
Fターム[5L096JA13]の内容
Fターム[5L096JA13]の下位に属するFターム
粗精2段 (59)
Fターム[5L096JA13]に分類される特許
161 - 180 / 181
画像認識装置及び画像認識方法

【課題】精度よく画像認識が行える画像認識装置及び画像認識方法を提供すること。
【解決手段】撮影したカラー画像から標識候補を抽出し(S14)、抽出した標識候補について白領域に対応する部分が本来の色になるように色補正を行い(S22)、その色補正した標識候補が認識対象物であるか否かを判断する(S26)。これにより、標識候補が認識対象物であった場合には、色補正により標識候補が本来の色合いに補正される。一方、標識が認識対象物でない場合には、色補正により標識が認識対象物とかけ離れたものとなる。従って、標識候補が認識対象物であるか否かを正確に識別することができ、精度よく画像認識が行える。
(もっと読む)
画像処理方法、画像処理装置及び画像合成処理装置

【課題】同一被写体を撮影して得られた複数の撮影画像同士を高精度に対応付け可能とする。
【解決手段】同一の被写体を撮影して得られた複数の撮影画像の各々から特徴点を抽出し、当該被写体の同一点に対応する特徴点同士を対応付ける画像処理では、各撮影画像の間で、被写体の同一点に対応する特徴点の候補となる対応特徴点候補同士の座標値を評価し(A2)、各々の撮影画像内で、対応特徴点候補と当該対応特徴点候補の近傍に位置する特徴点との位置関係を評価し(A7)、座標評価及び位置関係評価において得られた評価情報に基づいて、被写体の同一点に対応する対応特徴点があるか否かを判定し、対応特徴点を決定する(A8)。
(もっと読む)
画像識別装置、画像識別処理プログラム、画像識別処理方法、および登録画像データのデータ構造
【課題】画像識別装置で、識別したい画像データと共に非常に似通った画像データが登録画像データに多く存在する場合でも、同一種の画像のみを確実に合致判定して識別する。
【解決手段】登録画像G0iに設定した7つの基準マスク位置P1〜P7とこれに応じ照合画像Gjにて検出される最大相関位置Q1〜Q7との相対位置の比較差に基づき類似度算出する第1(共通条件)パターンマッチング処理にて識別候補の登録画像G0iの個数n2が1個まで絞り込まれてないと判断された場合、さらに登録画像と共に記憶された個別識別用条件情報に基づき登録画像G0iに設定した2つの画像部分K1,K2とこれに応じて照合画像Gjにて検出される2つの最大相関部分I1,I2との相対位置の比較差に基づき類似度算出する第2(個別条件)のパターンマッチング処理が実行される。登録画像G0iの個別識別用条件情報にも類似した場合に、照合画像Gjと同一種の画像として合致判定(識別)される。
(もっと読む)
2次元画像からの3次元オブジェクトの不変視点検出および識別
2次元ソース画像から複数の特徴を含む3次元ソースオブジェクトを検出し、かつ、候補オブジェクト間で視点と照明が不変である検索を実行することによりそのようなオブジェクトの候補データベースから最良マッチングする3次元オブジェクトを探索する方法およびシステムを提供する。本発明はさらに、探索された3次元候補の最適に適合する視点、照明、および変形を決め、かつ、候補の投影とソース画像との適合の質に基づいてソースに関連付けて候補を識別する方法およびシステムを含む。  (もっと読む)
(もっと読む)
画像マッチング方法および装置
【課題】二つの画像から対応点をマッチングする画像マッチング方法を提供する。
【解決手段】第1の画像相関ポテンシャルエネルギーを用いて、対象画像から参照画像への第1の写像関係を求め、該参照画像から該対象画像への第2の写像関係を求める第1の画像マッチングと第2の画像相関ポテンシャルエネルギーを用いて、対象画像から参照画像への第3の写像関係を求め、該参照画像から該対象画像への第4の写像関係を求める第2の画像マッチングとを行い、対象画像上の点を第1の写像関係により写像した点が第2の写像関係によって写像された点を求め、それらの点の位置関係によって第1の信頼確率を算出し、対象画像上の点を前記第3の写像関係により写像した点が前記第4の写像関係によって写像された点を求め、それらの点の位置関係によって第2の信頼確率を算出し、第1,第2の信頼確率に従って、前記第1乃至第4の写像関係に基づく写像を合成する。
