
国際特許分類[B66B1/30]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | エレベータ;エスカレータまたは移動歩道 (15,418) | エレベータの制御システム一般 (2,372) | 走行速度,加速度,または減速度に影響をおよぼすための調整手段,すなわち反作用動作,をもつ制御システム (320) | 電気的なもの (285) | 駆動装置に影響を与えるもの (183)
国際特許分類[B66B1/30]に分類される特許
1 - 10 / 183
エレベータシステム
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
エレベータの制御方法、エレベータ制御装置及びそれを利用したエレベータ装置
【課題】本発明は、制御効率を向上し得るエレベータの制御方法を提供することを目的とする。
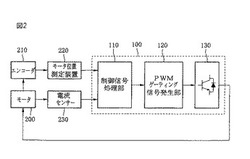
【解決手段】本発明のエレベータ装置は、エレベータを駆動するためのモータと、モータの位置の値を計算してエレベータ制御装置に伝送するモータ位置測定部と、モータの位置の値を貯蔵する位置貯蔵部と、第1周期ごとに位置貯蔵部から前記モータの位置の値を受信し、モータの速度を受信してモータを制御するためのトルク制御値を出力する状態帰還位置制御部と、第2周期ごとにトルク制御値と位置の値に基づいてモータの速度を推定し、状態帰還位置制御部に伝送する状態推定部と、トルク制御値に基づいて電流制御値を生成し、電流制御値と前記モータの駆動電流に応じて電圧制御値を出力するベクタ制御部と、電圧制御値に応じてモータの駆動電源を制御するモータ駆動部と、を含む。
(もっと読む)
エレベータ

【課題】
エレベータが或る階に到着後、人の乗り降りによりカゴを吊り下げるロープが伸縮しカゴが上下動する。それを抑えるためカゴ固定装置を備える。その階でカゴ荷重が増加(減少)後にカゴの固定を解除したときは、急激にカゴが下降(上昇)してショックが生じる。このようなショックを防止するための専用装置が必要であったのを不要とする。
【解決手段】
カゴが固定されていない状態において所定階で積載荷重が所定量増加(減少)したらロープがどれだけ伸びる(縮む)のかを計測しておけば、それによって任意階で積載荷重が任意量増加(減少)したらロープがどれだけ伸びる(縮む)かの長さが計算できる。カゴが固定されている状態において任意階で、前記の長さだけロープを縮め(伸ばし)ておいてからカゴの固定を解除する。
(もっと読む)
エレベータの制御装置
【課題】計測の結果、乗り心地の悪化を検出した場合においても、乗り心地の悪化を防止することが可能なエレベータの制御装置の提供。
【解決手段】本発明は、乗りかご1の荷重を検出する荷重検出装置7と、この荷重検出装置7にて検出された荷重に基づいて起動時の制御定数を設定する起動時制御定数設定手段と、この起動時制御定数設定手段へ零点変更を指示する零点変更手段16と、この零点変更の前後における乗り心地を比較する負荷比較手段15と、零点変更の前後における乗り心地の差が所定の範囲よりも大きい場合に、零点変更前の制御定数を零点変更手段16へ指示する無負荷時特性値記録手段17とを備えた構成にしてある。
(もっと読む)
国の全額借金返済と都道府県市町村区の全額借金返済の為の知的所有財産の携帯電話及び携帯無線装置による非常停止非常制御操作出来るエレベーター磁極切り換えインバータ制御レールモーター装置の著作権原本。
【課題】従来のエレベーターは事故が多く故障停止時、回復に長い時間がエレベーター構造上、修理時間が、長くかかり過ぎた。
【解決手段】エレベーターのモーター装置に磁極切り換えインバータレールモーターを設置して、弱電波発射及び弱電波受信装置によって、更に外部エレベーター赤外線カメラと赤色ダイオードライト玉を使用したカメラ各階停止の電波連絡装置によって、エレベーター制御装置等の故障停止の復旧エレベーター作動技術とワイヤ摩耗劣化を遅らせた人口ダイヤ粒入り鋼金属を被せたワイヤ構造によって、今まで以上のエレベーター安全を考えた著作権原本装置。
(もっと読む)
速度制御装置
【課題】移動体の運転速度に関係なく、制御系の時間遅れに伴う着床位置誤差の影響を解消し、所望の着床位置での位置決め精度を向上した速度制御装置を提供することを目的とする。
