
国際特許分類[B60W30/14]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407) | クルーズコントロール (995)
国際特許分類[B60W30/14]の下位に属する分類
国際特許分類[B60W30/14]に分類される特許
61 - 70 / 352
車両用運転支援装置
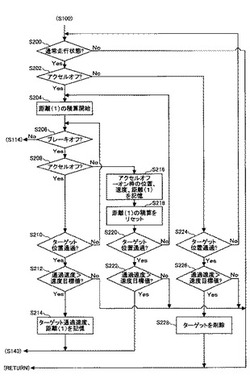
【課題】運転者の運転感覚に合致した最適な自動減速制御を行なうことが可能な車両用運転支援装置を提供すること。
【解決手段】車両が特定の位置を走行する際に自動減速制御を行なう制御手段を備える車両用運転支援装置であって、運転者のアクセル操作を検出するアクセル操作検出手段と、前記運転者のブレーキ操作を検出するブレーキ操作検出手段と、を備え、前記制御手段は、前記アクセル操作検出手段及び前記ブレーキ操作検出手段の検出結果を参照して前記運転者が一連の特定操作を行なったと判定した場合に、該一連の特定操作に含まれる操作の行なわれたタイミングを学習し、該学習したタイミングに基づいて、前記自動減速制御の制御区間を決定することを特徴とする、車両用運転支援装置。
(もっと読む)
車両制御装置

【課題】プログラムの更新を早期に行える車両制御装置を提供すること。
【解決手段】車両の制御部3におけるプログラム更新を行う車両制御装置であって、制御部3のプログラム更新が必要か否かを判断し(S12)、プログラム更新が必要である場合に車両の走行時において制御部3の制御処理が行われないか否かを判断し(S20)、制御部3の制御処理が行われないと判断された場合に車両走行時に制御部のプログラム更新を実行する(S22)。これにより、車両走行時であっても不適切な制御が行われることを回避しつつ、早期にプログラム更新が行える。
(もっと読む)
補助動力装置付き二輪車
【課題】加速度センサを用いることなく適切な駆動力によるクルーズ走行を可能とする補助動力装置付き二輪車を提供する。
【解決手段】制御部46は、検知されたペダル踏力のピーク値に対応する目標車速MTが保持または漸減されるように駆動モータ24を駆動するクルーズ走行を実行すると共に、車速センサ37により検知される現在車速Vと目標車速MTとの対応関係に基づいて路面の勾配状態を判定し、該勾配状態に応じてクルーズ走行中に目標車速MTの更新を行う。目標車速の更新は、クルーズ走行中に、先に設定された目標車速MT1に対して現在車速Vが所定値以上減少すると、現在車速Vを新たな目標車速MT2,3とすることで実行される。一方、クルーズ走行中に、先に設定された目標車速MT3に対して現在車速Vが所定値以上増加すると、現在車速Vより所定割合だけ小さい車速を新たな目標車速MT4,5とする。
(もっと読む)
車両制御装置
【課題】ドライバの意図に沿った走行状態を実現する車両制御装置を提供する。
【解決手段】先行車に対して追従制御を行う車間距離制御または設定された速度に収束するように定速走行を行う定速走行制御を備えた車両制御装置において、ドライバのブレーキ操作状態を検出するブレーキ操作状態検出装置と、車間距離制御又は定速走行制御を実施中にブレーキ操作が検出されると、ブレーキ操作状態に応じた減速を行う減速制御部と、ブレーキ操作の終了が検出されると加速方向の制御をキャンセルする加速制御制限部とを有するコントロールユニットを備えた。
(もっと読む)
制御要求調停装置
【課題】設計効率の高い制御要求調停装置を提供する。
【解決手段】制御プラットフォーム10では、位置制御要求調停部21が、位置を次元とする複数の制御要求を調停して出力し、位置制御要求変換部22が、位置制御要求調停部21からの制御要求を速度を次元とする制御要求に変換して出力する。そして、速度制御要求調停部31が、速度を次元とする複数の制御要求を調停して出力し、速度制御要求変換部32が、速度制御要求調停部31からの制御要求を加速度を次元とする制御要求に変換して出力する。さらに、加速度制御要求調停部41が、加速度を次元とする複数の制御要求を調停して出力し、加速度制御要求変換部42が、加速度制御要求調停部41からの制御要求を加速度制御を実現する制御装置に応じた次元(例えばトルク)の制御要求に変換して出力する。