(もっと読む)
オブジェクト領域抽出システムおよび方法
【課題】特徴量が変化する同一および同種のオブジェクトの検索に適したオブジェクト領域抽出システムおよび方法を提供する。
【解決手段】オブジェクト領域抽出システム10は、例示画像を用いて求めた色に関する各クラスタが持つ特徴量および形状に関する各クラスタが持つ特徴量が格納された特徴量記憶装置22と、オブジェクト領域を含む入力画像に対して、色に関する各クラスタが持つ特徴量を用いて段階的に第1のオブジェクト候補領域の絞込みを行う第1のオブジェクト候補領域抽出部11と、この第1のオブジェクト候補領域に対して、形状に関する各クラスタが持つ特徴量を用いて段階的に第2のオブジェクト候補領域の絞込みを行う第2のオブジェクト候補領域抽出部12と、この第2のオブジェクト候補領域からオブジェクト領域を決定するオブジェクト領域決定部13とを備える。
(もっと読む)
照合装置及び登録装置
セキュリティの向上、照合処理の高速化、個人を確認する情報を伝送する通信路の負荷軽減を図ることができる照合装置を提供する。これにより、着脱可能な可搬記憶媒体3を有し、サーバ4とネットワークで接続された照合装置2であって、マルチメディア情報取得部21で取得した個人を確認する情報を、複数の場所に分散配置された記憶部23,31,41の中に予め格納されている照合用の個人を確認する情報のそれぞれと照合処理P1,P2,P3で段階的に照合するにより問題の解決を図る。 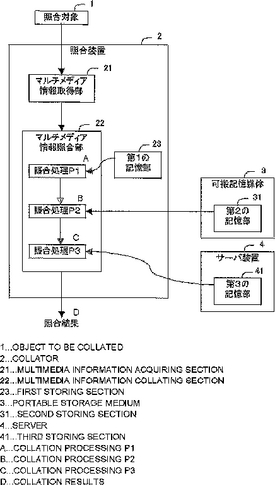 (もっと読む)
(もっと読む)
クラス分け事象の重み付けと時間的安定化のための方法
本発明は、コンピュータ支援されて実行されるクラス分け方法(100)、特にクラス分けすべき対象が時空間を越えて感覚的に把握され、等級尺度も含めて対象クラス毎に繰返しクラス分けがなされる、クラス分け事象の重み付けと時間的安定化のための方法に関している。ここではより良好なクラス分けを保証するために、
a)後続のクラス分けが先行のクラス分けの事象を承認した場合に、信頼度の切り上げ(110,120)を実施するステップと、
b)後続のクラス分けが先行のクラス分けの事象を承認しない場合に、信頼度の切り下げ(110,120)を実施するステップと、
c)信頼度の切り上げ若しくは切り下げも含めた最終的なクラス分け事象を形成するステップとが実施される。  (もっと読む)
(もっと読む)
画像認識システム、画像認識方法、及び画像認識プログラム
【課題】被写体が、どのような状態で画像に含まれているかに関わりなく、当該被写体を確実に認識する。
【解決手段】画像に含まれる被写体を認識する画像認識システムであって、複数の被写体のそれぞれに対応付けて、当該被写体の特徴を示す特徴量を格納している特徴量データベースと、特徴量データベースに格納されている特徴量に基づいて、画像に含まれる被写体を認識する被写体認識部と、被写体認識部によって画像に含まれる被写体が認識された場合に、当該被写体に対応付けて特徴量データベースに格納されている特徴量とは異なる、当該被写体の特徴を示す他の特徴量を、画像から抽出する特徴量抽出部とを備え、被写体認識部は、特徴量抽出部によって抽出された他の特徴量に基づいて、画像に含まれる被写体を認識する画像認識システムを提供する。
(もっと読む)
照合方法、コンピュータ、およびプログラム
【課題】登録画像の個数が多い場合であっても高速に照合処理を行うことができる照合方法、コンピュータ、およびプログラムを提供する。
【解決手段】照合装置1が、基準画像と被照合画像との間の第1の相関値を生成し、基準画像と複数の登録画像それぞれとの間の複数の第2の相関値であって、第1の相関値よりも前に生成された第2の相関値、および第1の相関値に基づいて、複数の登録画像のうち被照合画像との照合に用いる一部の登録画像を特定し、または登録画像の照合に用いる順番を決定する。