【解決手段】移動距離設定器26で予め設定した移動距離L*から遅れ時間移動距離演算器31で求めた移動距離Ldを減算した値(L*−Ld)を移動距離の目標値としてクリープレス運転演算器33に入力する。クリープレス運転演算器33では、位置検出器12から位置検出信号が入力された時点のモータ速度指令値N*および移動距離目標値(L*−Ld)に基づいてクリープレス運転開始時の加速度の初期値α(0)と加加速度jを演算し、加速度指令発生器23が出力する加速度指令α*をクリープレス運転演算器33で演算した加速度指令α(0)に書き換える。速度指令発生器24では、加速度指令α(0)に基づいて得られる時々刻々の速度指令値N*を出力し、所望の着床位置Cでかご7を停止する。
(もっと読む)
エレベータ装置
【課題】利用者の利便性を損なうことなく、待機階への走行時におけるピーク電力の抑制や消費電力低減を図ることができるエレベータ装置を提供する。
【解決手段】乗りかご1が待機階になく乗り場呼びおよびかご行き先階登録がないときに待機エレベータと判定する待機エレベータ判定手段29と、待機エレベータと判定した乗りかご1の待機階を決定する待機階決定手段30と、待機エレベータが次の新規乗り場呼びが発生するまでの予測時間TAを算出する予測時間算出手段31と、待機エレベータの乗りかご1を予測時間TA内に待機階へと走行するときの速度および加速度を決定する速度・加速度決定手段32とを備え、速度・加速度決定手段32は、待機エレベータの乗りかご1を待機階へと走行する速度および加速度の少なくとも一方を通常運転時よりも小さくした。
(もっと読む)
省エネエレベータ
【課題】エレベータの運転効率を損なわないようにしながら、ピーク電力の抑制と消費電力量の低減、電力デマンドの管理を図る。
【解決手段】乗りかご7と、電動機4と、乗客重量と乗りかご重量の和にバランスするように重量が設定された釣り合いおもり5と、電動機の回転速度、回転方向を検出するエンコーダ6と、乗りかご7内の荷重を検出する荷重センサ19とを備えた省エネエレベータにおいて、かご内荷重と、電動機4の回転方向と、により力行運転であることを判断する運転状態判別部14と、節電目標値に応じて少なくとも乗りかご7の走行速度と加速度とを定めた節電データベースと、を備え、乗りかご7が現在位置から目的階へ運転され、力行運転であると判断された場合、節電データベースに基づいて乗りかご7の走行速度あるいは加速度を決定する。
(もっと読む)
エレベータの制御装置
【課題】 音声認識装置は利用者の発話から呼び登録を認識するまでに時間を必要とするにもかかわらず、発話中に戸閉動作を開始することで音声を誤認識したり、発話中に既に登録済みの呼びに対して運転を開始し音声認識装置を使用中の利用者が希望する階床を通過したりするため、音声認識装置の利用者に不便を与えていた。
【解決手段】 エレベータ利用者の音声によりエレベータの呼び登録を実施する音声認識装置をかご内又は乗場に備えたエレベータにおいて、エレベータ制御装置に音声認識状態を判断する手段を備え、利用者が発話中であると判断した場合に、扉が全開中であれば利用者の発話が完了するまで戸閉動作の開始を遅らせ、扉が戸閉動作中であれば利用者の発話が完了するまで走行の開始を遅らせるなど、エレベータの動作を遅延させて音声認識のタイミングを確保する。
(もっと読む)
エレベータの制御装置
【課題】回生コンバータを昇降路の底部から離れた位置に据え付ける際に据付作業の足場としてかごを利用しつつ、回生コンバータが故障してもエレベータを運転することができるエレベータの制御装置を提供する。
【解決手段】エレベータの昇降路の底部又は底部近傍に設けられ、直流電力が入力された際に、当該直流電力を交流電力に変換してエレベータのかごを移動させるモータに供給するインバータと、昇降路の底部又は底部近傍に設けられ、交流電力が入力された際に、当該交流電力を直流電力に変換してインバータに供給するダイオードコンバータと、インバータとダイオードコンバータとよりも上方で昇降路に設けられ、交流電力が入力された際に、当該交流電力を直流電力に変換してインバータに供給し、インバータからの直流電力を回生する回生コンバータと、昇降路の底部又は底部近傍に設けられ、電源から交流電力が入力された際に、当該交流電力の供給先をダイオードコンバータと回生コンバータとの間で切り換え得るように設けられた切換装置と、を備えた。
(もっと読む)
1 - 10 / 183
[ Back to top ]