解決手段】 計測対象物体との位置姿勢合わせにより、当該計測対象物体の位置姿勢を取得するための三次元形状モデルを保持するモデル保持手段と、前記計測対象物体の画像を取得する画像取得手段と、前記三次元形状モデルの第一の幾何特徴と前記画像内の第一の幾何特徴とに基づき、第一の座標系において、前記三次元形状モデルの第一の位置姿勢を取得する第一の位置姿勢取得手段と、前記三次元形状モデルの第二の幾何特徴と前記画像内の第二の幾何特徴と前記第一の位置姿勢とに基づき、前記第一の座標系と異なる第二の座標系において、前記三次元形状モデルの第二の位置姿勢を取得する第二の位置姿勢取得手段と、を有することを特徴とする。
(もっと読む)
画像認識方法、画像認識装置及び撮像システム
【課題】対象画像の探索処理に要する処理時間の削減効果を向上させる。
【解決手段】予め定められた対象物を表す対象画像を入力画像から抽出する画像認識方法は、対象画像を探索するための入力画像内の探索領域として予め設定された少なくとも1つの第1探索領域の数と、少なくとも1つの第1探索領域それぞれの大きさとの少なくとも1つを示す探索領域情報に基づいて、入力画像内の第2探索領域を設定する探索領域設定ステップ(S105)と、第2探索領域を探索することで、対象画像を抽出する探索ステップ(S106)とを含む。
(もっと読む)
情報処理装置および方法、並びにプログラム
【課題】より確実に対象物を認識できるようにする。
【解決手段】第1の認識処理は、例えば、手を認識する。第2の認識処理は、例えば、人を認識する。取得した画像が手を認識するのに不適切な画像の場合、例えば、画像上の手が小さいため認識できない場合、第2の認識処理を行い、画像上から人を認識する。人が認識された場合、ズーム率などの画質パラメータが新たに取得される。そして、画質パラメータが変更された画像を取得し、再び第1の認識処理を行う。以上の処理を手が認識されるまで繰り返すことで、確実に手を認識する。本発明は、例えばパーソナルコンピュータに適用できる。
(もっと読む)
文字領域検出装置およびそのプログラム
【課題】本発明は、1枚の画像から精度よく文字領域を検出できる文字領域検出装置を提供する。
【解決手段】映像字幕検出装置1は、映像に含まれる字幕領域をその映像から検出するものであり、映像を構成するフレーム画像を出力する映像復号手段10と、フレーム画像を解像度が低い低解像度画像に変換する解像度変換手段20と、記憶手段30と、フレーム画像および低解像度画像に対して字幕検出領域検出処理を施すことで、字幕検出領域を検出する字幕検出手段40と、フレーム画像および低解像度画像から判定された字幕検出領域を統合し、字幕検出を検出結果として出力する検出結果統合手段50とを備える。
(もっと読む)
画像処理システム、撮像装置、画像処理装置及びそれらの制御方法、プログラム
【課題】ネットワークカメラと画像処理装置で構成される画像処理システムの物体検出精度を向上させる。
【解決手段】撮像装置は物体の確からしさを示す尤度を検出する。尤度が基準を満たす場合、指定した種類の物体として検出し、特定済の物体情報を生成する。尤度が基準を満たさない場合、暫定の物体情報を生成する。特定済の物体情報あるいは暫定の物体情報を統合した統合物体情報をネットワークを介して画像処理装置へ送信する。画像処理装置は、統合物体情報に含まれる暫定の物体情報によって指定される検出対象の物体領域について尤度を検出し、尤度が基準を満たす場合は、第2物体検出手段で指定した種類の物体として検出し特定済の物体情報を生成する。一方、尤度が基準を満たさない場合は物体情報を生成しない。統合物体情報に含まれる特定済の物体情報と、第2物体検出手段で生成した特定済の物体情報を結合し、特定済の物体情報として出力する。
(もっと読む)
画像処理装置および画像処理方法
【課題】赤外線画像上の人物の表面温度と背景の温度とが接近している場合でも、人物を
確実に検出可能とする。
【解決手段】ある注目輝度を含んだ所定の輝度幅の輝度範囲で赤外線画像のコントラスト
を拡大する処理(コントラスト強調)を行い、コントラスト強調後の赤外線画像から人物
検出を行う。そして、ある注目輝度で人物の検出を行ったら、注目輝度を更新し、新たな
注目輝度を含む所定の輝度範囲でコントラスト強調を行い、強調後の画像から人物を検出
する。こうすれば、コントラスト強調によってその人物と背景との輝度差を十分に拡大す
