
Fターム[5L096JA13]の内容
Fターム[5L096JA13]の下位に属するFターム
粗精2段 (59)
Fターム[5L096JA13]に分類される特許
81 - 100 / 181
画像処理装置、画像処理方法、及びコンピュータプログラム
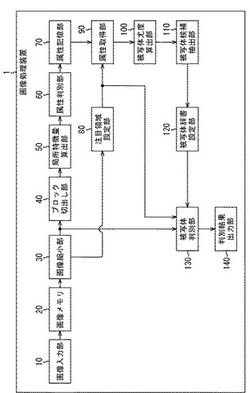
【課題】 画像中から複数種類の被写体の判別を効率良く、且つ高精度に行えるようにする。
【解決手段】 複数種類の被写体の判別を行う際に、1つの縮小画像401から複数の局所特徴量を抽出し、当該局所特徴量の夫々と、当該局所特徴量の画像特性に応じた属性とを対応付けて記憶する。そして、注目領域402の特徴量の属性から、複数の被写体に対する被写体尤度を求め、被写体尤度が閾値以上の被写体を被写体候補とし、被写体候補が所定の被写体であるか否かを判定するようにした。すなわち、被写体に固有の特徴量による被写体の判別を行う対象となる被写体の数を絞り込むようにした。その結果、複数種類の被写体の判別を高精度に実現できる。また、局所特徴量の算出及び局所特徴量とその属性との対応付けは、被写体の種別に依らず共通の処理で行うので、複数種類の被写体の判別を効率良く行うことができる。
(もっと読む)
標識認識装置及び標識認識方法

【課題】認識対象に発光体標識と非発光体標識の両方が含まれる場合でも、その標識の内容を的確かつ比較的容易に認識することができる標識認識装置及び方法を提供すること。
【解決手段】標識認識装置100は、発光体標識照合部112と、非発光体標識照合部113と、候補領域画像の輝度分布に基づいて、候補領域画像が発光体標識の画像かあるいは非発光体標識の画像かを判断する輝度分布評価部104と、候補領域画像が発光体標識と判断された場合には発光体標識照合部112で照合を行わせ、候補領域画像が非発光体標識と判断された場合には非発光体標識照合部113で照合を行わせる照合制御部105とを有する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】階層型の勾配法において、画像パターンに応じた変位量の収束の容易さを考慮することにより、特徴点の追跡を効率的に行う。
【解決手段】変位算出部26は、画像メモリ14中の基準ピラミッドpy1及び追跡ピラミッドpy2から画像サイズが最小の階層画像をそれぞれ読み込んで、勾配法を用いて追跡点の反復検出を実行する。そして求めた特徴点間の変位量を繰り返し算出し、変位量が収束するまでの追跡点検出の反復回数及び収束時における変位量の値を反復条件設定部28に出力する。反復条件設定部28は、入力された反復回数及び変位量に基づいて変位量の収束判定の条件を設定する。変位算出部26は設定された収束判定条件に従って上位の階層画像を読み込んで追跡点検出を行う。そして上記追跡点の反復検出と収束条件の設定変更が繰り返される。これにより追跡点の反復検出回数を抑制している。
(もっと読む)
パターンの消失に対応したマッチング方式及びそれを用いた検査装置
【課題】
本発明の課題は微細なパターンが消失してしまう場合でも、正しく、かつ安定的に(誤報と区別して)マッチングできる手法及びそれを実装した検査装置を提供することである。
【解決手段】
本発明による検査装置は、通常のテンプレートの他に微細なパターンが消失した状態を模する縮退テンプレートを持ち、複数のテンプレートでマッチングを行い、それぞれのマッチングで得られた候補をマージすることで、実ウェーハ上で微細なパターンが消失している場合においても、正しく、安定的にマッチング位置を得ることができる。
【効果】
CADデータに存在しているパターンが実ウェーハ上では消失してしまっている場合にも、失敗せず、安定的にマッチングを行うことができる。
(もっと読む)
画像処理装置及び画像処理方法、コンピュータプログラム及び記録媒体
【課題】 外部装置と画像処理装置の双方に特定領域を検出する処理を有する場合に、外部装置で検出した結果をそのまま印刷装置で用いると誤検出が増える。また、画像処理装置で検出処理の全ての項目を処理すると時間がかかってしまう。
【解決手段】 外部装置から画像データと前記画像データを解析して得られた撮影情報を入力し、入力された撮影情報に基づき、前記画像データから特定領域を検出する際の角度範囲またはサイズを設定し、設定された角度範囲またはサイズに基づいて、特定領域を検出する。
