
国際特許分類[B60W30/14]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407) | クルーズコントロール (995)
国際特許分類[B60W30/14]の下位に属する分類
国際特許分類[B60W30/14]に分類される特許
81 - 90 / 352
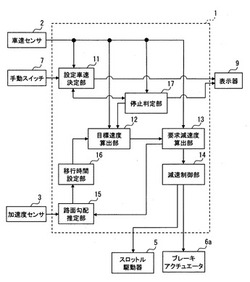
車両用速度制御装置
【課題】目的とする車速に向けて車速を低下させる場合に、運転者にとって操作の煩わしさや操作のしにくさをより生じにくくすることを可能にする。
【解決手段】車両の運転者からの操作入力を受けてON状態に切り替わったことを示す手動スイッチ信号を出力する手動スイッチ7と、手動スイッチ信号に従って、現在の設定車速から所定の量の速度を減じた新設定車速を算出する設定車速決定部11と、一定時間をかけて現在の設定車速から新設定車速へ移行するために逐次とるべき目標速度を算出する目標速度算出部12と、目標速度と現在車速との差をもとに、目標速度を実現するために必要な減速度である要求減速度を算出する要求減速度算出部13と、を備え、逐次算出される要求減速度に従った減速度で逐次減速を行わせていくことによって新設定車速に自車速を合わせる。
(もっと読む)
トラクタ

【課題】本発明では、作業中のエンジン回転数を負荷変動に応じて素早く最適燃費ラインの回転数に近づけるようにすることで、燃料消費量が少ないトラクタの走行制御装置を提供することを課題とする。
【解決手段】アクセルレバー33或はアクセルペダル34の開閉度合いを検出するスロットルセンサ20と、エンジン2の出力軸の回転数を検出するエンジン回転センサ22を設けると共に、前記スロットルセンサ20の検出開度に応じた最適回転数を制御装置40に記憶し、前記エンジン回転センサ22が検出するエンジン回転数とスロットルセンサ20の検出開度に応じた最適回転数の差を所定範囲に収めるように、エンジン回転制御部27と主変速制御部28とPTO変速制御部29を制御するように構成したことを特徴とするトラクタの構成とする。
(もっと読む)
走行制御装置
【課題】 渋滞時における加減速の抑制が図られた走行制御装置を提供する。
【解決手段】
本発明に係る走行制御装置1において、ECU2は、平均速度算出手段として、通信部4を介して自車の前方を走行している複数の前方走行車両の速度を取得し、それらの平均速度を求める。また、ECU2は、制御速度決定手段として、求めた平均速度に応じて、自車の制御速度を決定する。そのため、ECU2は、走行駆動部6や制動部7に対して所定の信号を送り、決定した制御速度での定速走行を自車におこなわせることができる。したがって、自車Nは直前の車両のみに追従するような加減速走行はせずに、複数の前方走行車両の平均速度に応じた制御速度で定速走行するため、加減速が抑制され、燃費の向上や渋滞解消の促進が図られる。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に違和感の少ない支援を行うことでドライバビリティの向上を図る。
【解決手段】車両に作用する力を調整して車両の走行を制御可能に構成し、車両の走行状態に応じて車両に作用する力を調整する作用力調整手段と、ドライバが車両の走行を操作する操作部材の操作状態を検出する操作状態検出手段と、操作部材の操作状態に応じて作用力調整手段による調整度合を変更する調整度合変更手段とを設ける。
(もっと読む)
走行支援装置
【課題】自動走行とドライバの操作に基づいて走行を行う手動走行との切換を適切に行うことが可能な走行支援装置を提供する。
【解決手段】走行支援装置1は、ドライバの操作に基づいて走行を行う手動走行と、自動制御により走行を行う自動走行とを切換可能な車両の走行支援装置であって、車両をあらかじめ入力された目的地まで自動走行させる。走行支援装置1は、自動走行の起動からの経過時間に従って自動走行の解除方法が異なる運転制御部を備えている。
