
国際特許分類[E02F9/20]の内容
固定構造物 (153,614) | 水工;基礎;土砂の移送 (25,595) | 掘削;土砂の移送 (7,953) | グループ3/00から7/00に属するものに限定されない掘削機または土砂移送機械の部品 (5,969) | 駆動体;制御装置 (2,211)
国際特許分類[E02F9/20]の下位に属する分類
水圧式または空気圧式駆動体 (1,182)
国際特許分類[E02F9/20]に分類される特許
1,001 - 1,010 / 1,029
作業機械の操作装置
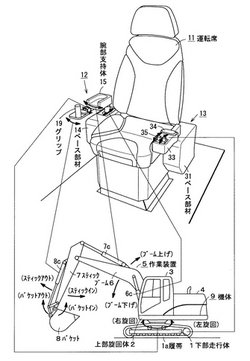
【課題】初心者であっても長時間の作業を容易にかつ安定して行なえる操作性の良い作業機械の操作装置を提供する。
【解決手段】運転席11の一側のコンソールボックス14上に前後方向移動自在かつ内外方向回動自在に、オペレータの一側の腕部の肘から先の部分を一体的に支持する一側の腕部支持体15を設ける。この腕部支持体15の前方に少なくとも1つの関節部を介して、オペレータが掴むグリップ19を回動自在に設ける。腕部支持体15を前・後方向に移動させることでフロント作業装置5のブーム6をブーム下げ・上げ方向に回動操作するブーム操作部と、腕部支持体15を内・外方向に回動することでスティック7をスティックイン・アウト方向に回動操作するスティック操作部と、グリップ19を内・外方向に回動することでバケット8をバケットイン・アウト方向に回動操作するバケット操作部とを設ける。
(もっと読む)
建設機械におけるエンジンの制御装置

【課題】 油圧ショベル1に、操作具操作が所定の設定時間以上操作されなかった場合に自動的にエンジン停止をする自動エンジン停止機構を設けるにあたり、エンジン温度、作動油温度が予め設定される温度以下に下降するまでは、自動のエンジン停止を制限するようにする。
【解決手段】 無操作検知時のエンジンの自動停止を、エンジンルーム6内にエンジンルーム内温度測定センサ18を設け、該ルーム内測定温度と外気温度との差が予め設定される設定温度最下になるまで制限するようにする。
(もっと読む)
建設機械の原動機制御装置
本発明は、原動機10によって駆動される油圧ポンプ24と、この油圧ポンプ24から吐出される圧油により駆動されるアクチュエータ5と、第1の操作部材22aの操作に応じて油圧ポンプ24からアクチュエータ5への圧油の流れを制御する制御弁25とを有する建設機械における原動機制御装置において、第1の操作部材22aの操作に応じて原動機10の第1の設定回転数Ntを設定する第1の設定手段41と、第2の操作部材34の操作に応じて原動機10の第2の設定回転数Nxを設定する第2の設定手段43と、第1のモードまたは第2のモードを選択する選択部材35と、選択部材35により第1のモードが選択されると第1の設定回転数Ntと第2の設定回転数Nxの大きい方の値に原動機回転数を制御し、選択部材35により第2のモードが選択されると第2の設定回転数Nxに原動機回転数を制御する回転数制御手段30,13とを備える。 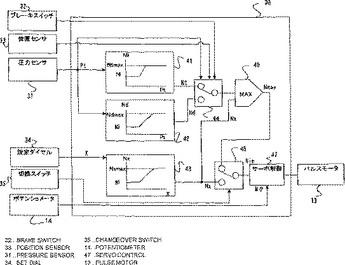 (もっと読む)
(もっと読む)
移動作業機の自動化構造
【課題】 高い処理能力を要することなく、高い精度で高速化に対応できる移動作業機の自動化構造を提供する。
【解決手段】 移動作業機1の位置を検出する位置検出手段3と、移動作業機1の作動を制御する制御手段49とを備え、移動作業機1の作業領域A0に複数の制御領域A1〜A8を設定するとともに、各制御領域A1〜A8に対応する複数の制御プログラムを備え、制御手段49が、位置検出手段4の検出に基づいて移動作業機1の各制御領域A1〜A8への到達を検知するのに伴って、到達した制御領域A1〜A8に対応する制御プログラムを実行して移動作業機1の作動を制御するように構成した。
(もっと読む)
操作パターン切換装置
【課題】切換レバーによる操作パターンの切換が確実に行え、かつ、ロックも確実に容易に行えるようにするとともに、切り換えたことが容易に認識できるようにし、切換レバーもコンパクトにした操作パターン切換装置を提供する。
