
国際特許分類[E02F9/20]の内容
固定構造物 (153,614) | 水工;基礎;土砂の移送 (25,595) | 掘削;土砂の移送 (7,953) | グループ3/00から7/00に属するものに限定されない掘削機または土砂移送機械の部品 (5,969) | 駆動体;制御装置 (2,211)
国際特許分類[E02F9/20]の下位に属する分類
水圧式または空気圧式駆動体 (1,182)
国際特許分類[E02F9/20]に分類される特許
1,021 - 1,029 / 1,029
作業機械の管理装置
【課題】オペレータ毎に、建設機械稼動時間を管理でき、また、サービスマンが建設機械にサービスを行ったことをリアルタイムに把握できるようにし、サービスマンへの作業指示、サービスマンの実績管理、労務管理を容易かつ的確に行えるようにする。また、建設機械のアタッチメント装着状況を把握して、顧客の要望に即時に対処できるようにする。また、モニタパネルの表示画面内の限られたスペースに、運転に必要な情報とともに通信メッセージを表示できるようにする。
【解決手段】作業機械31の稼動開始時に、運転者識別データが入力されると、入力された運転者識別データと、建設機械31の稼動時間と、運転者識別データ入力日時とが、作業機械31から端末装置11に送信され、運転者が建設機械31を稼動させた時間が、端末装置11で表示される。
(もっと読む)
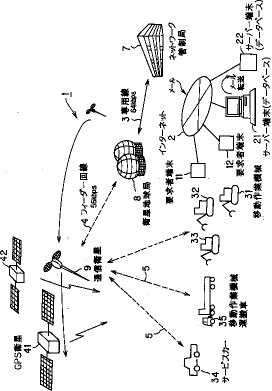
移動式機械の遠隔監視方法およびその装置

【課題】 移動式機械の機体稼働情報を確実に得るとともに、通信コストの低減を図る。
【解決手段】 建設機械の機体コントローラシステム33より、衛星32を介して、ホストコンピュータシステム11と、このホストコンピュータシステム11に公衆回線21を介し接続したユーザのコンピュータシステム22とに、建設機械の機体稼働情報を送信し、ホストコンピュータシステム11およびユーザのコンピュータシステム22は、共通の機体稼働情報を蓄積する。機体コントローラシステム33は、ホストコンピュータシステム11からの送信要求信号により、ホストコンピュータシステム11が要求した送信間隔信号で建設機械の機体稼働情報を送信し、ホストコンピュータシステム11からの送信停止要求信号により機体稼働情報の送信を停止する。
(もっと読む)
作業車両の作業量算出システム
【課題】 正確な作業量を算出する作業車両の作業量算出システムを提供すること。
【解決手段】 作業車両の作業量を算出するシステムにおいて、作業量算出システム1は記憶部11と、中央演算部12と、入力部13と、表示部14とを備え、作業量算出システム1は入力部13に入力された作業環境条件データに応じて作業車両の車速、及び作業車両の作業機の能力を補正し、それらの補正車速と補正作業能力値を基にして、作業量を算出することを特徴とする作業車両の作業量算出システム。
(もっと読む)
建設機械のワイパー作動装置
【課題】 キャビン内よりフロントウインドーを通して作業機の位置を監視しながらキャビン内に設置されている操作レバを操作して作業機を操作する建設機械において、操作レバより手を離すことなくワイパーの作動を可能にする。
【解決手段】 作業機を操作するための操作レバ20の操作ノブ21にワイパー2を作動/停止に切り換えるためのスイッチ23を設け、該スイッチ23の切り換えにより建設機械のフロントウインドー2に付着した水滴、雨水、泥水等の付着物を拭き落とせるように構成する。
(もっと読む)
建設機械の制御装置
【課題】建設機械が行う各種作業の内容に適合した所望のレバー操作性を得るようにする。