(もっと読む)
作業車の走行制御装置
【課題】本発明は、トロイダル変速機構を搭載した作業車で、変速比を一定にして走行を維持する定車速モードで走行している場合に、旋回操作を行えば急激な走行速度の低下を防止して速やかな旋回を行わせ、作業能率を低下させない作業車を提供することが課題である。
【解決手段】エンジンEが適宜回転数でトロイダル変速機構4の変速比を一定に固定して走行する定車速モードと左右走行装置8の旋回角を検出する旋回角検出手段130を設け、設定速度を定速度T1に設定して定車速モードで走行中に旋回を行うときにおいて、旋回内側のブレーキ作動が始まる直前の前旋回角αで設定速度を増速度T2に変更し、旋回内側のブレーキ作動が終了する直前の終旋回角βで設定速度を元の定速度T1に変更するように制御してなる作業車の走行制御装置の構成とする。
(もっと読む)
車両用無段変速機の制御装置
【課題】ドライバビリティの低下を抑えつつクルーズ制御中の燃費を向上させる車両用無段変速機の制御装置を提供する。
【解決手段】クルーズ制御中、燃費の向上を意図する所定の操作が行われた場合には、目標車速VAIMを基準とする所定の速度範囲内で車速Vが加速及び減速を交互に繰り返すようにベルト式無段変速機18の変速比γを制御すると共にエンジン12への燃料の供給を制御するものであることから、運転者が燃費の向上を意図する操作を行った場合には目標車速VAIMと実際の車速Vの乖離をある程度許容してフューエルカット制御を行う一方、そのフューエルカット制御中はベルト式無段変速機18のアップシフトを行い減速度を抑えることで、フューエルカットに入る時間を延長して燃費を向上させると共にドライバビリティの低下を抑制することができる。
(もっと読む)
車両の運転支援装置
【課題】道路の状況に応じて適切にオートクルーズコントロールを実施することができる運転支援装置を提供する。
【解決手段】少なくとも1つの駆動源により走行可能な車両の運転支援装置は、自車両の現在位置に基づく走行区間情報を取得する走行区間情報取得部と、前記走行区間情報に対応する他車両の走行情報を取得する他車両情報取得部と、前記他車両の走行情報に基づいて判定値を設定する判定値設定部と、前記判定値に基づいてオートクルーズコントロールの実施を判定するオートクルーズコントロール実施判定部と、を備える。
(もっと読む)
車両制御装置
【課題】通常の全閉位置からさらに閉じ方向に過回動可能なアクセルグリップを構成するとともに、アクセルグリップの過回動を検知してクルーズコントロール制御を自動的に解除可能な車両制御装置を提案する。
【解決手段】車両制御装置21は、アクセルグリップ23と、アクセルグリップ23を周方向一方側に回動付勢するアクセル戻しスプリング54と、アクセル戻しスプリング54に抗してアクセルグリップ23の回動を規制し、所定の開度に位置させるとともに、アクセルグリップ23に周方向一方側へ向かう所定以上の操作力が負荷されるとアクセルグリップ23の規制が解除され、アクセルグリップ23を所定の開度を越えて周方向一方側へ過回動可能なアクセルグリップ過回動機構部55と、を備える。
(もっと読む)
走行軌跡演算装置、および、走行軌跡演算方法
【課題】速度パターンを固定化することなくエンジン特性の不連続性に基づくローカルミニマム問題を回避して、燃費等に関して全体最適化を図ることができる、走行軌跡演算装置、および、走行軌跡演算方法を提供することを課題とする。
【解決手段】本発明は、道路情報を記憶し、記憶した道路情報に基づいて道路上を車両が走行する場合の走行状態を予測し、予測された走行状態に基づいて、道路を複数の道路区間に分割し、道路区間毎に評価関数を設定し、道路区間毎に設定された評価関数に基づいて、道路上を走行する車両の走行軌跡を演算することを特徴とする。
(もっと読む)
81 - 90 / 352
[ Back to top ]