
国際特許分類[B60W40/12]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 車両自体のパラメータに関するもの (70)
国際特許分類[B60W40/12]に分類される特許
1 - 10 / 70
車両の駆動力制御装置
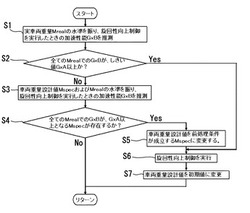
【課題】車両の諸元の変化を検出することなく、車両の諸元の変化を考慮した駆動力を制御することができる車両の駆動力制御装置を提供することを目的とする。
【解決手段】車両のスタビリティファクタを目標値に追従させる制御量と、その車両に要求される要求加速度とに基づいて駆動力を制御する旋回性向上制御を備えた車両の駆動力制御装置において、所定の範囲内で変化させた車両の諸元に基づく車両性能を推測する車両性能推測手段(ステップS1)と、該車両性能推測手段によって推測された車両性能が、予め定められた車両性能を得られるか否かを判断する判断手段(ステップS2)とを備え、前記判断手段により予め定められた車両性能を得られないと判断された場合に、前記旋回性向上制御を実行しない。
(もっと読む)
走行抵抗算出装置

【課題】実走行状態の車両に生じる抵抗を簡素な構成で算出可能な走行抵抗算出装置を提供する。
【解決手段】ホイール6分力計11〜14によって計測されたトルクと、ドライブシャフトC1,C2によって計測されたトルクとに基づいて、走行抵抗算出部41が、コーナリング抵抗、タイヤスリップ損失抵抗、タイヤ転がり抵抗、ブレーキ・ハブベアリング摺動損失抵抗、及びデファレンシャル差動摩擦抵抗を算出し、算出結果に基づいて車両の走行抵抗を算出する。また、走行抵抗算出部41が、車両の空気抵抗を算出し、算出された空気抵抗に基づいて車両の走行抵抗を算出する。
(もっと読む)
オートクルーズ制御装置
【課題】高い加速性能を必要としない状況では極力低いエンジン回転数での走行を行うことで、低燃費で経済的な巡航走行を行うことのできるオートクルーズ制御装置を提供すること。
【解決手段】オートクルーズ走行中の車間距離制御実行時(S1)には、車両負荷度、エンジン出力、シフトアップ後のエンジン回転数の判定を行い(S2、S4、S5)、高い加速度を必要としない前走車追従時にはシフトアップを実施する(S6)。
(もっと読む)
タイヤ温度推定装置
【課題】適正にタイヤの温度を推定することができるタイヤ温度推定装置を提供することを目的とする。
【解決手段】車両2の車輪3のタイヤ4のコーナリング特性値に基づいて、タイヤ4の温度を推定すると共に、当該コーナリング特性値が大きいほど前記タイヤ4の温度を低く推定することを特徴とするので、適正にタイヤの温度を推定することができる。例えば、車両2の旋回時にタイヤ4に作用する横力又は操舵反力と、タイヤ4のスリップ角度とに基づいて、コーナリング特性値を算出する。例えば、タイヤ4の温度は、タイヤ4のトレッド内部の温度である。
(もっと読む)
安全運転補助情報提供装置
【課題】
車両の重心位置情報を利用して、車両の運転手に車両の横転防止に寄与する安全運転補助情報を報知することができる安全運転補助情報提供装置を提供する。
【解決手段】
重心位置測定装置1は、車両の重心位置情報を取得するMPU49(重心位置情報取得手段)と、MPU49により取得した車両の重心位置情報に基づいて、車両の横転防止に寄与する安全運転補助情報を報知するプリンタ39、表示装置42(報知手段)とを有する。
(もっと読む)
車両自重測定装置
【課題】エンジンが高回転になっても正確に自重が測定できる車両自重測定装置を提供する。
【解決手段】変速前に、変速前の駆動力のデータと加速度のデータを繰り返し蓄積する変速前データ蓄積部5と、変速中に、変速中の加速度のデータを繰り返し蓄積する変速中データ蓄積部6と、変速前データ蓄積部5と変速中データ蓄積部6が蓄積したデータを用い、変速前の平均駆動力を変速前の平均加速度と変速中の平均加速度の差に基づいて自重を計算する自重計算部7と、変速前のエンジン回転数がガバニング開始回転数以上になると、変速前データ蓄積部5におけるデータの蓄積を一時停止する高回転時データ蓄積停止部8とを備える。
