
国際特許分類[B62M6/50]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 車輪付車両またはそりの乗手推進;そりまたはサイクルの動力推進;そのような車両に特に適合した伝動装置 (2,406) | 付加的な動力源を備えた車両の乗手推進,例.燃焼機関又は電気モータを備えるもの (222) | 補助的な電気モータを備えた乗手推進自転車 (180) | 制御またはそのための作動装置 (76) | 検出器またはセンサに特徴のあるもの,またはその配置 (35)
国際特許分類[B62M6/50]に分類される特許
1 - 10 / 35
磁歪式トルクセンサ、この磁歪式トルクセンサを搭載した電動アシスト自転車及び電動パワーステアリング装置
【課題】検出精度の高い磁歪式トルクセンサを提供することを課題とする。
【解決手段】回転軸に形成された磁歪部と、この磁歪部の外周を囲うよう配置されるボビンと、このボビンに巻かれて磁歪部の磁気特性の変化を検出するコイルとからなる磁歪式トルクセンサにおいて、ボビンは、磁歪部に接触した状態で、磁歪部に対して相対回転可能に嵌合されている。
【効果】ボビンが磁歪部に接触しているため、コイルを磁歪部の近傍に配置することができる。コイルとボビンとが近いため、コイル又はボビンに生じた温度変化が素早く他方の部材に伝わる。素早く伝えることで、コイルと磁歪部との間の温度差を素早く補正する。素早く補正することで、磁歪式トルクセンサの高い検出精度を確保することができる。
(もっと読む)
電動アシスト自転車のトルク感知装置

【課題】特にトルク感知装置によって、電動モータを制御して適当な補助力を出力する電動アシスト自転車のトルク感知装置を提供する。
【解決手段】外管と、介在管と、転動軸と、該外管と該介在管との間に環装される外受軸と、該介在管と該転動軸との間に環装される内受軸と、一端が該介在管に、他端が該転動軸に連結される弾性部材と、該転動軸に環装される第一プレートと、該転動軸に環装されると共に、該第一プレートと接近するように該介在管に位置する第二プレートと、該第一プレートと第二プレートとの角度の差を感知する感知ユニットとを備えるトルクセンサと、該介在管の一端に環装される一方向ベアリングと、該一方向ベアリングに環装されるチェーンギアと、該各転動軸の一端にそれぞれ組み合わせる2つのクランクと、該各クランクにそれぞれ枢設されるペダルとを有するものである。
(もっと読む)
電動自転車の人力駆動力検出装置
【課題】一般的なハンガ部を用いることができて、製造コストの低減化を図ることができ、かつ、良好な信頼性を維持できる電動自転車の人力駆動力検出装置を提供する。
【解決手段】本発明の人力駆動力検出装置30は、ハンガ部20から側方に突出しかつ突出部分がハンガ部20よりも太径の段つき形状に広がり、細径筒部31aと拡径側壁部31bと太径筒部31cとを有する取付用部材31と、クランク軸7aを回転自在に支持する軸受26の外周面と取付用部材31の太径筒部31cの内周面との間に環状に配設され、外周の一部が切欠かれた形状とされて周方向に隣接する部分よりも径方向に薄肉となった弾性変形部32aを有するセンサ支持部材32と、前記弾性変形部32aに取り付けられた歪検出センサ33とを備えている。
(もっと読む)
自転車
【課題】 スタンド操作の際の足や外部の物でセンサが衝撃を受けることを防止できる車速検出装置を備えた自転車を提供すること。
【解決手段】 車体10aの後部の車軸支持部26aに後輪12の車軸12aを支持させて、車軸支持部26aの近傍に片足スタンド42を取り付け、チェーン27を介した駆動力により後輪12を駆動するようにするとともに、車軸支持部26aにチェーン引き機構を取り付けて、チェーン引き機構の後端部を車軸支持部26aよりもさらに後方に位置させた電動補助自転車10に車速検出装置30を設けた。車速検出装置30を、後輪12に設けたマグネット32と、車軸12aの移動に伴って移動するセンサ用ブラケット33を介して車体10aの後部に取り付けたセンサ37とで構成し、センサ37を、チェーン引き機構の後端部よりも前側で、車体10aの後部よりも車体幅方向の内側に配置した。
(もっと読む)
自転車用モータ制御装置および自転車
【課題】発進時の乗り方に応じてモータを適切に制御できるようにする。
【解決手段】制御部12は、アシストモータ60を制御する。制御部12は、クランク位置検出部40と、クランク位置判断部41と、モータ制御部43と、を備える。クランク位置検出部40は、自転車の右クランク18aおよび左クランク18bの位置を検出する。クランク位置判断部41は、クランク位置検出部40の検出結果に基づいて、自転車のクランクが下死点を含む所定領域にあるか否かを判断する。停止判断部は、右クランク18aおよび左クランク18bの停止を判断する。モータ制御部43は、停止判断部42が、右クランク18aおよび左クランク18bが停止していると判断した後に、右クランク18aおよび左クランク18bが所定領域にあるとクランク位置判断部41が判断する間は、アシストモータ60の駆動を禁止する。
