
国際特許分類[B60W30/14]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407) | クルーズコントロール (995)
国際特許分類[B60W30/14]の下位に属する分類
国際特許分類[B60W30/14]に分類される特許
101 - 110 / 352
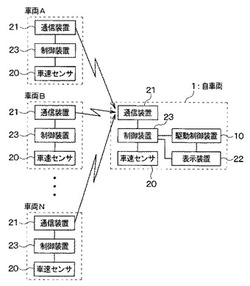
運転支援システム
【課題】よりエネルギー消費の少ない走行制御を行う。
【解決手段】自車1の走行時における車速情報を収集し、通信装置21を介して自車1と同一方向に走行中の周辺車両A〜Nから各車両の車速情報を取得するとともに、当該各車両の車速の平均値を算出し、自車1の車速と周辺車両A〜Nの車速の平均値との差異に基づいて自車1が周辺車両A〜Nに対して必要以上の加減速を実施したことを判定した場合、駆動制御装置10に加速を制限するように指示する。
(もっと読む)
車両走行制御装置

【課題】運転者の意図に沿った車両の走行制御が可能な車両走行制御装置を提供する。
【解決手段】車両走行制御装置は、車両の現在地から目的地までの走行ルートR1を複数の走行区間r11〜r14に任意に分割し、その分割した各走行区間r11〜r14に対して走行制御用パラメータを設定し、車両Sが走行区間r11〜r14に進入した場合に、走行区間r11〜r14に対して設定されている走行制御用パラメータに基づいて車両の走行を制御する。
(もっと読む)
運転支援装置
【課題】運転支援の機能を運転者が適切に利用することができる運転支援装置を提供すること。
【解決手段】本発明に係る車両の制御により運転者の運転を支援する運転支援装置は、運転支援制御中における運転者の操作介入に基づいて、運転支援制御を制限する運転支援制限手段と、運転支援制御の信頼度を検出する信頼度検出手段と、信頼度に応じて運転支援制限手段の作動条件を変更する作動条件変更手段と、を備えることを特徴とする。
(もっと読む)
速度制限制御装置、速度制限制御方法及び速度制限制御プログラム
【課題】センサ情報の誤差が生じることを考慮してエリア退場の判断を行う速度制限制御装置を提供することにある。
【解決手段】速度制限制御装置は、車両の現在位置情報と、保持しているエリア情報の入場用エリア範囲情報とを用いて、エリアに入場しているか否かを判断し、速度制限制御装置を搭載している車両が、エリアに入場した後に、エリア入場後の現在位置情報と、入場用エリア範囲情報を広げた範囲の退場用エリア範囲情報とを用いて、エリアから退場したか否かを判断し、エリアの入退場の状態によって速度制御の状態を変更している。速度制限制御装置は、エリア退場用の範囲情報を、エリア入場用の範囲情報に比して広く設定しているので、タイヤのスリップ等により現在位置情報に誤差が生じていても適切にエリアから退場したか否かを判断することができる。
(もっと読む)
車両用運転支援装置および車両用運転支援方法
【課題】オートクルーズ制御がオンの状態で、ブレーキ操作を行わなくてもカーブ路を走行できるか否かの情報をユーザに提供する。
【解決手段】道路情報を取得し、取得した道路情報、および、定速走行制御時の一定速度に基づいて、定速走行制御中に一定速度でカーブ路を走行する際に必要となる必要旋回ヨーモーメントを算出するとともに、定速走行制御中に一定速度でカーブ路を走行する際に、車両が走行可能な限界ヨーモーメントを算出する。そして、車両がカーブ路に進入する前に、必要旋回ヨーモーメント65および限界ヨーモーメント64を、表示装置に表示させる。
(もっと読む)
車両用加減速制御装置及びその方法
【課題】ナビゲーションシステムによる経路誘導の終了によりカーブ手前で減速制御が終了する場合でも、該カーブに対して有効に減速させる。
