
国際特許分類[B60K28/02]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両の推進装置または動力伝達装置の配置または取付け;複数の異なった原動力の配置または取付け;補助駆動装置;車両用計装または計器板;車両の推進装置の冷却,吸気,排気または燃料供給に関する配置 (25,396) | 車両に特に適合されまたは配置される推進装置制御用の安全装置,例.潜在的な危険状態時の燃料供給または点火の阻止 (510) | 運転者に関する状態に応じるもの (332)
国際特許分類[B60K28/02]の下位に属する分類
国際特許分類[B60K28/02]に分類される特許
21 - 30 / 31
走行制御装置
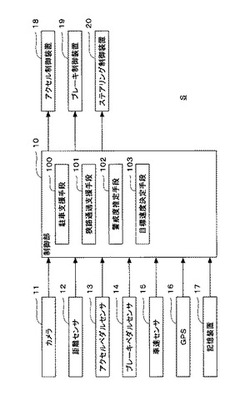
【課題】運転者に不快感を与えることなく車輌を緩速走行させる走行制御装置を提供すること。
【解決手段】算出した走行軌跡に沿って車輌を目標速度で緩速走行させる走行制御装置Sは、緩速走行に対し運転者が抱く警戒度を推定する警戒度推定手段102と、警戒度推定手段102の推定結果に基づいて目標速度を決定する目標速度決定手段103と、を備える。また、走行制御装置Sは、駐車支援又は狭路通過支援に利用され、警戒度推定手段102は、算出した走行軌跡に沿って車輌を走行させた場合における周辺物と車輌との間の距離に基づいて警戒度を推定する。
(もっと読む)
人の状態推定装置及び人の状態推定方法

【課題】人の状態を高精度に推定する人の状態推定装置及び人の状態推定方法を提供することを課題とする。
【解決手段】被験者の状態を推定する人の状態推定装置1であって、被験者の状態変化量に対応する第1指標値を取得する第1指標値取得手段3,4,7と、被験者の状態を推定するときの第1指標値の加味度合いを定めるゲインを設定するゲイン設定手段7と、ゲインに応じて第1指標値の加味度合いを規定し、当該ゲインに応じた加味度合いの第1指標値と過去の被験者の状態に基づいて被験者の状態を推定する状態推定手段7とを備えることを特徴とする。
(もっと読む)
車両
【課題】要求された旋回目標と実際の旋回限界を把握し、該旋回限界に対応した、より少ない制限量(旋回目標にできるだけ近い状態)で旋回する。
【解決手段】車両全体の重心位置を推定し、その重心位置に応じた限界横方向加速度alim(=aMin、aMax)を求め、搭乗者が要求する目標走行状態(V*、γ*)から求めた横方向加速度a*が、限界横方向加速度alimを超えない範囲で旋回走行を行う。すなわち、限界横方向加速度alimを超えない目標走行状態が搭乗者によって入力された場合には、その目標走行状態で旋回走行する。一方、限界横方向加速度alimを超える目標走行状態が入力された場合には、横方向加速度a*=限界横方向加速度alimとなるように、現実目標走行状態(V*〜、γ*〜)に制限する。これにより、旋回速度と旋回曲率を必要以上に制限しないので、車両の旋回性能を限界まで最大限利用することができる。
(もっと読む)
運転者心理判定装置
【課題】運転者の心理状態を高精度に判定する運転者心理判定装置を提供することを課題とする。
【解決手段】運転者の心理状態を判定する運転者心理判定装置1であって、先行車の存在を検出する先行車検出手段10と、自車の走行状態を検出する走行状態検出手段11と、先行車が存在する場合の自車の走行状態と先行車が存在しない場合の自車の走行状態との比較に基づいて運転者の心理状態を判定する運転者心理判定手段31とを備えることを特徴とする。
(もっと読む)
車両制御装置
【課題】取得した生体情報に基づいて、より正確な必要性判断のもと運転支援を行う。
【解決手段】心拍等の生体情報が所定の閾値(基準値)を越えたかい否かを、警告や車両制御等の運転操作支援を行うか否かを判断するための条件とし、この生体情報の閾値を、同乗者の有無に応じて変更する。これにより、従来よりも、より正確な運転者支援を行うことができるようになる。
すなわち、一人で運転している時と、隣に上司などの普段から緊張する相手が同乗している場合とでは、通常時の生体情報が異なるため、同じ閾値で判定できない。
そこで、同乗者によって緊張度が増している場合は、その緊張度を踏まえて閾値を設定し、運転操作に対する緊張度を検出しやすくする。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備える車両
【課題】
運転者に対して常にアクセルペダル反力を用いた情報伝達を行う車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、自車両の車両状態および走行環境に基づいて先行車に対するリスクポテンシャルを算出し、算出したリスクポテンシャルに応じた操作反力をアクセルペダルに発生させることにより、自車両のリスクポテンシャルを運転者に伝える。アクセルペダル反力を用いた情報伝達を行う場合は運転者の足とアクセルペダルとが接している必要があるので、運転者の体格に応じてアクセルペダルの初期位置をオフセットすることにより、アクセルペダルの遊び領域を拡張する。
(もっと読む)
運転行動認識装置
【課題】 道路形状の影響を受けることなく、運転行動を高精度に認識する。
【解決手段】操舵角の対数スペクトルは、同一の運転行動(実線又は点線)であっても、道路の形状が異なるとその道路形状の変化の影響を受けてしまい、ばらつきが大きくなる((a)参照。)。これに対して、操舵角の対数スペクトルの包絡は、同一の運転行動であれば、道路形状が異なってもほぼ一致する。つまり、上記包絡は、道路形状に影響されることなく、各々の運転行動パタンを表現することができる((b)参照。)。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
運転者の車線変更意図が検出された際に自車両とレーンマーカとの相対位置関係に応じたアクセルペダル反力制御を行う車両用運転操作補助装置を提供する。
【解決手段】
コントローラは、自車両周囲の走行状況に基づいてリスクポテンシャルを算出し、リスクポテンシャルに応じたアクセルペダル反力を算出する。ウィンカ操作等によって運転者の車線変更意図が検出されると、スムーズな加速を実現するようにアクセルペダル反力を低下させる。このとき、自車両が車線変更方向の車線端付近を走行している場合は、アクセルペダル反力がいっそう速やかに低下するように再度補正を行う。
(もっと読む)
速度制御装置及び速度制御装置を備えた車両
【課題】 運転者の生理状態を判断して車両の速度を的確な速度に減速できる速度制御装置及び速度制御装置を備えた車両を提供すること。
【解決手段】 運転者の生体情報を入力する入力手段4と、入力された生体情報からノイズ成分を除去するノイズ除去手段5と、ノイズ成分が除去された生体情報を増幅する増幅手段6とを有する生体情報取得手段2と、生体情報取得手段2が取得した生体情報から生理状態を算出する算出手段7と、算出した生理状態を記憶する記憶手段8と、記憶された生理状態が正常な整理状態か否かを判定する生理状態判定手段9と、車両20の速度を検出する速度検出手段11と、生理状態判定手段9の判定結果と速度検出手段11の検出した速度に基づいて車両20の速度を制御する速度制御判定手段10とを有する速度制御手段3とを備える。
(もっと読む)
車両のための操作方法
車両の操作方法に際して、ドライバーの健康状態が検出され、対応する信号が出力される。本発明に係る方法では、いつでも作動可能な装置が車両に備えられ、当該装置を用いてドライバーや他の乗員の身体コンディションが積極的に影響を与えられ得、及び/又は発生するストレスに反対作用し得るものである。 (もっと読む)
21 - 30 / 31
[ Back to top ]