
国際特許分類[F16H59/40]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 回転運動を伝達するための変速あるいは逆転伝動装置のための制御入力 (10,329) | 入力が速度に関するもの (3,131) | 伝動装置要素の速度 (1,729) | 出力軸速度 (452)
国際特許分類[F16H59/40]に分類される特許
1 - 10 / 452
車両の制御装置
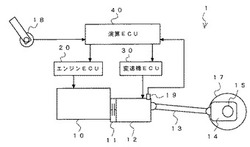
【課題】車両の制御装置に関し、エンジンの燃費を効果的に向上させる。
【解決手段】エンジン10と変速機12とを搭載した車両の制御装置であって、アクセルセンサ18と、回転数センサ19と、変速機の出力回転数と出力トルクとに対応する座標平面上に等アクセル開度線が設定された第1のマップから変速機出力トルクを設定する変速機出力トルク設定部41と、変速機の出力回転数と設定された変速機出力トルクとに基づいてエンジン出力を算出するエンジン出力演算部42と、エンジン出力と燃料噴射量とに対応する座標平面上に最少燃料噴射量線が設定された第2のマップから目標燃料噴射量を設定する目標燃料噴射量設定部43と、エンジン10の燃料噴射量が目標燃料噴射量となるようにエンジン10を制御するエンジンECU20とを備えた。
(もっと読む)
無段変速機及びアクチュエータ

【課題】安価な無段変速機及びアクチュエータを提供する。
【解決手段】プーリ軸に固定され一体的に回転する固定シーブと、前記プーリ軸に沿って軸線方向移動可能に支持された可動シーブと、前記固定シーブと前記可動シーブとの間に配置されたベルトと、前記可動シーブを軸線方向に移動させてプーリ溝幅を可変するアクチュエータとを有する無段変速機であって、前記アクチュエータは、電動モータと、前記電動モータが発生した回転力を伝達する減速機構と、前記減速機構を介して前記電動モータの動力を入力するナットと、前記ナットの回転量に応じて軸線方向に変位するねじ軸と、一端を前記ねじ軸に連結し、他端を前記可動シーブに連結し揺動可能となっている揺動部材とを有し、前記アクチュエータにはセンサが設けられていないことを特徴とする。
(もっと読む)
車両制御装置
【課題】変速機の同期装置に関して学習を行う機会を適切に確保できる車両制御装置を提供すること。
【解決手段】入力軸2Aの回転をそれぞれ異なる変速比で出力軸2Bに伝達する複数のギヤ対21,22,23,24と、いずれかのギヤ対に選択的に係合して入力軸の回転と出力軸の回転とを同期させる制御可能な同期装置40と、を有する常時噛合い式の変速機2と、入力軸に接続された第一動力源1と、出力軸に接続された第二動力源3とを備え、第一動力源の動力によらずに第二動力源の動力によって車両を走行させる所定走行時に、同期装置によって入力軸の回転と出力軸の回転とを同期させるときの動力伝達の開始点について学習制御を行う。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車について、内燃機関トルクを利用して、電動機に電気エネルギを供給するためのバッテリを効率良く充電すること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。シフト位置が「ニュートラル」にあり、摩擦クラッチが接合状態にあり、アクセル開度が「0」であり、バッテリ残量SOCが閾値TH未満である場合に充電条件が成立する。充電条件が成立すると、EGトルクを利用したバッテリの充電が行われる。具体的には、EGトルクを利用してMGが発電機として駆動され、MGの発電により得られた電気エネルギを利用してバッテリが充電される。
(もっと読む)
円錐摩擦車リング式無段変速装置の変速制御装置
【課題】リングの軸方向位置を検知するセンサをなくすと共に、リングが正常可動範囲を越えるような信号が出力することを防止する。
【解決手段】インプットコーン回転数,入力トルク,トラクション油温に基づきリングのスリップ率を求めて、実変速比から求めたリング軸方向位置を上記スリップ率により補正して、リングの軸方向位置を推定する。該推定したリングの軸方向位置と、目標速度比から算出したリングの軸方向位置とにより、リングのステア角を算出する。
(もっと読む)
