
国際特許分類[A01B59/04]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 農業または林業における土作業:農業機械または器具の部品,細部または附属具一般 (4,134) | 役畜またはトラクタと農業機械または器具とを連結するのに特に適合した装置 (179) | トラクタによって牽引されたり押されたりする機械のためのもの (165)
国際特許分類[A01B59/04]の下位に属する分類
作業機の側方遊びの防止または制限 (2)
トラクタの後部に装着された牽引手段をもつもの (142)
トラクタの中央部に装着される牽引手段をもつもの (1)
トラクタの側面に装着された牽引または押圧手段をもつもの (3)
トラクタの前部に装着された牽引または押圧手段をもつもの (9)
国際特許分類[A01B59/04]に分類される特許
1 - 8 / 8
農作業機
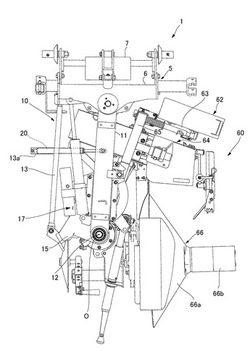
【課題】オフセット機構部の揺動時にガススプリングを効率的に利用し、ガススプリングの農作業機への搭載時に、重量の増大や装着作業の増大を抑制可能な農作業機を提供する。
【解決手段】農作業機の一例である畦塗り機1は、走行機体の後部に装着されるヒッチフレーム6と、このフレームの進行方向に対して左右方向に揺動自在に連結されるオフセットフレーム11及びリンク部材13と、このフレーム及びリンク部材13の移動端側に連結される回動支持アーム15とを有して平行リンク機構を構成し、回動支持アーム15に作業部60を回動自在に支持する。ヒッチフレーム6及びオフセットフレーム11間に接続されたガススプリング20は、作業部60が前進作業位置又は後進作業位置から格納位置への移動時に伸長し、作業部が格納位置から前進作業位置又は後進作業位置への移動時に縮小し、作業部が格納位置に移動すると略伸びきった状態となる。
(もっと読む)
作業車両

【課題】複数の作業機と通信を行う際の誤動作を防止した作業車両を提供する。
【解決手段】トラクタ10は、複数の作業機を接続可能である。また、トラクタ10は、通信制御ユニット36を備えている。通信制御ユニット36は、前記作業機と通信を行うことにより、当該作業機と連動した動作をトラクタ10に行わせることが可能である。そして、通信制御ユニット36は、各作業機とトラクタ10との前記連動の有無を設定可能であるとともに、当該設定を上書き可能である。
(もっと読む)
農作業機
【課題】トラクタに装着し農作業を行う作業機に有する出力機器の電源を作業機側から得られる農作業機を提供することを目的とする。
【解決手段】トラクタ1に装着する作業機2で農作業を行う農作業機において、作業機1以外の場所に無線で操作信号を送信する送信部12が配置され、作業機2には、出力機器40と、送信部12から無線による操作信号を受信する無線受信部21と、無線受信部21が受信した操作信号に基づき出力機器40を制御する制御部22と、少なくとも出力機器40の電源となる蓄電装置31とを備える。
(もっと読む)
農作業機用リモコン操作システム
【課題】部品の共通化が可能でかつシステムの変更を容易に行うことができるトラクタに装着する農作業機に備える出力機器を無線で操作するための農作業機用リモコン操作システムを提供することを目的とする。
【解決手段】トラクタに装着する農作業機に備える出力機器を無線で操作するための農作業機用リモコン操作システムであって、操作信号を無線送信可能な送信部10と、農作業機側に設置され送信部10からの無線信号を受信する受信部20と、農作業機側に設置され受信部20からの操作信号により出力機器を制御する制御部40と、受信部20と出力機器と制御部40とに接続される制御ハーネス30とを有し、受信部20と制御ハーネス30の間には、受信部20を脱着可能な接続部20aを具備する。
(もっと読む)
農作業機用無線受信制御装置及び農作業機用リモコン装置
【課題】無線受信制御装置の電源スイッチを入れたときにいきなり農作業機の動作が実行される可能性をなくし、安全性を高めることができる農作業機用無線受信制御装置及び農作業機用リモコン装置を提供する。
【解決手段】農作業機用無線受信制御装置70は、走行機体の後部に装着される農作業機に設けられ、農作業機の動作を指令する操作指令を無線信号によって指令するリモコン装置60からの信号を受信し、リモコン装置に返信の信号を送る通信手段と、通信手段によって受信された信号に従って農作業機の作動を制御する制御手段を備え、電源スイッチをオンしたときに、リモコン装置からの信号が受信圏内に存在するときには、自動的に制御手段への電力の供給を遮断する電源停止制御手段200aを備える。
(もっと読む)
農業機械の制御部適合性判定システムおよび農業機械の制御部適合性判定方法
【課題】制御部の動作規格を容易かつ適切に適合判定可能な農業機械の制御部適合性判定システムおよび、農業機械の適合性判定方法を提供する。
【解決手段】コントローラ(第1制御部)1Aとコントローラ(第2制御部)50Aとが最初に電気的に連結されたときに、コントローラ50Aが、コントローラ50Aに格納するロータリー耕耘機(第2作動部)50の固有情報である第2作動部情報をコントローラ1Aに送信して第2作動部初期情報として記憶する。そして、コントローラ1Aとコントローラ50Aとが電気的に切断された後、再び、コントローラ1Aとコントローラ50Aとが電気的に連結されたときに、コントローラ1Aがコントローラ1Aに格納されている第2作動部初期情報をコントローラ50Aに送信し、コントローラ50Aが、受信した第2作動部初期情報と第2作動部情報とを照合し、コントローラ1Aとコントローラ50Aとの適合性を判定する。
(もっと読む)
牽引作業機のヒッチ角センサ
【課題】オペレーターの運転の好みに合ったタイミングに調整して牽引作業機の方向変換戻し操作をできるようにしたヒッチ角センサを提供する。
【解決手段】ボルト通孔を貫設したカム本体22の円周側面に沿って横溝巾の異なる複数の直進スイッチ溝と各直進スイッチ溝に対応する左・右対の回行スイッチ溝を形成したセンサカム20をスイッチボックス18に回動可能に収納する。スイッチボックス18から突出させた前記カムセンサ20の回転軸に、カム本体22の各直進スイッチ溝に対応する複数の位置決め孔を穿孔した位置決めプレート28を供回り不能に嵌装する。ドローバーへの当接アームを有するL字形ドローバー連動部材21の水平プレート面にボルト孔を設け、前記位置決めプレート28の任意の位置決め孔に選択ボルトを介して選択的に結合する。ドローバー連動部材21の上方へ突出させたセンサカム20の支軸ボルトにナットを締め付け、一体結合する。
(もっと読む)
畦形成機
【課題】 畦形成部が180度回転すると、高さが変わってしまうことが多かった。
【解決手段】 トラクタに連結する装着フレーム1と、装着フレーム1に対して上下方向に回動可能に連結する作業部支持フレーム2と、作業部支持フレーム2に設けた第1回動中心部30を中心に水平方向に回動可能かつ伸縮可能な回動フレーム3と、回動フレーム3の回動端側に設けられる畦形成作業部4と、作業部支持フレーム2と回動フレーム3との間に架設され作業部支持フレーム2に設けられる第1回動中心部30よりトラクタ側に位置する第2回動中心部50を中心に回動する回動ロッド5とを有し、畦形成作業部4は、第2回動中心部50を中心に水平方向に回動する回動ロッド5の回動軌道にしたがって回動する畦形成機による。
(もっと読む)
1 - 8 / 8
[ Back to top ]