【解決手段】車両用加減速制御装置は、ナビゲーション装置14による車両の経路誘導時に、その誘導経路を基に、車両前方のカーブを検出するナビゲーション情報処理部43と、ナビゲーション情報処理部43が検出したカーブに対応して車両を減速制御する目標車速演算部42等と、車両からみてナビゲーション装置14の経路誘導終了地点よりも遠方に制御対象のカーブが存在するときには、減速制御の制御内容を、該経路誘導終了地点に対応したものに変更する目標車速指令値演算部45と、を備える。
(もっと読む)
車両走行支援制御方法および装置
【課題】
車両の走行中に有している運動エネルギーを最大限に活用することによって車両走行に必要なエネルギーおよび排出ガス量を削減する。
【解決手段】
走行経路中の停止点S0、S1、・・・Sn、Sn+1、・・・及びその停止順序をあらかじめ設定し、設定された停止点Sn およびSn+1 間の車両走行距離距離Dn+1 および前記停止点Sn からの走行距離ΔD から、現時点から次に停止すべき地点Sn+1 までの残距離Dr =(Dn+1−ΔD)を算出し、前記残距離Dr が現時点での走行速度vで惰性走行に移行した場合、次に停止すべき地点Sn+1 に惰性走行で到達可能な距離か否かを判定し、到達不可と判定した場合は現時点まで行ってきた加速走行あるいは定速走行を継続し、その後一定時間あるいは一定走行距離走行後改めて前記惰性走行可否の判定を行う。到達可能と判定した場合は惰性走行に移行して次に停止すべき地点Sn+1まで走行する。
(もっと読む)
ハイブリッド自動車のオートクルーズ制御装置及び車両の自動制動制御装置
【課題】ハイブリッド自動車のオートクルーズ制御装置及び車両の自動制動制御装置に関し、減速制御時における段付き感を解消しドライブフィーリングを向上させる。
【解決手段】車両の走行速度Vを車速検出手段2で検出し、これを巡航速度V0にするのに要求される要求制動力Fを要求制動力算出手段1aで算出する。
また、電動発電機の回生制動により所定の最大制動力を上限として任意の大きさの制動力を発生させる回生ブレーキ手段3と、不連続な大きさの所定制動力FBを段階的に発生させる補助ブレーキ手段4とを設ける。
制動制御手段1cにおいて、回生ブレーキ手段3及び補助ブレーキ手段4による制動制御を重複させるに際し、要求制動力Fが予め設定された第一所定値F1以上である場合には、補助ブレーキ手段4で所定制動力FBを発生させるとともに要求制動力Fから所定制動力FBを減じた大きさの制動力を回生ブレーキ手段3に負担させる。
(もっと読む)
目標駆動制御量設定算出装置、車両走行システム、目標駆動制御量設定方法
【課題】運転者によるアクセルペダルの操作を反映でき、ドライバビリティーの低下を抑制することができる目標駆動制御量設定算出装置、車両走行システム、目標駆動制御量設定方法を提供すること。
【解決手段】車両に作用させる駆動力を制御するパラメータである目標駆動制御量を設定する目標駆動制御量設定方法において、運転者によるアクセルペダルの操作に基づいたペダル物理量を取得し、取得されたペダル物理量に基づいてアクセルペダルの操作に基づいた駆動力変化量Δαを算出し(ST3,4)、運転者によるアクセルペダルの操作に拘わらず車両の走行状態に基づく走行状態物理量を所定値に維持するための駆動制御量である維持要求駆動力Fhを算出し、駆動力変化量Δαと、維持要求駆動力Fhとに基づいて、目標駆動力Foを算出する(ST5〜10)。
(もっと読む)
車両クルーズコントロールを制御する方法及び装置
本発明は、車両(1)における車両クルーズコントロールを制御する方法及び装置であって、前記車両の可能な走行ルートについて出発地点と最終目的地を記録するステップと;前記走行ルートについての所望の走行時間を記録するステップと;可能な限り低い燃料消費量で、所望の走行時間に前記最終目的地に到着するように、前記クルーズコントロールのパラメーターについての制限値を計算し、設定するステップとを含む。 (もっと読む)
101 - 110 / 352
[ Back to top ]