
国際特許分類[F16H61/46]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 回転運動を伝達するための変速あるいは逆転伝動装置の制御機能 (12,590) | 流体伝動装置のみの制御 (609) | 静圧形[5,2010.01] (561) | 出力要求による自動調整[5,2010.01] (47)
国際特許分類[F16H61/46]の下位に属する分類
目標変速比を達成するもの (7)
目標入力回転数を達成するもの (2)
目標入力トルクを達成するもの (1)
目標出力回転数を達成するもの (12)
目標出力トルクを達成するもの (3)
目標パワーを達成するもの,例.入力パワーまたは出力パワー (1)
過負荷防止,例.高圧を限定するもの (6)
国際特許分類[F16H61/46]に分類される特許
1 - 10 / 15
ハイブリッド作業車及びその走行制御方法
【課題】ハイブリッド作業車における無駄なエネルギー消費を抑制しエネルギーの回生効率を高める。
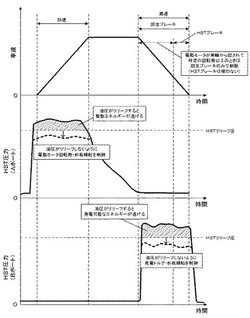
【解決手段】車両の減速時に電動モータが車輪から回されて所定の回転数以上のときはHSTブレーキを使わず、電動モータによる回生ブレーキのみで制動を行う。また、減速時にHSTの油圧がリリーフしないように電動モータの発電トルク及び油圧ポンプの斜板傾転角を制御する。また、加速時には油圧がリリーフしないように電動モータ5の回転数及び油圧ポンプの斜板傾転角を制御する。これにより、電動モータの出力を無駄なく駆動力として利用するとともに、減速時における回生効率を向上させることができ、燃費向上が可能となる。
(もっと読む)
作業車両

【課題】ブレーキ操作でオートクルーズを解除した場合のトラクタの速度減速率又は前後進ペダル操作でオートクルーズを解除した場合のトラクタの速度変化率が走行安全性が従来より高まるようにした作業車両を提供すること。
【解決手段】油圧式無段変速装置21の出力を略一定に維持するオートクルーズ機構を備えた車両で、(a)ブレーキペダル(43)の操作によりオートクルーズ制御が解除される場合の作業車両の速度減速率を、前後進ペダル(1)の作動解除又は減速方向への操作による作業車両の速度減速率よりも大きく設定すること、又は(b)前後進ペダル(1)の加減速操作によるオートクルーズ制御解除時の作業車両の速度変化率を、オートクルーズ制御を行っていないときの前後進ペダル(1)の操作による作業車両の速度変化率より小さく設定することで目標車速にする。
(もっと読む)
車速制御装置
【課題】指示速度と無段変速装置からの出力車速とを対応させるための走行テストを、狭小なコースで、かつ、テスト時間も短くて済むようにする。
【解決手段】指示速度L1,L2,L3に対応する基準の変速操作位置H1,H2,H3を設定する基準車速設定手段を、無段変速装置7の変速操作位置を指示速度L1,L2,L3近くの速度に相当する試験走行用の変速操作位置thに設定して車体を走行させ、その試験走行用の変速操作位置thにおける走行速度の検出結果から、指示速度L1,L2,L3に対応する変速操作位置を推定して、指示速度L1,L2,L3に対応する基準の変速操作位置H1,H2,H3として設定するように構成した。
(もっと読む)
車速制御装置
【課題】指示速度と無段変速装置からの出力車速とを対応させるための走行テストを、比較的狭小なコースで、かつ、テスト時間も短くて済むようにする。
【解決手段】指示速度L1,L2,L3に対応する基準の変速操作位置H1,H2,H3を設定する基準車速設定手段103で、複数の指示速度のうち、最高速側の指示速度L3よりも低速側の指示速度L1,L2に相当する変速操作位置H1,H2は、車体を走行させての走行速度の検出結果から、選択された指示速度L1,L2に対応する基準の変速操作位置H1,H2として設定し、その他の指示速度L3に相当する変速操作位置H3を、所定の変化率に基づいた演算によって算出するように構成した。
(もっと読む)
作業車両
【課題】オートクルーズ機構が故障した場合に安全に停止ができる作業車両を提供する。