ることができる。従って、人物の表面温度が背景の温度に接近している場合でも、背景か
ら人物を浮かび上がらせることが可能となり、赤外線画像に写った人物を確実に検出する
ことができる。
(もっと読む)
画像処理装置及びプログラム
【課題】入力画像に含まれる識別対象物の様々なサイズに対応しつつ、演算量を削減する。
【解決手段】解像度変換部22で、入力画像を異なる複数の解像度の画像に変換した解像度画像の各々を生成し、セル特徴量演算部24で、入力画像及び解像度画像の各々について、単位セルを1画素ずつずらしながらセル特徴量であるエッジ角度のヒストグラムを演算する。ウインドウ画像抽出部26では、入力画像及び解像度画像の各々から、セルサイズを異ならせることによりサイズを異ならせた複数のウインドウ画像の各々を抽出し、ウインドウ特徴量演算部28により、各セルに対応するセル特徴量演算部24で演算されたエッジ角度のヒストグラムを羅列して連結したウインドウ特徴量を演算する。この際、ウインドウ画像のセルサイズと単位セルのセルサイズとが一致しない場合には、単位セルを重複または離間させるように対応させる。
(もっと読む)
画像検索装置、画像検索方法及び画像検索プログラム
【課題】検索対象画像内でテンプレート画像と類似している画像領域を高速に検索することができる画像検索装置を提供する。
【解決手段】検索対象画像内において、テンプレート画像と類似している画像領域を検索する画像検索装置であって、検索対象画像とテンプレート画像とを入力する画像入力手段と、テンプレート画像と検索対象画像間において検索位置を移動しながら、粗い類似尺度の値を求め、求めた類似尺度の値が最良となる検索位置を特定し、該検索位置における詳細な類似尺度の値を求める初期閾値設定手段と、初期閾値設定手段により求めた検索位置における詳細な類似尺度の値を検索閾値の初期値として用いて、画像領域の検索を行う画像検索手段とを備えた。
(もっと読む)
検出器構成装置、方法、及びプログラム
【課題】解像度が異なる複数の段階で検出を行う検出器において、各段階において検出すべき状態や属性といった検出対象のモダリティ種別を客観的に決定する。
【解決手段】検出器構成装置10は、複数のモダリティ種別のそれぞれに対して、入力データに含まれるオブジェクトの属性が複数の属性値の何れであるかを、解像度が相互に異なる複数段階の検出処理で検出する検出器を構成する。教師データ入力部11は、検出器の学習に用いられる、各モダリティ種別に対応した複数の教師データを入力する。変動量算出部13は、入力された教師データに基づいて、モダリティ種別ごとに複数の教師データ間の変動の代表値を求める。検出段決定部14は、教師データ間の変動の代表値に基づいて、複数段階の検出処理のうち、各モダリティ種別をどの段階の検出処理で検出するかを決定する。
(もっと読む)
情報処理装置、その処理方法及びプログラム
【課題】ジェスチャ動作によりオブジェクトを他の領域にコピー又は移動させる際の操作性を向上させる。
【解決手段】ユーザにより行なわれたジェスチャ動作と、ジェスチャ動作が行なわれた表示領域上の位置とを示す情報を取得し、取得した情報に基づいて、表示領域におけるオブジェクトの選択を指示する第1のジェスチャ動作の判定するとともに、表示領域におけるいずれかの領域の選択を指示する第2のジェスチャ動作の判定をする。そして、第1のジェスチャ動作に基づいて選択されたオブジェクト31を同定するとともに、第2のジェスチャ動作に基づいて選択された領域41を同定する。オブジェクト31及び領域41が同定されている状態で同定されたオブジェクト31に対する処理を指示する第3のジェスチャ動作を判定し、第3のジェスチャ動作が行なわれたと判定された場合、同定されたオブジェクト31を同定された領域41にコピー又は移動させる。
(もっと読む)
物体識別装置、物体識別方法、及び、物体識別装置の学習方法
【課題】物体識別精度を向上する物体識別装置、物体識別方法、及び、物体識別装置の学習方法を提供すること。
【解決手段】物体識別装置100において、複数の識別ユニット111が、検出処理対象画像に識別対象物体画像が含まれているか否かをそれぞれ事前判定し、判定部113が、全ての識別ユニットから「真」信号が出力される場合にのみ、検出処理対象画像に識別対象物体画像が含まれていると最終判定する。そして、各識別ユニット111は、並列に接続され且つそれぞれが複数のクラスの内の任意の組み合わせに対応する複数の強識別器121と、複数の強識別器121の内の1つでも検出処理対象画像に識別対象物体画像が含まれていると判定する場合に、「真」信号を出力するOR演算部122とを具備する。