(もっと読む)
画像処理装置および画像処理方法
【課題】演算量を減らすことができるとともに、信頼性の高いデータが得られかつ精度も高い画像処理装置および画像処理方法を提供する。
【解決手段】この画像処理装置は、基準画像と参照画像とを入力し取得する画像入力部11と、基準画像および参照画像の各多重解像度画像を生成する多重解像度画像生成部12と、対応点探索処理を行う画像解像度を選択するともに対応点探索処理を行う基準画像上の各領域に対応する参照画像の探索領域を設定する解像度選択・対応点探索領域設定部13と、解像度選択・対応点探索領域設定部13の情報に基づいて基準画像と参照画像との間の対応点を探索する対応点探索処理部14と、を備え、多重解像度画像を用いてステレオ画像処理または時系列画像処理を行う。
(もっと読む)
撮像装置、画像処理装置、これらにおける画像解析方法およびプログラム
【課題】複数の画像解析処理の処理速度を速める。
【解決手段】解像度変換部130は、カメラ信号処理部123からの撮像画像を複数の異なる解像度の画像に変換する。そして、この複数の異なる解像度の画像が1組の画像群として、画像メモリ500の複数のバンクに順次書き込まれる。顔検出部200は、画像メモリ500の複数のバンクのうち処理の開始直前に書込みがされたバンクの複数の画像の組合せを用いて顔検出処理を行う。顔属性検出部300は、その複数のバンクのうち処理の開始直前に書込みがされたバンクの複数の画像の組合せを用いて顔属性検出処理を行う。個人識別部400は、その複数のバンクのうち処理の開始直前に書込みがされたバンクの複数の画像の組合せを用いて個人識別処理を行う。なお、顔検出処理、顔属性検出処理および個人識別処理で用いられる複数の画像の組合せは異なる。
(もっと読む)
画像間対応付けプログラム、画像間対応付け装置および画像間対応付け方法
【課題】画像間の対応付けを迅速に行なうこと。
【解決手段】ピラミッド特徴点グラフ生成部12aは、下位階層にて分類された各部分集合の代表特徴点の集合を上位階層の特徴点集合として生成する処理を、最下位階層の特徴点集合から順に繰り返すことにより、ピラミッド特徴点グラフを生成し、マッチングリスト生成部12bは、2つの画像の間で対応付けを行なう際に、ピラミッド特徴点グラフ生成部12aによって生成されたピラミッド特徴点グラフの最上位階層それぞれの特徴点の間で類似度を算出してマッチングリストを生成する。そして、マッチングリスト生成部12bは、下位階層において、上位階層にて対応付けられた特徴点それぞれが代表特徴点とされる部分集合に含まれる特徴点それぞれの間で、類似度を算出してマッチングリストを生成する処理を、最上位階層の直下にある階層から順に繰り返すことにより、最下位階層の複数の特徴点の間を対応付ける。
(もっと読む)
オブジェクト検出装置、オブジェクト検出方法、オブジェクト検出プログラムおよび印刷装置
【課題】オブジェクトの検出に多くの時間を要していた。
【解決手段】入力画像から所定のオブジェクトを検出するオブジェクト検出装置であって、上記入力画像における画像領域のうち上記オブジェクトに対応する色域に属する画像領域以外の画像領域の画素値を、所定の代表値に置き換える変換部と、上記置き換えが実行された入力画像上に検出窓を設定し、当該検出窓内における画素値のばらつきを求めるとともに、当該ばらつきが所定値以上である場合に、当該検出窓内の画像を対象として上記オブジェクトの有無を判定する判定部とを備えるオブジェクト検出装置とした。
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
【課題】
本発明は、二次元的に配列された画素で表現された画像から特定種類のオブジェクト、例えば人間の頭部や人間の顔などを検出するオブジェクト検出方法等に関し、検出対象のオブジェクトが画像上に様々な寸法で写し出される場合であっても、そのオブジェクトを高速に検出する。
【解決手段】
オブジェクト検出対象の原画像を構成する画素を所定比率で間引くことにより、又は所定比率で段階的に間引くことより、原画像と一枚以上の間引画像とからなる画像群を生成する画像群生成ステップS21と、
