
国際特許分類[E01C19/22]の内容
固定構造物 (153,614) | 道路,鉄道または橋りょうの建設 (13,779) | 道路,競技場あるいは類似のものの建設またはその表面の作成;建設または修復用の機械または補助工具 (4,275) | 舗装用材料の調製または散布用,敷設された材料の作業用,または舗装の形成,固め,または仕上げ用の機械,工具または補助装置 (657) | 打ち込まれた未硬化物の固化または仕上げ用のもの (196)
国際特許分類[E01C19/22]の下位に属する分類
そのためのローラ;土の締め固めに使用できるローラ (92)
ローラ以外の突き固め機または振動機 (82)
ローリング工具とランミング,タンピングまたは振動用工具とを共に有する装置
新しく敷いた粗面舗装層を,ローリング,タンピング,または振動によることなく滑らかに仕上げするための機械 (4)
新しく敷いた粗面舗装層に粗目または模様をつけるための機械または装置,例.刻み目をつけるローラ (5)
ローラ,たこつきまたは振動機によらないで新しく敷いた粗面舗装層に所定の表面仕上げを与えるために特に適用される手動工具 (6)
国際特許分類[E01C19/22]に分類される特許
1 - 7 / 7
転圧機械のスクレーパ装置

【課題】本発明は、人手に依存せずに、常にスクレーパ部材が適正な間隔を確保し続けられるようにした転圧機械のスクレーパ装置を提供する。
【解決手段】本発明の転圧機械のスクレーパ装置は、転圧輪6の外周面との間で所定の間隔δを介在させて配置されたスクレーパ部材21を、フロントフレーム2に、転圧輪の外周面と接離する方向に移動可能に支持するスクレーパ支持機構30と、スクレーパ部材を、弾性支持された転圧輪の姿勢変化に追従させて接離方向に変位させる追従機構50とを具備して構成した。同構成により、転圧輪が、現場の地面の凹凸の状況により、大きく上下に変位したり、進路変更の際に大きく前後に変位したりしても、スクレーパ部材は、追従機構、スクレーパ支持機構により、転圧輪の姿勢の変化に追従して、転圧輪の外周面と接離する方向に変位して、付着物の除去に最適な所定間隔を一定に保ち続ける。
(もっと読む)
転圧管理システムおよび転圧管理方法

【課題】小規模ないし中規模の転圧作業現場において、転圧機械の軌跡を簡便に管理し転圧作業の確実性と検証性を向上させること。
【解決手段】転圧作業の際に使用する転圧管理システム100であって、レーザ光を照射し、レーザ光の当たった物体までの距離を測定するレーザ距離センサ102と、物体までの距離が、予め設定した距離範囲内にあるか否かを判定する距離判定部141と、物体が前記距離範囲内にある時間を測定する時間計測部144と、時間計測部144により測定された時間に基づいて物体がロードローラ101であるか否かを判定するロードローラ判定部146と、ロードローラ101が前記距離範囲内に異なる時刻に所在した回数を計測する転圧回数計測部147と、を備えたことを特徴とする。
(もっと読む)
舗装材の締固め方法
【課題】施工区間に段差構造物Jがある場合でも締固め不能箇所を残さずに済むような、締固め方法を提案する。
【解決手段】舗装材上面P1から段差構造物上面P2までの高さ以上の厚みをもつ基部と、該基部から延設された下り坂のスロープ部と、を備えると共に、底面が締固め面とされた段差プレート1を、前記基部の端面が段差構造物Jの側部と接するようにして、段差構造物Jに隣接した締固め不能箇所となる舗装材の部分上に配置し、転圧ローラが段差プレート1を乗り越えるときに当該段差プレート1を介して下方の舗装材が締め固められるようにする。
(もっと読む)
舗装用レーキ
【課題】 施工現場の状況により、必要とされる舗装用レーキの均し板の傾斜角度を、均し板の取付け角度調整金具を取付けることにより、適切な角度へと変更することができ、施工作業をする人が無理な体勢をとらなくても、適切な作業姿勢で、舗装材の敷き広げ敷き均し及び、境界周辺での舗装材の余盛り処理等のレーキ作業ができることにより、労働条件の改善と効率的な舗装施工及び、品質向上を可能とする舗装用レーキを提供すること。
【解決手段】 本発明の舗装用レーキ1は、均し板6と柄2と取付け金具4と取付け角度調整金具5を有し、均し板6と取付け金具4は、均し板取付け角度調整金具5を介してボルト・ナット5bと5cによって固定され、柄2と取付け金具4はボルト・ナット3によって固定されている。
(もっと読む)
コンクリートトロエル操縦システム
【課題】従来の機械的操作操縦制御アセンブリは、運転者によってレバーにこれを移動するため大きな物理的な力を加える必要があるためその操作が困難である。
【解決手段】自走コンクリート仕上げトロエルは操縦レバーの操作に必要な力の一部を補助する操縦システムを有する。操縦リンケージが操縦レバーをロータアセンブリに接続する。操縦助成機構は操縦リンケージに予圧を加える張力バーまたはスプリングを有する。この操縦助成機構は、レバーを特定位置に移動した後、このレバーをその位置に維持するため必要とされるレバー付勢力をレバーの全操作ストロークに亘り約20ポンド以下に減少する。
(もっと読む)
道路表面の品質評価のための仮想プロフィログラフ
【課題】より効率的で時宜にかなった、道路の乗り心地測定方法を提供すること。
【解決手段】道路を建設しながら道路の乗り心地を示す測定結果を提供することができる仮想プロフィログラフが開示されている。結果として従来方法に比較してより時宜にかなった低コストである、道路の乗り心地の指標が得られた。第1の実施形態では全地球的航法衛星システムのアンテナが車両に取り付けられている。車両が道路上を進んでいるとき、アンテナ位置の測定値が別々の時間に記録される。道路のプロファイルは、出発位置から進んできた距離の関数としてアンテナの高さを測定することによって創り出される。他の実施形態では、道路の傾斜および車両の傾きを測定するのに傾きセンサが使用され、それによって車両の精密な向き、したがって道路の輪郭を決定することができる。
(もっと読む)
自動化された地面突固めのためのシステム及び方法
地面突固めシステムは、走行及び操舵可能な地面突固め装置(3)及び制御装置(5)を有している。この制御装置(5)は、突き固めようとする面(1)及び所属の面境界線(2)をオペレータによって規定するための面規定装置(6)を有している。更に、地面突固め装置(3)の目下の位置を検出するための位置検出装置(18)が設けられている。走行センサ(8a;8b)は、地面突固め装置(3)が各面境界線(2)を通過せずに、面(1)内で走行を続けるように地面突固め装置(3)の走行運動の目標値を規定することによって、地面突固め装置(3)の走行方向を転換する。補足的に、走行経路(4)を規定するための経路プランニング装置(7)が設けられていてよく、この場合、地面突固め装置(3)が走行経路規定を守ると、突き固めようとする面(1)を少なくとも1回は完全に通過するということが保証されている。このようにして、オペレータによって規定された面(1)内での地面の自動突固めを可能にする。 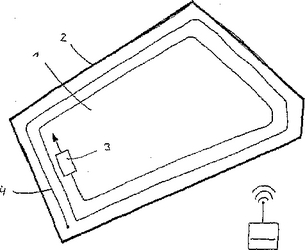 (もっと読む)
(もっと読む)
1 - 7 / 7
[ Back to top ]