
国際特許分類[G01C19/02]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | ジャイロスコープ;振動質量を持つ回転感応装置;可動質量を持たない回転感応装置 (2,276) | 回転体ジャイロスコープ (70)
国際特許分類[G01C19/02]の下位に属する分類
細部 (25)
水平面内での方向指示用,例.定針儀 (13)
マスターコンパスからの信号により制御するもの,すなわちリピーターコンパス (1)
旋回率指示用;旋回率積分用
垂直方向指示用 (1)
国際特許分類[G01C19/02]に分類される特許
1 - 10 / 30
空間安定化装置、空間安定化方法、及び空間安定化プログラム
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
向上した始動中の速度推定のためのジャイロスコープの動的モータ振幅補償
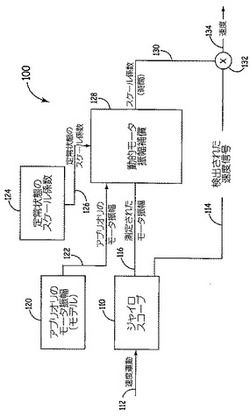
【課題】電力供給後の始動段階において、速やかに正確な速度情報をもたらすことができるジャイロスコープ装置のシステムおよび方法を提供する。
【解決手段】始動中のジャイロスコープ110の動的モータ振幅補償のためのシステムは、始動中のジャイロスコープのモータ振幅成長のモデルに基づいて、アプリオリのモータ振幅信号122を生成するように構成されたアプリオリのモータ振幅モジュール120と、定常状態のスケール係数モジュール124と、アプリオリのモータ振幅信号および定常状態のスケール係数信号を受けるように構成された動的モータ振幅補償モジュール128とを含む。動的モータ振幅補償モジュールは、ジャイロスコープからの測定されたモータ振幅信号116、アプリオリのモータ振幅信号、を受け、始動段階の間に、検出された速度信号に適用される時変スケール係数130を出力する。
(もっと読む)
ジャイロモータユニット

【課題】3軸ジャイロモータを薄型化、小型化する。
【解決手段】ジャイロモータユニット1は、中心軸J1が互いに垂直であり、外縁部を近接させて略三角錘状に配置される3つの円盤部2と、前記3つの円盤部に囲まれる領域に配置され、回転部が前記3つの円盤部の中央に固定される3つのモータ部と、を備え、前記3つの円盤部のそれぞれの外縁部の少なくともモータ部側の部位が、前記モータ部に向かって漸次径が減少する傾斜面を有する。好ましくは、前記3つの円盤部のそれぞれの外縁部のモータ部とは反対側の部位が、前記モータ部から遠ざかる方向に向かって漸次径が減少する他の傾斜面を有する。
(もっと読む)
ジャイロ式波力発電装置の制御方法
【課題】波動の周期変動に追従し得ると共に、浮体角速度とジンバル角度の位相ずれにも即応して、平均発電量の最大化を図ることのできるジャイロ式波力発電装置の制御方法を提供する。
【解決手段】波による浮体角速度演算手段21により、浮体角速度からジンバル回転による浮体角速度成分を除去した波による浮体角速度成分を求め、主指令生成手段22により、波による浮体角速度成分の周期に基づき発電機の回転数を制御する主指令を生成し、副指令生成手段23により、波による浮体角速度成分の位相とジンバル角度の位相とのずれに応じた補正量に基づく副指令を生成する。
(もっと読む)
空間安定装置
【課題】本発明は、ジンバル部の中に、そのジンバル部を駆動制御するための駆動制御情報を記憶した記憶媒体をジンバル部内に設け、制御器に接続するジンバル部を自在に駆動制御することができるようにすることを目的とする。
【解決手段】本発明による空間安定装置は、ジンバル部(1)内には、ジンバル部(1)を駆動制御するために必要な駆動制御情報(26)が読み書き自在に格納された記憶媒体(25)が設けられ、制御器(10a)はジンバル部(1)内の記憶媒体(25)から駆動制御情報(26)を読み取ることができる構成である。
(もっと読む)
制御モーメントジャイロスコープに使用する運動量交換組立体および内部ジンバル組立体
【課題】制御モーメントジャイロスコープに使用する運動量交換組立体および内部ジンバル組立体を提供する。
【解決手段】固定子筐体と固定子筐体の中でシャフト142上に配設されたスピンモータ134とを含むタイプの内部ジンバル組立体102が提供される。内部ジンバル組立体102は、シャフト142に取り付けられた第1のスピン軸受144、146と、第1のスピン軸受144、146を実質的に囲む軸受カートリッジ154とを備え、軸受カートリッジ154は、第1の端部空洞部160を部分的に画定する第1端部と、第1の中間空洞部159、161を部分的に画定する第2端部と、第1の端部空洞部160、194と第1の中間空洞部159、161との間に流れ連通をもたらす軸受カートリッジ溝とを有する。
(もっと読む)
ジャイロ安定化車両
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
障害耐容船舶スタビライザー制御システム
ジャイロスタビライザー歳差運動センサ(10)及び船舶ロール運動センサ(14)からのセンサ信号を利用できるか否かを検出するセンサ障害検出手段(16)を備える船舶スタビライザー制御システム(12)。制御システム(12)はジャイロスタビライザー(4)に機械的に結合されたジャイロアクチュエータ(8)の作動を制御する。プロセス制御変数を供給するセンサの障害検出を用いる利点は、利用可能なプロセス制御変数(またはセンサ)の検出された数を用いて階層化制御モードシステムを作動させ得ることである。それぞれの階層化制御モードは利用可能なプロセス制御変数を用いて、センサ障害及び電源喪失を許容する、ジャイロスタビライザー(4)の安全で有効な動作を保証するように設計される。利用可能なプロセス制御変数の数に基づいて適切な制御モードを選択するため、制御モードセレクタ(18)が備えられる。  (もっと読む)
(もっと読む)
能動適応ジャイロスタビライザー制御システム
歳差情報だけに基づいて海洋船舶の運動を安定化するためのジャイロスタビライザー制御システム及び方法。制御システムは自動利得制御(AGC)歳差コントローラ(60)を用いる。システムはジャイロフライホイール(12)に可能な限り大きな歳差−歳差が大きくなるほど、ロール安定化モーメントが大きくなる−を発現させるように、常に漸進的に最小化される利得因子を用いて動作する。この連続利得変化により、海況及び航行状態の変化への適応が与えられる。システムは最大歳差に到達する確度を有効に予測する。このイベントが検出されると、制動歳差トルクを与えるため、利得が急速に高められる。イベントが過ぎてしまうと、システムは再び利得を漸進的に低下させようとする。 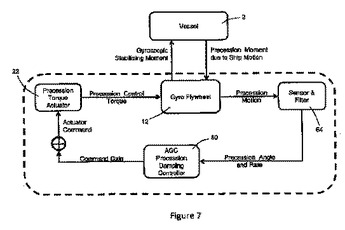 (もっと読む)
(もっと読む)
バランス装置
【課題】胴体の傾斜角を基準方向に回復する動作を補助する。
【解決手段】バランス装置は、センサと少なくとも1個のフライホイールとコントローラを備える。センサは、基準方向に対する胴体の傾斜角を検出する。少なくとも1個のフライホイールは、人に装着されたときに、軸線が胴体のヨー軸と非平行となるようにバランス装置に配置されている。胴体のヨー軸とは、胴体の長手方向に相当する。また、ヨー軸は、人が直立したときに基準方向に一致する。コントローラは、センサによって検出される傾斜角に基づいてフライホイールの回転速度を変更する。
(もっと読む)
1 - 10 / 30
[ Back to top ]