相対的に小さい画像に相対的に狭い領域に作用するフィルタを作用させる抽出過程から相対的に大きい画像に相対的に広い領域に作用するフィルタを作用させる抽出過程に向けて順次に繰り返すことにより、原画像中から特定種類のオブジェクトを検出する段階的検出ステップS24とを有する。
(もっと読む)
インターホン装置
【課題】環境が変化する屋外などで撮影した画像に対しても、誤検知することなく、安定して顔の存在を検知可能な顔検知装置を備えたインターホン装置を提供する。
【解決手段】呼び出し釦158を備えたインターホン子機150と、呼び出し釦の操作に応じて呼び出し音を報知する鳴動部132を備えたインターホン親機100からなるインターホン装置は、インターホン子機150前面の画像を入力する画像入力部152と、呼び出し釦操作したときの入力画像から動き領域を抽出する動き領域抽出部126と、動き領域が所定量以上の場合顔画像を含んでいるか否かを判定する判定部120と、判定部120の判定結果に応じて異なる呼び出し音を鳴動部132に出力する制御部124とを備え、動き領域が所定量未満の場合、更に異なる呼び出し音を鳴動部132に出力する。
(もっと読む)
特徴点位置決定方法及び装置
【課題】簡単な処理で複数の特徴点位置を高精度に決定可能とする。
【解決手段】画像中の特徴点の位置を決定する特徴点位置決定方法では、画像中の複数の特徴点の位置を予め設定された探索範囲で第1の探索を行い、探索された複数の特徴点の幾何学的な配置関係に基づいて当該複数の特徴点の位置を補正し、補正された各特徴点の位置に基づいて探索範囲を設定して当該探索範囲で各特徴点の位置を探索する第2の探索を行う。そして、第2の探索で探索された各特徴点について位置の信頼性を判定することにより、上記補正された位置と、上記第2の探索で探索された位置とのいずれかを選択する。
(もっと読む)
目標物検出システム
【課題】 用いるテンプレート画像を極力少なくして、衛星画像等の探索対象とする画像から目標物を検出することが可能な目標物検出システムを提供する。
【解決手段】 サンプル画像上で、目標物として検出したい対象物を指定すると、指定された位置に対応するサンプル画像上から、テンプレート画像と同形状の画素ブロックを抽出し、テンプレート画像および画素ブロックを用いて所定の類似性評価値を算出する。所定の類似性評価値が最小値または最大値をとるサンプル画像上の画素位置を特定し、当該画素位置に対応する画素ブロック(a)を用いてテンプレート画像(b)上の画素を置き換え、得られた合成画像(c)でテンプレート画像を更新する。
(もっと読む)
目標物検出システム
【課題】 衛星画像等の探索対象とする画像から、目標物を高速、高精度で自動抽出することが可能な目標物検出システムを提供する。
【解決手段】 同一テンプレート画像について、角度が異なる8つのパターンを用意しておき、まず、テンプレート画像の1つを用いて、探索対象画像上で角度に依存しないパターンマッチングを行う。角度に依存しないパターンマッチングで適合となった場合は、さらに、角度が異なる8つのパターンそれぞれを用いて、探索対象画像上で角度に依存したパターンマッチングを行う。角度に依存したパターンマッチングで適合となった場合は、目標物を検出したとして結果を出力する。
(もっと読む)
目標物検出システム
【課題】 目標物を含んだテンプレート画像を用いて、衛星画像等の探索対象とする画像から目標物を抽出する際に、テンプレート画像と目標物が類似しているかどうかを判定する判定基準値の設定を適切に行うことが可能な目標物検出システムを提供する。
【解決手段】 サンプル画像上で、目標物として検出したい対象物を指定すると、指定された位置に対応するサンプル画像上から、テンプレート画像と同形状の画素ブロックを抽出し、その画素ブロックとテンプレート画像両者について、輝度ヒストグラムの照合(S201)、階調変動ヒストグラムの照合(S202)、重心間距離の算出(S203)、慣性モーメントの照合(S204)、グレー階調画素差分の算出(S205)、正規化相関係数の算出(S206)を実行し、6つの類似性評価値の値を更新する。指定された位置付近の所定の位置についても実行し、6つの類似性評価値の最小または最大値に基づいて、判定基準値を設定する。
(もっと読む)
パターン認識装置、パターン認識プログラム及びパターン認識方法
【課題】パターン認識率を向上する。