(もっと読む)
車両の駆動力制御装置
【課題】加速応答性の向上と旋回性能の向上とを両立させることのできる車両の駆動力制御装置を提供することを目的とする。
【解決手段】車両のスタビリティファクタを目標値に追従させて変化させるように駆動力を制御する車両の駆動力制御装置において、前記駆動力の増大要求に基づいて前記目標値を求める目標値設定手段(ブロックB1〜B4)と、その目標値設定手段で求められた前記目標値とスタビリティファクタの実際値とに基づいてスタビリティファクタの補正量を求める補正量算出手段(ブロックB5〜B8)と、その補正量算出手段で求められた前記差が小さくなるように前記駆動力を増大させる駆動力補正手段(ブロックB10〜B12)とを備えている。
(もっと読む)
車両特性情報推定装置及びそれを用いた警告装置
【課題】 走行環境において、低コストに、車両の重心位置及び慣性モーメント、タイヤのコーナリングパワーを同時にリアルタイムに推定できる車両特性情報推定装置を提供する。
【解決手段】 車両特性情報推定装置10は、車両の速度、ヨーレート、横加速度、前後加速度、及び舵角を含むセンサ情報を取得して、これらのセンサ情報に基づいて車両の重心位置、慣性モーメント、及びタイヤのコーナリングパワーを含む車両特性情報を推定する。車両特性情報推定装置10は、速度、ヨーレート、横加速度から横滑り角を推定する横滑り角推定部14と、速度、ヨーレート、横加速度、前後加速度、舵角、及び横滑り角推定部14にて推定された横滑り角に、車両の運動モデルを適用することで、その運動モデルに含まれるパラメータを推定するパラメータ推定部15と、このパラメータを変換することで、車両特性情報を求めるデータ変換部16とを備えている。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角調整装置の故障を検知し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、キャンバフラグ73Aによってキャンバ角調整装置44を制御し、車両1の後輪のキャンバ角を調整する。キャンバフラグ73Aがセットされている場合、車両用制御装置100は、ヨーレートセンサ装置81で検出されたヨーレートYを、ステアリングセンサ装置63Aで検出されたステア角Sで除算し、第1ヨーレートゲインを算出する(S54)。車両用制御装置100は、当該第1ヨーレートゲインから第2基準ヨーレートゲインを減算し、判断指標値Rを算出する(S55)。車両用制御装置100は、当該判断指標値Rと基準値Fの大小関係により、キャンバ角調整装置44の故障を検知する(S56)。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角の変更に伴う車両の挙動特性の変化を報知し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、車両の状態に応じてキャンバ角調整装置44を制御し、車両の後輪のキャンバ角を調整する。車両用制御装置100は、ヨーレートセンサ装置81で検出されたヨーレートYを、ステアリングセンサ装置63Aで検出されたステア角Sで除算し、単位ヨーレートゲインを算出する。車両用制御装置100は、算出対象期間TP内の単位ヨーレートゲインに基づく期間内平均値を算出し、右操舵時及び左操舵時の期間内平均値を平均し表示用ヨーレートゲインを算出する。車両用制御装置100は、ヨーレートゲインモニタ画面85に表示することで、第1キャンバ状態及び第2キャンバ状態の表示用ヨーレートゲインの差を報知する。
(もっと読む)
1 - 10 / 70
[ Back to top ]