
国際特許分類[B60W30/14]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407) | クルーズコントロール (995)
国際特許分類[B60W30/14]の下位に属する分類
国際特許分類[B60W30/14]に分類される特許
51 - 60 / 352
支援制御装置
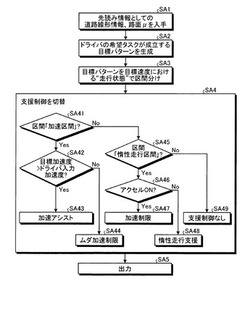
【課題】走行計画に基づく車両制御とドライバの操作とをより一層効率的に協調させることができ、その結果、走行計画をより一層高い達成度で達成することができる支援制御装置を提供することを課題とする。
【解決手段】車両に搭載されたECUは、生成した燃費向上を達成可能な目標速度パターンに対して、“加速区間”と“惰性走行区間”の2つの区間を定義し、定義した各々の区間に応じて、燃費向上を達成可能な支援制御を実施する。
(もっと読む)
ハイドロプレーニングを自動的に防止する方法
本発明は、走行区間において自動車の走行作動中にハイドロプレーニングを自動的に防止する方法に関し、本発明によれば、
a)ハイドロプレーニングの危険に関して区間部分に関係する情報が自動車に準備され、
b)ぬれた車道を検出する少なくとも1つのセンサ装置が設けられ、
c)ハイドロプレーニングの危険を持つ走行区間の区間部分が存在し、かつぬれた車道が検出されると、ハイドロプレーニングを防止する援助機能が実施される。
(もっと読む)
無人搬送車、および、その走行制御方法

【課題】無人搬送車の走行制御において、走行速度により目標走行経路と、停止範囲および減速範囲を決定することにより、安全性を高めた走行をおこなう。
【解決手段】地図データと、走行速度が設定された経路データとを保持し、レーザにより周辺環境の状況を計測して、地図データと計測されたデータとをマッチングして、現在位置を求める無人搬送車において、走行速度に応じて、走行速度が大きくなればなるほど大きくなるように、移動先距離を決定する。そして、基準点から移動先距離にあたる経路上の点を、移動先位置として、その移動先位置に向かって走行させる。また、その走行速度に応じて、減速範囲と、停止範囲を定めて、障害物をそれらの範囲内で検知したときには、それぞれ無人搬送車を減速または停止するように制御する。この減速範囲と停止範囲も、走行速度に応じて広くなるようにとる。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
車速制御装置
【課題】路面の摩擦係数が低い状況で車速制御を行う場合に、制駆動力制御が頻繁に繰り返されることを防止し、路面状況に応じた適切な車速制御を行う。
【解決手段】車速制御装置は、運転者などにより設定された設定速度を超えないように車両の速度を制御し、一旦設定された設定速度を変更する手段を備える。制駆動力制御は、車両挙動安定化制御又はトラクション制御の少なくとも一方である。制駆動力制御が実行された場合には、変更手段により設定速度が変更される。路面摩擦係数が低く滑りやすい路面などを車速制御しながら走行中に、制駆動力制御が実行された場合には、路面状況などに対して設定速度が高すぎると推測し、設定速度を変更する。これにより、車速が設定速度に到るまで運転者がアクセルを踏み続けることにより、頻繁に制駆動力制御が作動することが防止される。
(もっと読む)
走行支援装置
【課題】自動走行モードから、ドライバの運転操作に基づいて走行を行う手動走行モードへの切換を適切に行うことが可能な走行支援装置を提供する。
【解決手段】走行支援装置1は、自動走行モードから手動走行モードへの切り換えを許可することができる領域である運転許可領域Aを設定する運転許可領域設定部61を備えている。運転許可領域設定部61は、自車両11の進路候補R1〜Rnと自車両11周辺の障害物12との干渉が想定されない領域である安全領域Aを算出し、算出された安全領域Aに基づいて運転許可領域Aを設定する。
(もっと読む)
運転支援制御装置
【課題】 車両の走行状況やドライバの操作状況を常に監視して制御の複雑さを回避しながら、走行計画に近づけるようにドライバに対する運転支援を行うことができる運転支援制御装置を提供する。
【解決手段】 所定の走行計画に基づく目標加速度に対して、ドライバの操作に基づく要求加速度をドライバが違和感を覚えない範囲で近づける介入制御を行う。また、車両を安定走行させるためには、ドライバに違和感を与えたとしても要求加速度を目標加速度に近づける介入制御を行う。ここで、介入制御を行う際に、介入度の異なる複数の介入制御モードを設定する。
(もっと読む)
車両速度制限装置
【課題】車両がより安全に曲線路を走行することができる車両速度制限装置を提供する。
【解決手段】車両速度制限装置20は速度管理ECU21を備えている。速度管理ECU21には、ステアリング操作角を検出するステアリングセンサ30と、車速センサ34からの信号が入力される。速度管理ECU21は、これらの信号に基いて、走行中の曲線路の曲率(道路曲率)を求める。さらにこの道路曲率に応じた目標制限速度を求めるとともに、目標制限速度に応じたエンジン目標トルクを求める。実トルクが目標トルクを越えている場合、エンジンを制御することによって実トルクを目標トルクに近付ける。さらに実速度が目標制限速度を越えている場合には、エンジンブレーキをかける、リターダ装置を作動させる、ブレーキ装置を作動させる、などの制動操作を実行することにより、この車両を目標制限速度まで減速させる。
(もっと読む)
車両のクルーズコントロール装置を制御する方法及びシステム
本発明は、車両のクルーズコントロール装置を制御する方法であって、有効化されて、車両設定目標速度(Vcc set target speed)を維持するように設定された前記クルーズコントロール装置を用いて前記車両を駆動するステップと、現在の車両条件を記録するステップであって、前記現在の車両条件が、少なくとも現在の車両位置(A)、現在係合しているギヤ比、利用可能なギヤ比、現在の車両速度、利用可能な最大推進トルク、及び最も近い前方の上り坂勾配を含めこれから走行する道路の道路トポグラフィーを含む、ステップと、前記現在の車両条件に基づいて、前記前方の上り坂勾配における前方の車両位置(C)での、車両速度の低下に起因するダウンシフトを予測して、前記ダウンシフトを延期又は回避できる結果をもたらす少なくとも一つのアクティビティを選択するステップと、前記選択したアクティビティに従って前記クルーズコントロール装置を制御するステップとを含み、例えば直接ギヤからの下り坂を延期、または回避するために前記選択されたアクティビティに従って前記クルーズコントロール装置を制御することにより、燃料の節約が図られる。 (もっと読む)
車両クルーズコントロールを制御する方法及びシステム
本発明は、車両の設定目標速度(Vcc設定目標速度)を維持するように設計されたコントロールユニットを含む車両クルーズコントロール制御方法及びシステムであって、前記コントロールユニットは、車両の総重量である第1パラメータ、現在の道路勾配である第2パラメータを登録し、該登録された第1パラメータ及び第2パラメータに基づいて、前記クルーズコントロールにおけるブレーキクルーズコントロールについての設定車両超過速度(Vbcc)を新しい値(Vbcc flex)に調節するようにプログラムされている。これにより前記クルーズコントロール及びブレーキ装置において、遅延による設定車両超過速度(Vbcc)を超える車両速度に起因する車両速度の増加が回避される。 (もっと読む)
51 - 60 / 352
[ Back to top ]