【解決手段】変速ペダル18の踏み込み量を検出するポジションセンサの出力とトラニオン軸16aの回動角度を検出するポジションセンサの出力に応じてコントローラは電動モータ53を正転又は逆転させることにより、車両を前進または後進制御しているが、電動モータ53に正転または逆転の制御信号が出て、一定時間n秒後(例えば2秒後)にHSTトラニオン軸16aの回動角度を検出するトラニオン軸ポジションセンサの値が変化しなければ、コントローラは電動モータ53の異常としてエンジン停止ソレノイドへの出力を停止することでエンジンを停止させる。エンジンの停止の前に警報を鳴らしても良い。なお、警報を鳴らすとエンジンの停止を行わない制御でも良い。こうして、車両の安全走行性が維持できる。
(もっと読む)
トラクタの車速制御装置
【課題】 副変速操作位置に応じた適切な車速制御目標速度を、的確、容易に設定することができ、円滑なオートクルーズ走行を行わせる。
【解決手段】 第1の手段として、HSTのトラニオン軸1の角度を設定角度に維持するように制御すると共に、この設定角度を、副変速装置2の変速位置に応じて設定する。第2の手段として、HSTのトラニオン軸1の角度を制御して車速を設定車速に維持すると共に、この設定車速を、副変速装置2の変速位置に応じて設定する。
(もっと読む)
HSTトラクタのオートクルーズ装置
【課題】 トラクタ作業では、オートクルーズ走行操作を度々繰り返して行うことが多く、設定操作の容易化をはかる。
【解決手段】 車速を増減速するHSTペダル(1)と、車速を一定に保つように設定するオートクルーズスイッチ(2)と、この設定車速を記憶させるクルーズメモリスイッチ(3)とを有したHSTトラクタにおいて、このトラクタの走行中に、該クルーズメモリスイッチ(3)を押すと車速をメモリ(4)に転送可能とし、オートクルーズを解除した後にこのクルーズメモリスイッチ(3)を再度押すことにより、車速をメモリ値と車速検出値との比較のもとに、このメモリ値になるようにクルーズ制御する。
(もっと読む)
作業車両
【課題】前記車速維持機構を簡単に構成できるものでありながら、運転操作性等を簡単に向上できる作業車両を提供するものである。
【解決手段】走行車輪3,4を備えた走行機体2に搭載されたエンジン5と、エンジン5からの動力を変速する油圧式無段変速機25と、油圧式無段変速機25の変速出力を増減速操作する変速ペダル31,32と、油圧式無段変速機25の変速出力を略一定に維持する車速維持手段49とを備えてなる作業車両において、変速ペダル31,32の足踏み操作位置を検出する変速位置センサ47と、車速維持手段49を作動する手動操作用のクルーズスイッチ72とを備え、変速ペダル31,32を足踏み操作した状態で、クルーズスイッチ72をオン操作することにより、車速が略一定に維持されるように構成したものである
(もっと読む)
自走式管理機
【課題】 エンストを確実に回避することのできる制御機能を備えた管理機を提供することを課題とする。
【解決手段】 指令値変換部61に第1速度指令値C1及び速度比(Vact/Vset)を読込み、(Vact/Vset)×C1=C2の演算により、第2速度指令値C2を出力する。左の流体変速機22Lの出力軸47Lの回転速度を走行速度検出手段52Lで検出する。左変速機制御部62Lは走行速度検出手段52Lで検出した実回転速度と第2速度指令値C2とを比較して、実回転速度が第2速度指令値C2に近似するようにモータドライバー63Lを介して制御用モータ48Lを駆動する。右変速機制御部62Rも同様である。これにより第2次速度指令値はエンジンへの負荷が大きいほど小さくなる。この結果、エンストを回避することができる。さらに、作業者が減速操作をする必要はなく、自動的にエンジン負荷に応じて走行速度を制御する。
(もっと読む)
作業車両の制御装置
【課題】負荷が急変する場合には、エンストが発生しないように減速できる負荷制御が容易にできる作業車両の制御装置を提供する。
【解決手段】負荷制御モード切替スイッチをONにする(S151)。変速比パターンを設定する(S152)。前進(後進)ペダルの踏込み量を読込む(S153)。読み込み数値に基づいて、変速比パターン上のペダル踏込み量に対応する目標変速比値を算出する(S154)。現在のエンジン回転数、出力軸回転数読込み、現在変速比値及び負荷トルクを算出(S155、S156)。次いで、変速比・負荷マップを読み出す(S157)。現在変速比値における負荷トルクが目標変速比値におけるエンストライン(α線)上の負荷トルクを越えるときには、エンスト防止ライン(β線)に沿った線上での現在変速比値に相当する箇所まで、目標変速比値を減少させるように、比例電磁弁への印加電圧を補正する(S158、S159)。
(もっと読む)
1 - 10 / 15
[ Back to top ]