
国際特許分類[E01B27/20]の内容
固定構造物 (153,614) | 道路,鉄道または橋りょうの建設 (13,779) | 軌道;軌道用の工具;あらゆる種類の鉄道建設用機械 (1,369) | 軌道上での同時作業によるまたはよらない砂利の敷きこみ,交換,処理作業,ふるい分けまたは取り除き;それらの装置;まくら木の詰め込み (67) | まくら木の詰め込み軌道上での同時作業によるものまたはよらないもの;軌道支持砂利のつき固め (38) | 軌道支持道床の締め固め,例.軌道を振動させるもの,表面振動機によるもの (7)
国際特許分類[E01B27/20]に分類される特許
1 - 7 / 7
道床突き固め機
ポイント区分を道床突き固めするための特別に構成された道床突き固め機は、2つの内側のタンピングユニット(13)と2つの外側のタンピングユニット(24)とを有している。それぞれ外側のタンピングユニット(24)は、横方向ガイド(12)並びに横方向スライド駆動装置(14)にスライド可能に結合されたガイドブロック(25)に対して相対的に、機械長手方向に延在する旋回軸(26)を中心にして旋回可能に構成されていて、旋回駆動装置(27)に結合されている。これによって、外側のタンピングユニット(24)のタンピング工具(18)を、分岐したレールを広範囲に亘って道床突き固めするために、機械中央(23)から最も遠い位置に位置決めすることができる。 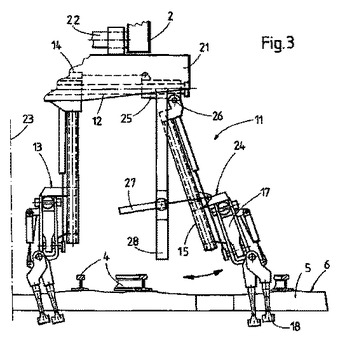 (もっと読む)
(もっと読む)
軌道のバラストを締め固めるための方法及び機械
軌道(3)のバラスト(2)の締め固めは、清掃装置(4)による清掃顎に2段階で行われる。このために、清掃されたバラストが投下され、それによって第1のバラスト層(29)が形成される。この第1のバラスト層上に敷設された軌道(3)は、前方のスタビライザ装置(24)によって横方向振動にさらされ、それによって第1のバラスト層(29)が締め固められる。第2のシュート(25)を用いて、第2のバラスト層(30)が形成され、次いでこの第2のバラスト層(30)は後方のスタビライザ装置(18)によって締め固められる。 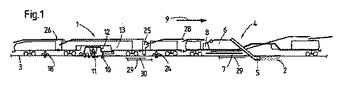 (もっと読む)
(もっと読む)
タンピングツールによる道床バラストのつき固め方法

【課題】 軌道の道床バラストのつき固め効果を確実に得ることのできる、タンピングツールによる道床バラストのつき固め方法を提供する。
【解決手段】 バラストbに対するタンピングツール1の貫入深さを異にする前後複数段のつき固め操作工程で成り、前段のつき固め操作後、該つき固め操作時の前記タンピングツール1の貫入部の上部に下端側が部分的に位置する状態位置で、後段のつき固め操作を順次行い、最終段のつき固め操作時のタンピングツール1の貫入深さ位置が最も浅い位置に存して終了する。
(もっと読む)
軌道を沈下させるための方法および機械
軌道(2)を制御して沈下させるために、測定系(10)の、後方の測定箇所(11)で、軌道(2)の長手方向傾き(α)が検出され記憶される。少なくとも10mの進行長さのために、現行の高さプロフィール(16)が形成され、この高さプロフィール(16)に重畳して軌道目標位置を表す後方の補償直線(17)が算出される。後方の測定箇所(11)は、計算によって後方の補償直線(17)に沿って案内されるので、後方の測定箇所(11)と前方の測定箇所(11)との間に位置する中間の測定箇所(11)で、測定弦の位置についての補償値が得られる。  (もっと読む)
(もっと読む)
軌道直下を突き固めるための突固めユニット
軌道(3)の3つのまくら木(6)直下を同時に突き固めるための突固めユニット(5)であって、内側の突固め工具と、真ん中の突固め工具と、外側の突固め工具とを有している。内側の突固め工具(12)の旋回軸線(17)は、真ん中の突固め工具(13)の旋回軸線に関して、垂直方向に延びる距離(a)だけ低く位置している。両突固めツール(19)の長手方向軸線(18)は、内側および真ん中の突固め工具(12,13)の旋回軸線(17)に関して中心外で、かつ内側の突固め工具(12)の旋回軸線(17)寄りに位置決めされている。これによって、小さなまくら木区分幅を有するまくら木下でも問題なく突き固めることができる。  (もっと読む)
(もっと読む)
道床突固め機
軌道突固め機(1)が、―機械長手方向に対して垂直に延びる横方向(19)に関して―それぞれ機械中心(11)のより近くに位置する2つの内側のユニットフレーム(12)と、2つの外側のユニットフレーム(13)とを有している。これらの2つの外側のユニットフレーム(13)は、互いに独立して横方向(19)でシフト可能に下側の横方向ガイド(18)に支承されている。更に、下側の横方向ガイド(18)の上位に位置決めされた、機械フレーム(2)に固定された上側の横方向ガイド(21)が固定されている。下側の横方向ガイド(18)は、それ自体が上側の横方向ガイド(21)にシフト可能に固定された滑子(20)に支承されており且つこれらの滑子に対して横方向(19)で相対的にシフト可能である。外側の各ユニットフレーム(13)はシフト駆動装置(23)と、下側の横方向ガイド(18)に沿って独立して横方向シフトするために結合されている。これにより、外側のユニットフレーム(13)をポイント区分(27)の突固めのために、機械中心(11)から比較的大幅に隔てることが可能である。 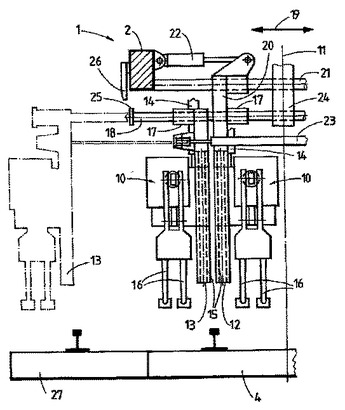 (もっと読む)
(もっと読む)
軌道の高低狂いの整正のための方法
本発明は、高低狂い(y−)の整正のための方法に関し、この場合に軌道は高低狂い(y−)の各値に依存した余剰持ち上げ(y+)だけ、最終的な目標位置(X)を越えて持ち上げられて、仮の目標位置(Xv)を形成した状態で突き固められる。次いで軌道安定化の範囲で軌道(2)のバラスト道床に種々の圧縮を与えて、所望の目標位置(X)を得るようになっている。これによって、もとの軌道高低狂い位置への軌道の戻りは避けられる。 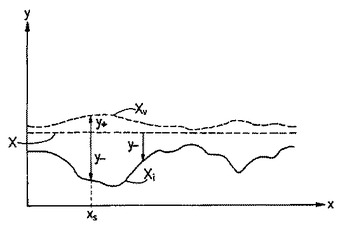 (もっと読む)
(もっと読む)
1 - 7 / 7
[ Back to top ]