
国際特許分類[B66B1/36]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | エレベータ;エスカレータまたは移動歩道 (15,418) | エレベータの制御システム一般 (2,372) | 細部 (845) | あらかじめ設定された位置にカー,ケージ,またはスキップを停止するための手段 (164)
国際特許分類[B66B1/36]の下位に属する分類
かつ制御ハンドルまたはレバーを中立位置へ戻すためのもの
かつ階床に正確に位置するためのもの (78)
かつ妨害要因,例.負荷荷重の変動,を考慮するためのもの (48)
国際特許分類[B66B1/36]に分類される特許
1 - 10 / 38
エレベータ装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
エレベータ着床装置用隙間寸法点検装置およびエレベータ着床装置用隙間寸法点検方法
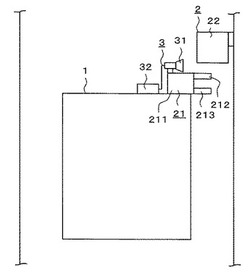
【課題】点検作業の効率化を図ることができるエレベータ着床装置用隙間寸法点検装置を得る。
【解決手段】かご1に設けられた磁気センサ21と昇降路に設けられた着床プレート22との隙間寸法を測定する隙間寸法点検装置3であって、かご1に設けられ、磁気センサ21に対向する着床プレート22の端面が含まれるように撮影するカメラ31と、カメラ31に撮影された画像における着床プレート22の端面の位置に基づいて、着床プレート22の幅方向についての磁気センサ21と着床プレート22との隙間寸法を測定し、カメラ31に撮影された画像における着床プレート22の端面の幅方向の大きさに基づいて、着床プレート22の奥行方向についての磁気センサ21と着床プレート22との隙間寸法を測定する隙間寸法測定装置321と、隙間寸法測定装置321の測定結果を記憶する記憶装置323とを備えている。
(もっと読む)
エレベータシステム

【課題】点検作業の効率を向上させることができるエレベータシステムを提供すること。
【解決手段】乗りかご10は、昇降路105内を移動することで、乗り場H1〜H4間を移動するものである。制御装置14は、乗りかご10を昇降させる駆動機103の駆動制御を行うものである。人体型認識装置11は、作業員の体型データを認識するものである。点検コントローラ12は、乗りかご10の上部に乗った作業員が点検対象を指定することができるものであり、乗りかご10の上部に設けられている。モード切替装置13は、通常モードと、点検モードとを切り替えるものである。制御装置14は、点検モードに切り替わり、点検対象が指定された場合に、点検対象が体型データに基づいた所定距離だけ乗りかご10の上部よりも上方の位置となるまで乗りかご10を昇降させる。
(もっと読む)
エレベータシステム
【課題】エレベータシステムにおいて、乗りかごの床面と乗場床面との間に段差がある状態で乗りかごが停止した場合に、エレベータシステムの主制御部に不具合があっても、乗りかご自体でそのことに対応できるようにすることである。
【解決手段】各乗場床面に関する基準位置を与える部材として、着床用プレート82,84,86,88が昇降路40の内壁面に沿って配置される。乗りかご60には、着床用プレート82,84,86,88に対応する4つの検出器を含むかご位置検出装置70が設けられる。乗りかご60に搭載されるかご制御装置90は、乗りかご60の床面と乗場床面に段差がある状態で乗りかご60が停止したときに、かご位置検出装置70の検出結果に基づいて、その段差の状態を判断し、その段差が乗りかごの乗客にとって退避可能な段差であると判断したときに特別信号を出力する。
(もっと読む)
エレベータ乗りかごの制御装置
【課題】CUMPの実現が可能で、しかも高い精度で着床制御ができるエレベータ乗りかごの制御装置を提供する。
【解決手段】1枚の遮蔽部材11が、ドアゾーン検出領域部34、ドアゾーン上端−リレベリングゾーン下端検出領域部35、ドアゾーン下端−リレベリングゾーン上端検出領域部36を並設し、光電式位置検出器10は、ドアゾーン検出領域部34のドアゾーン下端とドアゾーン上端を検出する第1検出部101A、ドアゾーン上端−リレベリングゾーン下端検出領域部35のリレベリングゾーン下端とドアゾーン上端を検出する第2検出部102A、ドアゾーン下端−リレベリングゾーン上端検出領域部36のドアゾーン下端とリレベリングゾーン上端を検出する第3検出部103Aを有している。