【解決手段】このパターン認識装置は、入力された文字パターンを特徴ベクトルに変換する入力部21と、標準的な認識ベクトル(固有値および固有ベクトル)が記憶された認識用辞書27と、入力部21により変換された文字の特徴ベクトルから、認識用辞書27の認識ベクトルと比較するための文字パターン固有の特徴を示す複数の認識ベクトルを求める特徴抽出部22と、複数の認識ベクトルと認識用辞書27に記憶された認識ベクトルとを比較してパターン認識を行い、固有ベクトル毎に一致の度合いを示すスコアを求める認識部24と、固有ベクトル毎の1位候補のスコアと2位候補のスコアとの関係から1位候補の認識結果の信頼度を求める信頼度計算部23と、信頼度計算の結果から信頼度が閾値以上の固有ベクトルを選択し認識部24に出力するベクトル選択部25とを備える。
(もっと読む)
対応点探索装置
【課題】探索ウインドウが入力画像からはみ出して設定された場合であっても、演算コストを増大させることなく、対応点を精度良く探索する。
【解決手段】判定部14は、基準画像及び参照画像に設定された基準ウインドウ及び参照ウインドウにおいて外領域が含まれているか否かを基準ウインドウ及び参照ウインドウがずらされる毎に判定する。補間部15は、判定部14により外領域が含まれていると判定された場合、基準ウインドウ及び参照ウインドウ内の両画像の少なくとも端に位置する画素の画素値に基づいて補間画素値を算出し、当該補間画素値により外領域を補間する。
(もっと読む)
画像照合方法及び画像照合装置並びに画像照合プログラム
【課題】処理速度が速く、かつ、照合精度も高い画像照合を行う。
【解決手段】特徴抽出手段102は、画像入力手段101からの画像データを数値データに変換する。特徴格納手段203は、数値データをインデックスと共に格納する。紙面を画像入力手段101で再度スキャンし、特徴抽出手段102で得た数値データに対して、特徴格納手段203に格納されている数値データのうち紙面に記載された画像に相当するものを選び出す際において、第一の照合手段201は、特徴抽出手段102で得た数値データと、特徴格納手段203に格納されている数値データの各一部分を用いて、一番類似している数値データに対応するインデックスを選び出す。第二の照合手段202は、第一の照合手段201で使用しなかった残りの部分の数値データを用いて、一番類似している数値データに対応するインデックスを選び出す。
(もっと読む)
物体認識装置、物体認識方法、物体認識プログラム、および該プログラムを格納するコンピュータ可読媒体
【課題】物体認識装置、物体認識方法、物体認識プログラム、およびコンピュータ可読媒体を提供する。
【解決手段】 本発明の物体認識装置1000は、テンプレート画像から、複数の階層テンプレート画像を作成する階層テンプレート生成手段50と、複数のフレーム画像のそれぞれから、複数の階層フレーム画像を作成する階層フレーム生成手段60と、同一の削減率を有する階層フレーム画像と階層テンプレート画像とを組み合わせ、削減率の大きい順にテンプレートマッチング処理を行うマッチング手段90と、テンプレートマッチング処理時に、階層フレーム画像の各領域における類似度を求める類似度計算手段100と、類似度と所定の閾値とを比較する閾値判定手段110と、を備え、閾値よりも小さい類似度を有する領域については、以降の前記テンプレートマッチング処理を行なわず、最後に該処理を行った階層フレーム画像の最も高い類似度を有する領域に物体が存在すると判断する。
(もっと読む)
情報処理装置および情報処理方法
【課題】 カスケードに接続される複数の弱判別器を用いて画像データより特定のオブジェクトを抽出するにあたり、抽出処理速度と抽出精度との組み合わせを柔軟に変更できるようにする。
【解決手段】 カスケード接続される弱判別器を用いてデータを処理する情報処理装置であって、前記複数の弱判別器それぞれの処理内容を規定する情報を格納するROM205と、前記複数の弱判別器のうち使用すべき弱判別器を決定するための情報が規定されたテーブルを参照することにより、前記データの処理に使用すべき弱判別器を前記複数の弱判別器から選択する手段(201)と、前記選択された弱判別器に対応する前記処理内容を規定する情報に基づいて、前記データを処理することで得られた該弱判別器の評価値を用いて、前記データよりオブジェクトを抽出する手段(203)とを備える。
(もっと読む)
81 - 100 / 181
[ Back to top ]