【解決手段】複数の油圧アクチュエーターの作動を制御するコントロールバルブと、該コントロールバルブをパイロット油圧により操作するパイロットバルブとの間の接続を変更する切換バルブであって、該切換バルブ37を切り換える切換レバー42に操作用ハンドル43を位置変更可能に設け、該ハンドル43に突部43aを形成し、切換バルブ37の本体側の切換位置には前記突部43aと係合可能な凹部41a・41bを形成し、前記ハンドル43は切換レバー42に対して水平方向と鉛直方向に回動可能に枢支され、該ハンドルの重心を回動支点よりも切欠側に位置するように構成した。
(もっと読む)
索引付けされた機械利用メトリックスを提供するシステム
【課題】 索引付けされた機械利用メトリックスを提供するシステムを提供する。
【解決手段】 作業データを収集し、この作業データを作業機械の操作者に対して索引付けするシステム及び方法。本方法を実行する本システムは、操作者識別データに基づいて操作者を識別するように構成された操作者識別装置と、作業データを収集するように構成された作業データ収集装置とを備える。第1の処理装置は、収集された作業データを操作者識別データに対して索引付けし、通信装置は、索引付けされた作業データと操作者識別データとを第2の処理装置に転送する。第2の処理装置は、索引付けされた作業データと操作者識別データとを受信し、索引付けされた作業データに基づいて操作者利用メトリックスを実行する。
(もっと読む)
建設機械の制御装置
【課題】 運転中に作業モードの切り換えを行ってもオペレータの違和感や操作性の悪化が生じないような建設機械の制御装置を提供する。
【解決手段】 各作業モード毎に予め決められている吐出圧力と吐出流量の関係線図(P−Q線図)における各エンジンモータの回転数に対して、オペレータが違和感を生じない程度の回転数変動分(50rpm)だけエンジンモータの回転数を変化させたP−Q線図を設ける。そして、ネガティブコントロール圧が所定の圧力以下に達する時間、又はポンプ吐出圧が所定の圧力以上に達する時間が、所定の監視時間に対して30%以下のときは現在選択している回転数1900rpmから50rpmダウンさせ、70%以上のときは現在選択している回転数から50rpmアップさせ、30%を超え70%未満のときは現在選択している回転数とする。
(もっと読む)
作業機械操作システム及び方法
【課題】 作業機械操作システム及び方法を提供する。
【解決手段】 少なくとも1つの作業工具を備える作業機械の操作方法。本方法は、作業機械の作業工具の用途を示す作業機械の少なくとも1つの操作特性または操作者の経験レベルを検出する工程を含み、作業機械の操作を変更する行程では操作者の承認を要求するか、または承認なしで自動的に作業機械の操作を変更する行程を含む。作業機械の操作は、作業工具の新たな用途に対応して変更される。
(もっと読む)
データ圧縮装置及び方法,データ解析装置及び方法並びにデータ管理システム
【課題】 膨大なデータを圧縮できるようにするとともに、圧縮したデータから元のデータの特性をより正確に再現できるようにすることを目的とする。
【解決手段】 対象体の動作時に、この動作に応じて変動するn個(n:自然数)のパラメータの値からなるデータセットを複数検出する検出手段4と、検出手段4により検出された各データセットをn次元空間内に入力し、データセット数よりも少ない所定数のニューロンをn次元空間内に配置してニューラルネットワークの教師なし学習法によりニューロンの学習を行い、上記の複数のデータセットを、学習により得られたニューロンモデルを特徴付けるニューロンモデルパラメータに変換することにより圧縮するデータ圧縮手段6とをそなえる構成にする。
(もっと読む)
位置測定システム
【課題】
作業性に優れ、簡単で安価に基準面を検出でき、又基準面の測定が可能な位置測定システムを提供する。
【解決手段】
既知の点に設けられ上下方向に広がり角を有するレーザ光線40を回転照射する投光光学系と、レーザ光線の反射光を画像受光部上に導く受光光学系とを有する回転レーザ装置1と、前記レーザ光線を前記回転レーザ装置に向けて反射する反射体を有する対象物55と、該対象物の位置を求める為のGPS位置測定装置57と、前記画像受光部の前記反射光の受光位置から対象物に対する高低角を演算し、前記回転レーザ装置の位置情報、前記GPS位置測定装置による位置情報、前記高低角に基づき前記対象物の位置、高さを演算する制御演算部とを具備する。
(もっと読む)
1,001 - 1,010 / 1,029
[ Back to top ]