
国際特許分類[B67B3/02]の内容
処理操作;運輸 (1,245,546) | びん,広口びんまたは類似の容器の開封または密封;液体の取扱い (2,641) | びん,広口びんまたはこれに類似した容器への密閉部材の装着;密閉した容器の開封 (495) | 蓋によるびん,広口または類似の容器の密閉 (175) | フランジの付いている蓋,例.王冠,を用いそしてフランジを変形させることにより固定するもの (52)
国際特許分類[B67B3/02]の下位に属する分類
キャッピングマシンにおいて帯材から蓋を切り出すもの
キャップイングヘッドのキャップの送り (16)
キャップを装着するためのキャップイングヘッド (29)
国際特許分類[B67B3/02]に分類される特許
1 - 7 / 7
容器のキャッピング方法および容器詰め飲料
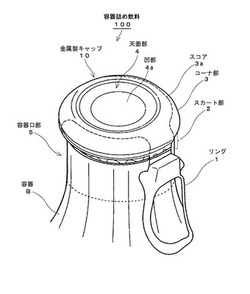
【課題】落下衝撃等を受けた場合であってもシール力が低下する場合であってもシール部材のシール力が低下しにくい容器のキャッピン方法および容器詰め飲料を提供する。
【解決手段】シール部60を有するシール部材6を間に介し容器口部5に金属製キャップ10を巻き締めた後に、金属製キャップ10のコーナ部3及びスカート部2をコーナ部圧着型30及びスカート部圧着型20によって圧着した状態を保持し、天面部プレス型40に天面部4を軸方向下方に押して凹部4aを形成し、シール部60のインナーリング60aによって突出部(インナーリング60aの最大外径dmax>容器口部5の内周面の最小内径Dmin)を形成する。
(もっと読む)
容器用の閉じ蓋

本発明は、容器の開口部を密封する閉じ蓋に関する。特に、本発明は、ボトル等の容器の口を密封する閉じ蓋(10)に関する。本発明の第1態様により提供されるのは、容器の口により定められる開口部を密封する閉じ蓋であり、前記閉じ蓋は、前記口を覆うように適合された本体(12)と、前記本体から伸びる非連続な外縁(14)とを含み、前記外縁は、開き位置と閉じ位置との間で変形可能である。本発明は、容器に前記閉じ蓋を付与する方法も提供する。 (もっと読む)
瓶密封キャップのかしめ密封装置。
【課題】 瓶を密封キャップで長期間安定してかしめ密封ができる事で密封の信頼性を増し、また自動機での量産及び少量生産する半自動装置にも使用できるかしめ密封装置を得ること。
【解決手段】 瓶の口部に密封キャップを密封する密封装置であって、かしめ爪を有するセンター穴あきチャックの該センター穴に押圧かしめ棒を挿通すると共に該押圧かしめ棒を復動させる押圧複動装置を設けたかしめ密封装置と、該かしめ密封装置を復動させるかしめ密封複動装置をベース支持台に設け、該かしめ密封複動装置でかしめ密封装置を復動制御させると共にかしめ爪の摺動と押圧かしめ棒の押圧で密封キャップをかしめ密封させ、また押圧かしめ棒の位置確認センサーを、かしめ密封複動装置又はチャック若しくは該押圧かしめ棒の位置が確認できる位置に設けている。
(もっと読む)
容器用の充填及び密閉装置
本発明は、容器(6)用の充填及び密閉装置に関し、第1のロボットアーム(11)を備える第1の処理ステーション(1)、第2のロボットアーム(21)を備える第2の処理ステーション(2)、及び定位置の第1のプロセスステーション(4)を含んでおり、第1のロボットアーム(11)は、容器(6)を定位置の第1のプロセスステーション(4)へ搬送するようになっており、第2のロボットアーム(21)は、容器(6)を第1のプロセスステーション(4)から後続の1つのステーション(7)へ搬送するようになっており、定位置の第1のプロセスステーション(4)において少なくとも1つのプロセス工程を実施するようになっている。 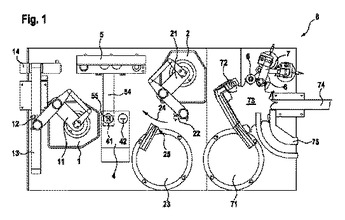 (もっと読む)
(もっと読む)
打栓機
【課題】打栓に伴う瓶の破裂又は破損による危険性を低減し、安全な打栓を可能にする。
【解決手段】打栓機100は、スロート12を有し昇降可能に支持された打栓ヘッド10と、瓶1を支持する支持体62と、スロート12によって王冠90の外周部を瓶1の口部1aに締め付けさせるように打栓ヘッド10を下降させるためのハンドル30と、支持体62上に置かれる瓶1の少なくとも側面を取り囲むように配置されたカバー110とを備え、ハンドル30は、カバー110の外側に延びている。
(もっと読む)
閉鎖機械
【課題】 本発明の課題および目的は、特に簡単な、且つ従ってコストの安い構造によって特徴付けられ、且つ、その閉鎖機械の場合に、この機械の洗浄が同時のコスト低減において更に改善される、閉鎖機械を形成することである。
【解決手段】 ねじり閉鎖栓または瓶の王冠でもって、例えば瓶またはそのようなものような、容器を閉鎖するための、循環する構造様式の閉鎖機械であって、この閉鎖機械が、循環する独楽状回転体を有しており、この独楽状回転体に、多数のそれぞれに閉鎖要素を備える容器閉鎖位置が形成されている様式の上記閉鎖機械が提示され、その際、閉鎖機械が、機械的、及び/または動力伝達的に、単に循環しない中央支柱16によって、この閉鎖機械13を囲繞する室と結合されていることが提案されている。
(もっと読む)
シール荷重検出方法およびシール荷重検出装置
【課題】巻き締め終了後の荷重FBを検出することにより、ゴム栓4によるシール力を確認する。
【解決手段】ゴム栓4が打栓された容器(バイアル2)に金属キャップ12をかぶせ、このキャップ12の天面部12b側からプレッシャブロック10によって荷重をかけ、前記ゴム栓4を圧縮した状態にして、巻き締めローラ14によって前記キャップ12のすそ(円筒部12aの下端12c)を内側に折り曲げて巻き締めを行う。その後、キャップ天面12bの荷重を解放すると、ゴム栓4が膨張するのでその変位量S1を検出する。予め記憶してある荷重−ゴム栓圧縮量曲線から、キャッピング時の荷重FOに対するゴム栓4の圧縮量HAを求め、さらに、この圧縮量HAから前記変位量S1を減算し、前記曲線により減算した圧縮量HBから対応する荷重FBを求め、この荷重をキャッピング後のシール荷重であると判断する。
(もっと読む)
1 - 7 / 7
[ Back to top ]