(もっと読む)
車両走行制御方法
【課題】車両の省エネルギー走行のための実走行条件に即した惰性走行減速度の計測方法、および前記計測方法によって計測された惰性走行減速度を基準としての有効な等減速度走行実行可否判定方法あるいは等減速走行実行方法の提案。
【解決手段】
車両が惰性走行の間の一定時間毎あるいは一定距離走行毎に周期的に惰性走行減速度の計測を行い、前記計測によって得られた最新の惰性走行減速度を用いて、現地点・現時点から減速走行終了点までの等減速度走行による到達可否判定および等減速度走行制御、あるいは前方車両への追従走行移行可否判定および追従走行制御、を行う。
【選択図】 図1  (もっと読む)
(もっと読む)
油圧無段変速機付き自走式車両
【課題】所望の位置でアクセルを保持することのできるクルーズコントロール機構を備える油圧無段変速機付き自走式車両を提供する。
【解決手段】HST(油圧無段変速機)1と、回動させることによってHST1の変速操作をする前進アクセルペダル(変速操作部材)28と、前進アクセルペダル28の回動位置を保持するクルーズコントロール機構30とを有するHST付きトラクタ(自走式車両)21において、クルーズコントロール機構30が摩擦部材30hを備え、摩擦部材30hによって前進アクセルペダル28の回動位置を保持する。
(もっと読む)
無人車両遠隔操作システム
【課題】操作者の意図した通りの高速走行を、安全に行うことができるようにする。
【解決手段】本発明は、走行領域内の測距データを取得するための測距部により取得した測距データに基づいて、走行可能エリアを抽出するエリア抽出手段10aと、無人車両の走行状態を取得する走行状態取得手段10bと、取得した無人車両の走行状態と、抽出した走行可能エリアとに基づいて、走行のための操作限界を示す操作限界情報を生成する操作限界情報生成手段10cとを無人車両に設ける一方、生成した操作限界情報を表示部に表示させる操作限界情報表示手段を遠隔操作装置に設けている。
(もっと読む)
半自律型無人車両の遠隔操縦システム
【課題】操縦者の意図した通りの高速走行を、安全に行うことができるようにする。
【解決手段】測距データに基づいて走行可能エリアを抽出するエリア抽出手段10aと、走行状態を取得する走行状態取得手段10bと、走行状態と走行可能エリアとに基づき、操縦限界を示す操縦限界情報を生成する操縦限界情報生成手段10cと、操縦限界情報を遠隔操縦装置に向けて送信する操縦限界情報送信手段10dと、操縦限界情報に基づき制限され、かつ、遠隔操縦装置から送出された操縦情報に従い、半自律型無人車両を走行させる自律走行手段10eとを半自律型無人車両に設けたこと、操縦限界情報を表示部に表示させる操縦限界情報表示手段と、操縦限界情報に基づき制限された操縦情報を生成する操縦情報生成手段と、電気通信回線を通じ、生成した操縦情報を半自律型無人車両に向けて送信する操縦情報送信手段とを遠隔操縦装置に設けている。
(もっと読む)
車両走行制御方法
【課題】
「交差点無停止走行制御システム」における地点P通過前後の車両走行速度差に起因する走行安全・渋滞問題の解決、及び地点P−交差点A間走行時の車両運動エネルギーの効率的利用方法、回生方法の提案。
【解決手段】
車両の地点P通過実車両走行速度 vs 、地点P−交差点A間車両走行距離D、交差点A信号状態情報、地点P通過時刻 tp 、から交差点A到着予定時刻 ta を算出し、地点P−交差点A間を等加速度走行して前記交差点A到着予定時刻 ta に交差点Aに到着するための加速度αを算出して加速度αでの定加速度走行で、但しα<0(減速度走行)の場合は惰性走行を行い惰性走行に余る運動エネルギー分は回生ブレーキの調整による減速度αでの定減速度走行で、交差点Aに向けて走行し交差点Aを青信号・無停止で通過する。
(もっと読む)
61 - 70 / 352
[ Back to top ]