(もっと読む)
画像判断装置、画像形成装置、画像判断方法、画像判断プログラム、画像形成プログラムおよびコンピュータ読取り可能な記録媒体
【課題】 原稿に類似したまたは同じである画像を、高い検索精度を保ちつつ、短時間で特定することができる画像判断装置を提供する。
【解決手段】 合成することで元の画像となる複数のレイヤーからなるレイヤー群(A)を取得する第一取得部20と、上記レイヤー群(A)と同じ構造を有するレイヤー群(B)を取得する第二取得部23と、上記レイヤー群(A)とレイヤー群(B)との、同一種類のレイヤーごとに比較するとともに、レイヤー群(A)とレイヤー群(B)との類似度を判定するレイヤー比較部28とを備えている。
(もっと読む)
画像の回転版を利用したオブジェクト検出
所定のオブジェクトを画像から検出する方法(200、300、400)は、画像において、可能性のある所定のオブジェクトを検出すること(212、314、414)を含む。この方法では、画像の少なくとも一部が回転し(214、318、422)、可能性のある所定のオブジェクトが画像の回転された少なくとも一部において検出されるかどうかについて判断される(216、320、424)。さらに、可能性のある所定のオブジェクトが画像の回転された少なくとも一部において検出されるかどうかの判断に応じて、可能性のある所定のオブジェクトが所定のオブジェクトの正確な検出であるかどうかを判断する(218、326、430)。 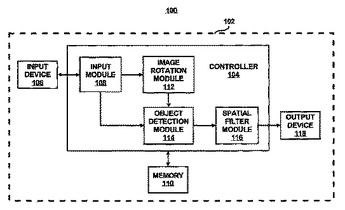 (もっと読む)
(もっと読む)
生体情報認証装置及び方法,並びに生体情報認証プログラム及び生体情報認証プログラムを記録したコンピュータ読取可能な記録媒体
【課題】 生体情報を用いた個人認証において、照合時間を拡大させることなく、特徴点方式による照合のみでは未対応な認証対象に対しても確実に照合できるようにする。
【解決手段】 第1照合データと予め登録された第1登録データとを特徴点方式で照合する第1照合部12と、第2照合データと予め登録された第2登録データとをパターンマッチング方式で照合する第2照合部22と、第1照合部による照合結果として得られる、第1照合データと第1登録データとの一致度(以下、第1一致度という)と、予め設定された第1の閾値及び予め設定された第2の閾値とを比較し、第1一致度が第1の閾値以下であり且つ第2の閾値以上である場合に、第2照合部22による照合を行なわせる判定部14とをそなえる。
(もっと読む)
領域検出装置、領域検出プログラムおよび領域検出方法
【課題】画像サンプル集合から得られた部分空間を利用して入力画像から特定オブジェクトの画像領域を検出する検出処理を高速化できる領域検出技術を提供する。
【解決手段】領域検出装置では、顔(特定オブジェクト)の画像サンプル集合の主成分分析に基づく主成分空間を利用し、入力画像から切出された画像領域に顔が含まれるかを検出する。この検出では、画像領域のピクセルをベクトル化し、まず主成分空間を張る複数の基底ベクトルのうち1の基底ベクトルに射影して、主成分空間までの距離(DFFS)と主成分空間内での距離(DIFS)とを算出する。ここで、算出されたDFFS、DIFSが所定の範囲内にない場合には、画像領域内に顔がないとして他の基底ベクトルへの射影を打切る。その結果、特定オブジェクトに関する検出処理を高速化できる。
(もっと読む)
顔を識別するシステムおよび方法
【課題】人間の顔の識別性能を改善する。
【解決手段】方法は、顔の実質的に異なる部分の同時に取得された画像の対を使用して顔の認識を改善する。かかる対を使用することにより、顔の3Dポーズおよび実際のサイズを確定することができ、それにより、正規化と、データベースに格納された識別された顔の類似する画像対との比較とが改善される。
(もっと読む)
画像処理装置及びその方法、プログラム