【解決手段】操作レバーが操作されたときに、必要に応じてスイッチ操作により、2つの油圧ポンプのうち一方の油圧ポンプと作業機との間の圧油供給路に設けられた操作弁をオンオフさせ、操作レバーが単位操作量だけ操作された際の作業機のスピード変化の大きさを変化させる。
(もっと読む)
遠隔操縦機械のカメラ視野角制御装置
【課題】 モニタの映像の動きを抑えることができ、ひいてはオペレータの操縦を容易にすることができる遠隔操縦機械のカメラ視野角制御装置の提供。
【解決手段】 油圧ショベル1の上部旋回体12には、カメラ8を装着した雲台81が取り付けられ、カメラ8の映像信号は遠隔地のモニタ9へ送信される。遠隔地のオペレータは操作側コントローラ4、無線機6、車体側コントローラ5を介して油圧ショベル1を遠隔操縦する。車体側コントローラ5は、バケット15の先端15aのカメラ8に対する方向がカメラ8の視野角の範囲から外れているとき先ず視野角を拡げ、視野角を最大としても視野角の範囲から外れているとき初めてカメラ8の方向を変更する。これにより、カメラ8の動き即ちモニタ9の映像の動きを極力抑え、オペレータが当該映像を見易くして操縦を容易にする。
(もっと読む)
油圧機械の盗難防止装置
【課題】油圧機械の盗難防止装置において、盗難を防止する能力が高く、安全性も高く、かつ盗人に発見されにくい箇所に簡単に設置できるようにする。
【解決手段】盗難防止装置20のソレノイドバルブ23をパイロット油圧ポンプ1とパイロット弁装置4との間のパイロット一次圧配管3に設置する。キー入力装置21のテンキー21aが暗証番号の順番で押されないと、解錠電子回路22Kは解錠信号を発生せず、ソレノイドバルブ23はパイロット一次圧配管3を遮断している。このため、パイロット油圧ポンプ1からのパイロット一次圧は遮断され、パイロット弁装置4の手動レバー4cを操作してもパイロット二次圧は発生せず、主制御弁6は動かされず、油圧シリンダ8は動かないので、油圧機械は動かせない。
(もっと読む)
建設機械の無線操縦装置
【目的】 通信不良が発生しても、操作性の低下や衝撃の発生を防止し、安全性を確保することができる建設機械の無線操縦装置を提供すること。
【構成】 送信機1の操作レバー1aを操作すると、その操作量に応じたデータが送信回路1hから電波として送信される。このデータは受信機2の受信回路2aで受信され、RAM2eに格納された後対応する増幅器2h1 〜2h7 へ出力される。送信機1と受信機2間に通信不良が生じたとき、CPU2cはROM2dのプイログラムに従って、通信不良直前のデータと復帰直後のデータの差を埋める補正値を作成し、さらにこの補正値と次の入力データの差を埋める補正値を順次作成し、これら補正値を増幅器2h1 〜2h7 の出力データとして使用する。隣接するデータ間に大きな差がなくなるので、上記目的が達成できる。
(もっと読む)
追尾装置の視準方法及び装置
【目的】 追尾装置の被追尾対象に対する視準を容易にし、視準作業の高効率化及び省人力化を図ることを目的とする。
【構成】 コントロールセンタ10側から作業車輌11をマニュアルで視準する際、視準用望遠鏡124を通してCCDカメラ21で撮影された作業車輌11側のターゲット18の画像を、表示装置143の、視準用望遠鏡124の視野中におけるターゲット18の位置に応じた箇所に表示し、この表示画面を見ながら視準用操作部152を操作し、駆動モータ12c、12gを駆動制御することで、表示装置143の中心箇所に表示される視準用望遠鏡124の視準用十字線マークの中心に、該表示装置143中のターゲット画像の中心を一致させ、視準用望遠鏡124を覗くことなく表示装置143の画面上でコントロールセンタ10側の自動追尾装置12を作業車輌11側のターゲット18に視準させる。
(もっと読む)
1,021 - 1,029 / 1,029
[ Back to top ]