(もっと読む)
エレベーター制御装置
【課題】かごを精度よく着床させると共に、かごの着床検出と同時にかご内重量の変動分を検出できるエレベーター制御装置を得る。
【解決手段】昇降路2の壁面部には、各停止階床7a〜7cにおけるかご1の戸開閉可能位置に対応する位置に、光の反射面を有する反射部材8a〜8cが突設されている。反射部材8a〜8cは、垂直方向の断面形状が略台形状で、斜め上方向き反射面と斜め下方向き反射面、およびそれらの間に設けられた垂直反射面を有する。反射部材8a〜8cに対向するかご1の前面上方部には、反射部材8a〜8cの斜め上方向き反射面に光を照射し、反射光を受光する第1の送受光器9a、反射部材8a〜8cの斜め下方向き反射面に光を照射し、反射光を受光する第2の送受光器9b、反射部材8a〜8cの垂直反射面に光を照射し、反射光を受光する第3の送受光器9cを有する光発生受光装置9が設けられている。
(もっと読む)
エレベータの制御システム
【課題】乗りかごの重量と位置センサの誤差による影響を受けずに正確に吊り合いトルクを出力させ、ブレーキ装置の保持力を確認するトルクを正確に出力するエレベータの制御システムを提供する。
【解決手段】エレベータの乗りかご及び吊り合いおもりを昇降させる巻上機と、巻上機の速度や回転角度を検出する回転角度検出器と、巻上機の回転を停止させる複数のブレーキ装置と、ブレーキ装置を制御するブレーキ制御装置と、全てのブレーキ装置解放と同時に、回転角度検出器の出力から乗りかごと吊り合いおもりの重量差を相殺し、巻上機の速度をゼロにするための吊り合いトルクを出力するゼロ速度指令制御装置と、を備え、吊り合いトルク出力によって乗りかごと吊り合いおもりの重量差が相殺されて、平衡状態のときに1台のブレーキ装置を閉じ、吊り合いトルクに対してブレーキ装置のブレーキ保持力を確認するために所定のブレーキ診断トルクを出力し、回転角度検出器の出力からブレーキ装置の保持力の正常又は異常を判定する。
(もっと読む)
エレベーターシステム及びエレベーターシステムの制御方法
【課題】かご位置を把握できなくなった場合における復帰動作に要する期間が短縮されたエレベーターシステムを提供する。
【解決手段】各階床に停止するかご1と、かご1を駆動する電動機3と、かご1の駆動に応じてパルスを生成するロータリーエンコーダ9と、電動機3を制御する制御装置8と、各階床に設けられたRFID7と、かご1が各階床に近接した際にRFID7と通信可能なように設けられたRFID通信部とを含み、制御装置8は、かご1が各階床に停止した際のかご1の位置を示す情報とRFID7のIDとが関連付けられたかご位置判断情報を記憶しており、RFID7から読み出されたIDに基づいてかご位置判断情報を参照することにより、かご1の位置を認識可能であることを特徴とする。
(もっと読む)
エレベーターの遠隔操作装置
【課題】エレベーターのかご停止位置を任意の位置に遠隔操作できるエレベーターの遠隔操作装置を提供する。
【解決手段】巻上装置6を駆動する駆動装置7と、駆動装置7へ駆動信号を送信して駆動装置7を制御する制御装置8とを備えたエレベーターを遠隔操作するエレベーターの遠隔操作装置であって、エレベーターの操作指令を入力する操作端末9と、操作端末9から出力された信号a1を受信する信号受信装置10と、信号受信装置10から出力される信号a2の内容を解析する信号解析装置11とを備え、信号解析装置11で解析した信号a3を制御装置8に送信し、エレベーターを操作する。
(もっと読む)
エレベータシステム
【課題】据付作業,保守点検作業をより簡単にすると共に、乗りかごの位置を確実に検出し、長尺物が長周期地震により大きく振動しても引っ掛からない、より安全性を高めたエレベータシステムを得る。
【解決手段】乗客が乗降可能である領域を示すドアゾーンを検知するエレベータシステムにおいて、乗りかご100側に設けられ、昇降方向に所定距離だけ離され、かつ乗り場側に対向して設置された2個の位置検出センサ1,2と、乗りかごの現在位置がドアゾーン内あるいはドアゾーン外に位置しているかの判定結果を記憶する現在位置記憶手段と、を備え、2個の位置検出センサ1,2のいずれかの出力が得られた場合、現在位置記憶手段に記憶された判定結果を反転する。
(もっと読む)
1 - 10 / 38
[ Back to top ]