(もっと読む)
電動自転車の人力駆動力検出装置
【課題】ペダルを踏む姿勢に起因する前方や後方への分力の影響を最小限に抑えることができて、チェーンなどの駆動力伝達体を前方に引張る力に対応する力を良好に検出することができる電動自転車の人力駆動力検出装置を提供する。
【解決手段】駆動スプロケット13によってチェーン15を前方に引張る力の反力によりクランク軸7aが後方へ弾性変形しようとする力を受けて弾性変形する弾性変形部23aを設け、この弾性変形部23aに歪み検出センサ24を取付ける。そして、弾性変形部23aおよび歪み検出センサ24を、側面視してクランク軸7aの軸心7a’から斜め下方に傾斜した後方位置からクランク軸7aの軸心7a’に向けて配設した。
(もっと読む)
電動自転車の人力駆動力検出装置
【課題】ペダルを踏む姿勢に起因する前方や後方への分力の影響を最小限に抑えることができて、チェーンなどの駆動力伝達体を前方に引張る力に対応する力を良好に検出することができる電動自転車の人力駆動力検出装置を提供する。
【解決手段】駆動スプロケット13によってチェーン15を前方に引張る力の反力によりクランク軸7aが後方へ弾性変形しようとする力を受けて弾性変形する弾性変形部23aを設け、この弾性変形部23aに歪み検出センサ24を取付ける。そして、弾性変形部23aおよび歪み検出センサ24を、側面視してクランク軸7aの軸心7a’から斜め下方に傾斜した後方位置からクランク軸7aの軸心7a’に向けて配設した。
(もっと読む)
電動補助自転車の補助力制御装置
【課題】運転者の踏み力に応じたアシストトルクを発生するようにモータの駆動制御を行う電動補助自転車の補助力制御装置を提供する。
【解決手段】運転者がペダル(40L、40R)を踏むことにより回転する前記クランク軸(38)の回転トルク値をトルクセンサ(80)で検出し、該回転トルク値を用いて決定されたアシスト力を発生するようにモータ(50)を制御する電動補助自転車(10)の補助動力制御装置(54)は、前記回転トルク値のピーク位置が検出されたタイミングから前記回転トルク値が検出されたタイミングまでの時間から、現在の前記回転トルク値が検出されたときの前記クランク軸の回転角度を算出するとともに、算出された前記クランク軸の回転角度から、検出された前記現在の回転トルク値から運転者が鉛直方向に前記ペダルを踏む踏み力を算出し、算出された前記踏み力に応じて前記モータのアシスト力を決定する。
(もっと読む)
電動自転車
【課題】補助駆動力を出力する補助駆動スプロケット29にチェーン15を良好に噛み合わせるとともに、前進時や惰性走行時でのチェーン15の弛みを良好に吸収することができながら、チェーン15に、テンションスプロケット45をその付勢方向とは逆方向に移動させるような張力が作用した場合でも、チェーン15の歯飛びやチェーン15の脱落などを生じることを防止できる電動自転車を提供する。
【解決手段】補助駆動スプロケット29へのチェーン15の巻き角度を増加させるとともにチェーン15に付勢力による張力を与えてチェーン15の弛みを吸収するテンショナ装置40とを備え、チェーン15に、テンションスプロケット45をその付勢方向とは逆方向に移動させるような張力が作用した際の、前記テンションスプロケット45の移動する限界位置を調整可能な状態で規制する位置調整機構50を設けた。
(もっと読む)
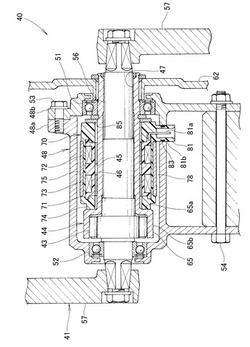
トルク検出装置、トルク検出装置ユニット、及び電動アシスト自転車
【課題】簡単な構成で漕ぎ出し直後から人力によるペダル踏力を算出することが可能なトルク検出装置を得る。
【解決手段】トルク検出装置20は、クランク軸7に設けられる軸部回転体30と、軸部回転体30とコイルバネ50を介して連結され、チェーン10が噛み合わされる歯部40dが外周部に形成された歯部回転体40と、軸部回転体30に設けられ、等間隔角度でN極、S極の順に磁石37,38が配置された支持部32と、歯部回転体40に設けられ、支持部32と同じ等間隔角度でN極、S極の順に磁石47,48が配置された支持部42と、所定の電気角だけずらして配置され、支持部32の磁界を略正弦波状の検出信号として検出するホールセンサー35,36と、所定の電気角だけずらして配置され、支持部42の磁界を略正弦波状の検出信号として検出するホールセンサー45,46と、を備えたものである。
(もっと読む)
1 - 10 / 35
[ Back to top ]