無段変速装置
【課題】トロイダル型無段変速機の変速比制御の基準となるステッピングモータのステップ位置に関する学習値の信頼性を確保できる構造を実現する。
【解決手段】制御器により、無段変速装置を構成するケーシング内の潤滑油の温度が、ステッピングモータのステップ位置を安定して学習できる温度(設定下限温度以上且つ設定上限温度以下)であるか否かを判定する。そして、潤滑油の温度が、設定下限温度よりも低い場合又は設定上限温度よりも高い場合には、制御器による学習制御が実行される事を禁止する。これにより、得られる学習値が出力軸を停止させるのに不適正となる事を防止できて、ステップ位置に関する学習値の信頼性を確保できる。
(もっと読む)
無段変速装置
【課題】トロイダル型無段変速機の変速比制御の基準となるステップ位置に関する学習中に学習許可条件を満たさなくなった場合にも、不適正な位置を基準として変速比制御が行われる事を防止できると共に、変速比制御に素早く移行できる構造を実現する。
【解決手段】制御器が有する第四の機能により、学習制御が一度でも完了している事を条件として、実行中の学習制御を中止し、制御器中に記憶されている直前に学習したステップ位置を変速比制御の基準として、変速比制御を開始させる。これにより、変速比無限大の状態を実現できる適正なステップ位置を基準として変速比制御を開始できると共に、実行中の学習制御が完了するのを待って変速比制御に移行する場合に比べて、変速比制御に素早く移行できる。
(もっと読む)
自動変速機の制御装置、および、自動変速機の制御プログラム
【課題】 走行中にニュートラル状態に制御した場合にも、適切に故障検出を行うことができる自動変速機の制御技術を提供する。
【解決手段】 複数の摩擦係合要素の係合状態に応じて、変速比が異なる複数の変速段を実現可能な自動変速機の制御ECUは、車両が前進走行している状態であって、かつ、いずれか1つの変速段が実現されている状態で、車両のアクセルが操作されていないことを含む走行条件が成立した場合に、少なくとも1つの摩擦係合要素について係合力を低下させることにより自動変速機をニュートラル状態とするニュートラル制御を実行するニュートラル制御手段と、実際の変速比を特定する変速比特定手段と、ニュートラル制御の実行中に、実際の変速比に基づいて前記自動変速機が故障であるか否かを判定する第1の故障判定手段と、を備える。
(もっと読む)
変速制御装置および変速機装置
【課題】変速をより素早く完了させて、走行性能を発揮させる。
【解決手段】アクセル開度と車速の変化に対してリニアに変化するよう目標ギヤ比を設定すると共にこの目標ギヤ比がダウンシフト側の変速点Gdownに達したときにダウンシフト変速を実行し目標ギヤ比が変速点Gupに達したときにアップシフト変速を実行するものとし、目標ギヤ比の変化速度である目標ギヤ比変化速度Vgrとプレサーボ起動時間とに基づいて現在の目標ギヤ比が変速点Gdown,Gupに到達するタイミングよりも次の変速のプレサーボ起動時間だけ前倒ししたタイミングを推定してこのタイミングでプレサーボ起動を開始する。これにより、目標ギヤ比が変速点Gup,Gdownに到達すると、直ちにスウィープアプライ制御により必要なクラッチの油圧サーボに供給する油圧を昇圧して係合させることができる。
(もっと読む)
無段変速機の変速制御装置
【課題】クルーズ制御中の過渡時における無段変速機の変速ハンチングを抑制する。
【解決手段】クルコン要求馬力演算部33はクルーズ目標車速Soと実車速Sとの速度差ΔSからクルコン要求馬力HPsを求め、クルコン要求トルク演算部34はクルコン要求馬力HPsとエンジン回転数Neとに基づいてクルコン要求トルクTcsを求める。クルコン用アクセル開度演算部37はクルコン要求トルクTcsとエンジン回転数Neとに基づきクルコン用アクセル開度θhaの特性曲線が等馬力曲線に沿って設定されているエンジントルクマップを参照して、クルコン用アクセル開度θhaを設定する。目標プライマリ回転数演算部25はクルコン用アクセル開度θhaと実車速Sとに基づき変速線マップを参照して目標プライマリ回転数Npoを設定する。変速制御部26は目標プライマリ回転数Npoと実車速Sとに基づき目標変速比を求めて変速制御を行う。
(もっと読む)
1 - 10 / 452
[ Back to top ]