
国際特許分類[B60W30/14]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407) | クルーズコントロール (995)
国際特許分類[B60W30/14]の下位に属する分類
国際特許分類[B60W30/14]に分類される特許
41 - 50 / 352
車両用定速走行制御装置
【課題】定速走行制御中、駆動力飽和状態でのダウンシフト時におけるシフトショックを抑制しつつ、ダウンシフト後の目標車速への追従性を確保することができる車両用定速走行制御装置を提供する。
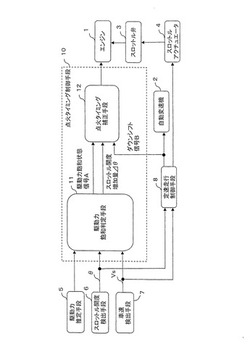
【解決手段】車両に搭載されたエンジンの点火タイミングを制御する点火タイミング制御手段と、エンジンのスロットル弁の開度を検出するスロットル開度検出手段と、スロットル開度の所定以上の増加時にダウンシフトさせる変速制御手段と、スロットル開度を制御して車速が目標車速と一致するように車両を定速走行させる定速走行制御手段とを備え、点火タイミング制御手段は、スロットル開度と車速にもとづいて定速走行制御中に駆動力が増加不可となる飽和状態を判定して判定信号を出力する駆動力飽和判定手段と、判定信号にもとづいてダウンシフト実行時に通常のダウンシフト時の遅角補正に対し所定の遅角補正量を加算する点火タイミング補正手段とを備えた構成。
(もっと読む)
車両走行制御システム

【課題】複数の曲線区間を有する走路において運転者の感覚に沿った車両の走行状態の制御が可能な車両走行制御システムを提供すること。
【解決手段】車両の走行状態を変更する走行状態変更手段と、コーナに応じて走行状態変更手段を制御する制御装置とを備え、制御装置は、直線路とみなす区間と、直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、運転者による走行履歴に基づき、二つの曲線区間の一方から他方に向けて直線路とみなす区間を走行する間に車両の挙動が安定すると予測される場合(S5−Y)には二つの曲線区間を互いに独立したコーナとして走行状態変更手段を制御し(S6〜S9)、走行履歴に基づき、直線路とみなす区間を走行する間に車両の挙動が安定すると予測されない場合(S5−N)には二つの曲線区間および直線路とみなす区間を一つのコーナとして走行状態変更手段を制御する(S10,S11)。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
走行制御装置
【課題】自車両の前方に加速や減速が必要となる走行環境がある場合におけるドライバの操作負担を軽減することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず自車両の前方に加速が必要となる走行環境があるかどうかを判断し、加速が必要となる走行環境がないときは、アクセルをOFF操作した時点における自車両の速度に応じて定速走行を行うように制御し、加速が必要となる走行環境があるときは、自車両を所定の加速度で加速させるように制御する。そして、走行制御装置は、ブレーキがON操作されると、自車両の加速動作を解除するように制御し、その後ブレーキをOFF操作した時点における自車両の速度に応じて定速走行を行うように制御する。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、変速操作のためにクラッチの切断操作等が行われたときに、エンジン回転数が吹き上がることを防止する。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつオートクルーズ制御手段が備えられた車両において、前記オートクルーズ制御手段によるオートクルーズ制御中に、クラッチの切断操作等の動力遮断操作が行われたときに、該操作の直前の状態から手動変速機の変速段を一段シフトアップさせたときのエンジン回転数を目標回転数に設定し、この目標回転数に一致するようにエンジン回転数を制御するエンジン制御手段を備える。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、前記変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときのブレーキ制御を運転者の要求に適合させるように行うことを課題とする。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつエンジンの駆動制御とブレーキの制動制御とでオートクルーズ制御を行う車両において、前記制動制御が行われている状態で、エンジンから駆動輪への動力伝達を遮断する動力遮断操作が行われ、この状態で前記手動変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときに、該アクセルペダルの踏み込み量が所定値より大きいときは前記制動制御を解除し、該アクセルペダルの踏み込み量が前記所定値より大きくないときは前記制動制御を継続する制動制御手段を備える。
(もっと読む)
車両制御装置
【課題】車速制御中にドライバがブレーキ操作を行ったときに受ける違和感を防止する車両制御装置を提供することを課題とする。
【解決手段】自車両の車速を制御する車両制御装置であって、自車両のドライバのブレーキ操作を検出するブレーキ操作検出手段と、車速制御中に自車両のドライバがブレーキ操作を行ったときに当該ブレーキ操作における踏力が閾値以下の場合に車速制御の解除を禁止し、通常の車速制御とは異なるブレーキ操作時の車速制御に切り替え、自車両のドライバがブレーキ操作を終了した場合にブレーキ操作時の車速制御から通常の車速制御に切り替える制御切替手段を備えることを特徴とする。
(もっと読む)
運転支援装置
【課題】目標走行パターンを用いた運転支援において運転者の受ける違和感を抑制する運転支援装置を提供することを課題とする。
【解決手段】走行予定経路の先読み情報に基づいて走行予定経路における目標走行パターンを設定し、当該目標走行パターンに追従するように運転支援を行う運転支援装置1であって、運転者の運転操作の履歴に基づいて運転支援を行うことを特徴とし、運転者の運転操作の履歴に基づいて運転支援制御のON/OFFを切り替えたり、あるいは、運転者の運転操作の履歴に基づいて目標走行パターンを設定する。
(もっと読む)
車両制御システム
【課題】所定走行制御によって燃費を向上させることが可能な車両制御システムを提供すること。
【解決手段】車両の動力源としてのエンジンを備え、エンジンの出力する動力により車両を加速させる加速走行とエンジンの出力する動力によらずに惰性によって車両を走行させる惰性走行とを交互に行って所定の速度域内で車両を走行させる所定走行制御(S4)を実行可能であり、所定走行制御を実行する(S1−Y)場合、惰性走行において車両に発生すると予測される減速度(S2)あるいは惰性走行において車両に発生した減速度の少なくともいずれか一方に基づいて、加速走行において車両に発生させる加速度を決定する(S3)。
(もっと読む)
車両の制御装置
【課題】目標車速への追従性を犠牲にすることなく減速時の車速のアンダーシュートを抑制し、走行フィーリングの悪化を防止する。
【解決手段】減速燃料カットによって実車速が低下し、実車速と目標車速との偏差が車速差ΔVになったとき、目標車速を初期値として疑似目標車速を設定する。そして、演算周期毎に、実車速を上回らない範囲で疑似目標車速を増加させていく。このとき、疑似目標車速の増加に伴って、要求加速度が極小値から減速燃料カットからの復帰に必要な加速度に向かって増加していく。減速燃料カットからの復帰後は、疑似目標車速を徐々に目標車速に近づけていき、要求加速度を等速運動に必要な加速度(加速度=0)に向かって増加させる。これにより、目標車速への追従性を犠牲にすることなくアンダーシュートを抑制しつつ実車速を目標車速に一致させることができる。
(もっと読む)
41 - 50 / 352
[ Back to top ]