(もっと読む)
対象物検知装置及びその学習装置
【課題】画像から対象物を検知する対象物検知装置において、画像を分割したセルごとに識別器を設け、対象物の特徴が強く現れるセルを選択して検知を行うと、当該セルが隠蔽されたときに対象物を検知し損なう。
【解決手段】後段部32の全体識別関数はセルごとの部分識別器300それぞれから識別指標値を入力される。全体識別関数は、セル数に応じた多次元の正規分布関数であり、部分識別器群302に対象物画像、非対象物画像をそれぞれ多数入力したときの各識別指標値を正規分布として求めた平均・分散により予め定義される。対象物判定部34は、全体識別関数の出力値に基づいて対象物の有無を判定する。
(もっと読む)
物体検出装置および物体検出プログラム
【課題】被写体の特徴を学習させた学習データを作成し、作成した学習データと画像データとを比較することで、画像中に検出対象となる被写体が存在するか否かを判定するにあたり、動的量子化の検出率を保ちつつ、高速に被写体を検出する。
【解決手段】第1量子化部110は、画像領域内の複数の事象のうちいずれかの事象に対して、所定の閾値を用いて量子化を行う静的量子化を実行することで、画像領域に所定の物体が存在する可能性があるか否かを判定する。第2量子化部120は、所定の物体が存在する可能性がある画像領域に対して、この画像領域の画像の特徴に基づいて調整した閾値を用いて量子化を行う動的量子化を実行し、画像領域に所定の物体が存在するか否かを判定する。
(もっと読む)
オブジェクト検出装置、オブジェクト検出方法、およびオブジェクト検出プログラム
【課題】連続して入力された画像のシーンに依存することなく、高精度に、かつ所定の時間内にオブジェクト検出処理を行うことが可能なオブジェクト検出方法、オブジェクト検出プログラムを提供する。
【解決手段】連続して撮影された画像の各々の画像内に設定スキャンウィンドゥを設定するスキャンウィンドゥ設定手段と、前記設定スキャンウィンドゥ内の画像に対して第1のオブジェクト検出を実行し前段処理結果を出力する第1のオブジェクト検出手段と、第2のオブジェクト検出手段によって検出された過去処理結果を保持する過去処理結果保存部と、前記前段処理結果と前記過去処理結果に基づき選択スキャンウインドゥを選択するスキャンウインドゥ選択部と、前記選択スキャンウインドゥからオブジェクトを検出する前記第2のオブジェクト検出部とによって構成されるオブジェクト検出装置。
(もっと読む)
移動軌跡算出方法およびその装置、ならびに領域分割方法
移動軌跡算出装置は、動画像を構成する時間的に連続した複数枚の画像を受け付ける画像受付部(101)と、画像受付部(101)において受け付けられた各画像について、互いに階層の異なる空間的に大きいサイズの小領域が空間的に小さいサイズの小領域を包含するように、階層的に領域分割を行うことにより、複数の階層において小領域を生成する階層小領域生成部(103)と、ある画像における小領域に最も類似する小領域をある画像とは異なる画像において複数の階層をまたがって、かつ1枚以上の画像にわたって探索することによりある画像における小領域の動画像中での移動軌跡を代表移動軌跡として算出する代表移動軌跡算出部(104)とを備える。 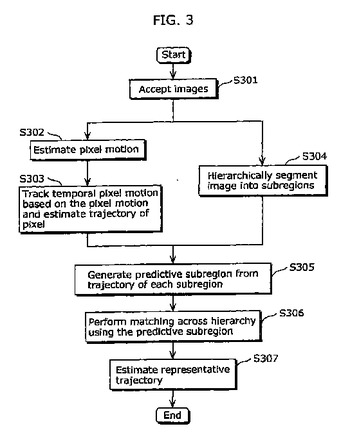 (もっと読む)
(もっと読む)
顔検出方法および装置並びにプログラム
【課題】検出対象画像から顔画像を検出する処理において、検出対象画像に施す前処理としての正規化処理につき、種類の異なる各正規化処理の利点をより活かし、高精度、かつ、効率のよい顔検出を可能にする。
【解決手段】処理対象となる画像に対する前処理として、検出対象画像から顔画像候補を抽出するラフな検出段階においては、処理時間が短い、画像全体の画素値を一つの変換曲線にしたがって変換する全体正規化処理を採用し(ステップS3)、顔画像候補が真の顔画像であるか否かを判別する絞込み段階においては、処理時間は長いが高い効果が期待できる、局所正規化処理を採用する(ステップS11)。
(もっと読む)
21 - 40 / 181
[ Back to top ]