【課題】比較元画像と比較先画像間の類似比較を行うための比較領域の位置を決定する画像処理装置等を提供する。
【解決手段】決定された位置補正量で、比較元領域の位置を補正する。補正された比較元領域と比較先領域を指定された数に分割する。分割ブロック毎に、比較元領域と比較先領域の特徴量を算出する。複数の位置をずらした後の類似距離を、両者が重複する重複領域内の各ブロックの特徴量に基づいて算出する。算出した類似距離の内、最小の類似距離に対する位置ずらしパターンと、ブロックのサイズに基づき次回の位置補正量を算出する。位置補正量が算出される毎に、前回の類似比較における分割数を増加させたブロック分割数を指定して、上記処理を再帰的に実行する再帰処理を実行する。位置補正量が算出される毎に、再帰処理を終了するか否か判定し、終了する場合、その時点の前記位置補正量を、比較元領域の位置補正量とする。
(もっと読む)
テンプレート照合装置および方法
【課題】 テンプレート照合の高速化をはかる。
【解決手段】 テンプレートからサイズの異なるサブテンプレートを生成し、小さいものから順に照合操作を行い、類似性があると判断されたときに段階的にサイズの大きなサブテンプレートで照合を行う。サブテンプレートを用いた照合の計算途中で類似性がないと判断された場合、その照合をうち切り、同時にその近傍の領域との照合も省略する。また、類似するテンプレート同士をグループ化し、グループ内で異なるテンプレートに含まれるサブテンプレート間の自己距離値を事前に算出しておくことで、ある参照サブテンプレートで照合した結果をグループ内で反映し、三角不等式の原理で計算の省略を行う。
(もっと読む)
画像認識装置、画像認識方法、画像認識プログラムおよび画像認識プログラムを記録した記録媒体
【課題】短時間で精度の高い画像認識を実現することができる画像認識装置、画像認識方法、画像認識プログラムおよびそのプログラムを記録した記録媒体を提供する。
【解決手段】照合データ記憶部25には、予め複数人の顔画像の照合データが登録されている。照合データは、各人について、複数枚の顔画像に対応した個別照合データと、1つの代表照合データとを含む。代表照合データは、複数の個別照合データを代表するデータである。照合データ選択部42は、まず、代表照合データを照合対象として選択する。類似度演算部41は、被照合顔画像データと代表照合データとを照合し、類似度を演算する。この類似度が低ければ、照合データ選択部42は、その代表照合データに対応する複数の個別照合データについては、被照合顔画像データとの照合対象から除外する。
(もっと読む)
画像を表現する方法、この方法の使用により導出される記述子、この記述子の送信、受信、および記憶のいずれかを含む使用ないし記述子の記憶装置、顔の認識、検出、または分類を行う方法及び装置ないしそのコンピュータプログラム及びコンピュータ読み取り可能な記憶媒体
【課題】 顔認識方法、装置、およびシステムは、顔画像および顔画像成分に適用される周波数ベースの変換の係数に適用される複数の双対線形判別解析(LDA)変換を含む構造を用いる。
【解決手段】 この新規の方法は、従来技術と比較して抽出の複雑性を大幅に低減するとともに、顔のポーズ、照明条件、および他の要因に対して向上した堅実性を提供し、ひいては認識または認証の性能を向上させる。
(もっと読む)
構成要素に基づいた物体の同一性確認システムを訓練するシステム及び方法
構成要素に基づいた顔認識システムを訓練するために、事例として用いる構成要素を決定するシステムと方法が提示される。一つの実施形態においては、構成要素の初期の形状と大きさが決定され、訓練集合が構築され、構成要素認識分類器が訓練され、そして分類器の精度が予想される。構成要素は四方向(上、下、左および右)のそれぞれの方向へ暫定的に拡張され、分類器の精度に及ぼす影響が決定される。その後、構成要素は分類器の精度を最大化する方向へ拡張される。処理は分類器の精度を最大化するために多数回実行しても良い。  (もっと読む)
(もっと読む)
161 - 180 / 181
[ Back to top ]