
国際特許分類[B62D125/00]の内容
国際特許分類[B62D125/00]に分類される特許
1 - 10 / 68
運転支援装置
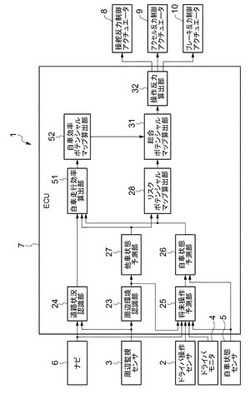
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
MDPSの自動フルターン作動制御方法

【課題】Uターンまたはフルターン時に操舵力を最小にすることができ、自動フルターンによってユーザの便宜性を増大することができるMDPSの自動フルターン作動制御方法を提供する。
【解決手段】本発明のMDPSの自動フルターン作動制御方法は、MDPSの自動フルターン作動条件を満たすか否かを判断する段階、MDPSの自動フルターン作動条件を満たす場合、MDPSをフルターンで操向する段階、MDPSの自動フルターン解除条件を満たすか否かを判断する段階、およびMDPSの自動フルターン解除条件を満たす場合、MDPSの自動フルターンを解除する段階を含み、MDPSの自動フルターン作動条件を満たすか否かを判断する段階は、MDPSの作動が正常であるかを判断する段階を含むことを特徴とする。
(もっと読む)
駐車支援システム
【課題】駐車支援システムにおいて、駐車支援の際に、運転者の衣類がステアリングホイールに巻きついたり、ステアリングホイールが運転者の手にぶつかったりする等の予期せぬ事態が発生するおそれをなくすることにある。
【解決手段】ステアリングホイール(7)と操舵輪(15L、15R)とが機械的に切り離され、ステアリングホイール(7)の回転に応じて操舵輪(15L、15R)を操舵する操舵モータ(22、23)を備えたステアバイワイヤシステム(2)であり、自動駐車手段(31)の実行中には、操舵モータ(22、23)により操舵輪(15L、15R)が操舵されてもステアリングホイール(7)は中立位置にある。
(もっと読む)
車両挙動制御装置
【課題】運転者への違和感が小さくできる車両挙動制御装置を得る。
【解決手段】ハンドルの操舵角を検出又は推定する操舵角検出手段と、車両の速度を検出する車速検出手段と、操舵角検出手段の出力である操舵角の0近傍に制御不感帯を有し、操舵角検出手段の出力である操舵角に対して、低車速側では制御不感帯幅を大きく、高車速側では制御不感帯幅を小さく設定し、車速検出手段の出力である車速に応じた制御不感帯幅を出力する制御不感帯幅設定器と、操舵角検出手段の出力である操舵角の絶対値が制御不感帯幅設定器の出力である制御不感帯幅で設定される操舵角の絶対値の上限より大きい場合に車両の減速制御用出力を発生する車両減速制御実施判断器とを備え、車両減速制御実施判断器の前記減速制御用出力により車両の減速制御を実施する
(もっと読む)
車両用操舵装置および車両用操舵方法
【課題】 ドライバに違和感を与えることなく操舵負担の軽減を図ることができる車両用操舵装置および車両用操舵方法を提供する。
【解決手段】 ドライバの操作入力を受けるステアリングホイール1と、ステアリングホイール1と機械的に分離し、前輪9を転舵するラックギア8と、ステアリングホイール1の操舵角θを検出する反力モータ角度センサ4と、ステアリングホイール1に入力される操舵トルクTを検出するトルクセンサ2と、操舵角θが第1操舵角θ1未満の場合には操舵角θに基づいて目標転舵角δ*を生成し、操舵角θが第1操舵角θ1以上の場合には操舵トルクTに基づいて目標転舵角δ*を生成する転舵コントローラ12と、を備える。
(もっと読む)
駐車支援システムおよび駐車支援装置
【課題】駐車枠の形状等の、駐車区画毎の特性に応じた適切な駐車支援を実行することのできる駐車支援装置を提供すること。
【解決手段】駐車場情報提供装置は、所定の駐車場の駐車区画の特性を示す情報である特性情報を記憶している。駐車支援装置は、当該特性情報の送信を要求する信号である特性要求を駐車場情報提供装置に送信する。駐車場情報提供装置は、当該特性要求の送信元に、上記特性情報を送信する。駐車支援装置は、当該特性情報を受信する。そして、当該特性情報に基づいて所定の駐車支援制御処理を実行する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】リレーの消費電流を抑制して、省エネルギー及び燃費向上を達成することができる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電源リレー及び/又はモータリレーを備えた、電動パワーステアリング装置の制御装置。エンジン始動後、イグニッションスイッチがオンの状態で、モータへの指示電流が一定時間継続して略ゼロであること等の所定の条件が満たされたときに前記リレーをオフするように構成されている。
(もっと読む)
車両の電動パワーステアリング装置
【課題】車両の変速機の操作位置や切換操作時間に応じて、操舵応答性を変更することができ、車速によらず、運転者が車両を通常走行させる場合とスポーツ走行させる場合の運転者意思を判断して操舵応答性の変更に反映させるように構成できる、車両の電動パワーステアリング装置を提供する。
【解決手段】電動機制御部20は、目標駆動値設定部21で電動機11の目標駆動値Iaを設定し、制御駆動値設定部25で検出駆動値Ibが目標駆動値Iaとなるように電動機11の制御駆動値Icを設定する。制御駆動値設定部25において、検出駆動値Ibが目標駆動値Icに収束する応答性を変更するために、ゲイン係数設定部25aで、目標駆動値Iaと検出駆動値Ibとの偏差ΔIに乗じるゲイン係数Kgを、変速機操作検センサ14で検出された変速機11の操作位置とに応じて可変に設定する。
(もっと読む)
駐車支援装置
【課題】
駐車場において確保してある駐車枠は、一般的な車両の外周サイズよりもさらに余裕を取った大きさで標示されており、かつ、複数の駐車枠が隣接して並べられていることが多いため、駐車枠に対して曲がって駐車してしまったり、駐車行動完了時に駐車枠内に収まってはいるが、隣接する駐車枠に既に駐車されている他車両によってドアを開閉するスペースが不足して、乗降できなくなってしまうという課題がある。
【解決手段】
駐車支援装置は、自車両を駐車可能な空間を検出する駐車可能空間検出手段と、自車室内の乗員や荷物の状態を把握する第一の状態把握手段と、自車周囲の環境や他車両の状態を把握する第二の状態把握手段と、前記駐車可能空間検出手段の出力状態と、第一および第二の状態把握手段の出力状態に基づいて、駐車可能空間内での自車を駐車するのに最適な位置を算出する目標駐車位置算出手段、を備える。
(もっと読む)
操舵システム
【課題】旋回中の車両の駆動力抜けに伴って発生する違和感を軽減できる操舵システムを提供することを課題とする。
【解決手段】操舵制御ECU130は補正判定部70を備え、変速機11のギアチェンジを検出することで駆動力抜けを検出する。そして操舵制御ECU130は、車両の旋回中に駆動力抜けを検出した場合、ベース補正ゲインDGを演算してベース信号DTに積算してベース信号DTが小さくなるように補正するとともに、ダンパ補正ゲインIGを演算してダンパ補償値Iに積算してダンパ補償値Iが大きくなるように補正し、電動機が発生する補助トルクを小さくする。
(もっと読む)
1 - 10 / 68
[ Back to top ]