
国際特許分類[G01C21/10]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 速度または加速度の測定を使用するもの (157)
国際特許分類[G01C21/10]の下位に属する分類
航行体上で実施するもの;推測航法 (121)
国際特許分類[G01C21/10]に分類される特許
1 - 10 / 36
位置計測装置及び位置計測システム
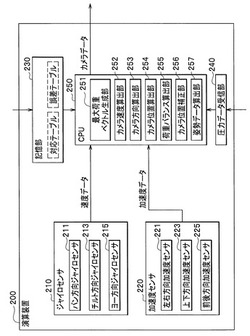
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
軌跡演算装置および軌跡演算方法

【課題】分解能が高くないセンサを用いて、健康のための体操のように所定の往復運動を含む体操の軌跡を射的法によって求めるために用いられる往路区間における終点を得る方法および装置を提供する。
【解決手段】被測定物の回転によって表される運動の前後での姿勢の変化を求める軌道演算装置であって、運動の期間中の被測定物の所定の位置の加速度および角速度を得る測定手段と、運動の期間中の前記測定手段によって得られる加速度の変化から運動の前後の被測定物の所定の位置の傾斜の角度の2次元表現を得て、測定手段によって得られる運動期間中の角速度から、運動で最も回転角の大きい主軸に直交する軸に関する回転を無視したときの回転行列を求め、傾斜の角度の2次元表現に回転行列を作用させることによって運動の前後での姿勢の変化を回転角の3次元表現として得るプロセッサと、を含む。
(もっと読む)
携帯端末装置、速度算出方法及び速度算出プログラム
【課題】GPS情報が取得できない区間で、適切な車両の速度を算出すること。
【解決手段】GPS情報に基づく速度を取得する取得部と、速度から求められる加速度と、加速度センサのデータとの相関係数、相関値を算出する第1算出部と、GPS情報が受信不可の区間において、相関係数及び相関値と加速度センサのデータとを用いて加速度を算出する第2算出部と、第2算出部により算出された加速度と、区間の前後で取得された速度とを用いて、区間内の速度を算出する第3算出部と、を備える。
(もっと読む)
角速度検出方法及びその装置
【課題】角速度計測装置が如何なる姿勢であっても角速度の計測が可能で、かつ連続データで検出可能な角速度検出装置を提供すること。
【解決手段】第1補正部102は、3軸磁気信号α1及び3軸加速度信号β1が入力されて第1補正磁気信号α2及び第1補正加速度信号β2を出力する。第2補正部103は、第1補正磁気信号α2及び第1補正加速度信号β2が入力されて第2補正磁気信号α3及び第2補正加速度信号β3を出力する。回転軸情報演算部104は、第2補正磁気信号α3及び第2補正加速度信号β3が入力されて回転軸情報cを出力する。回転量情報演算部105は、回転軸情報cと第1補正磁気信号α2とが入力されて回転量情報dを出力する。角速度ベクトル情報演算部106は、回転軸情報cと回転量情報dとが入力されて角速度ベクトル情報eを出力する。
(もっと読む)
補正装置、補正方法及び補正装置用プログラム
【課題】例えば測位電波が受信できない状態において、道路の状態に応じて例えば加速度センサ等のセンサの機能に誤差が生じる場合でも、正確に当該誤差を補正することが可能な補正装置を提供する。
【解決手段】車両に印加されている加速度を検出し、加速度データを生成する加速度センサ1と、加速度データを用いて速度を算出する速度算出部2と、現在位置を検出する位置検出部3と、現在位置に対応する道路の半径データを取得する取得部4と、進行方位を検出するジャイロセンサ5と、進行方位の変化量を算出する変化量算出部6と、道路データと進行方位の変化量とを用いて補正用速度を算出する補正用速度算出部7と、補正用速度を用いて速度算出部2を補正する補正部8と、を備える。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 測位装置が異なる保持状態にされた場合でも、適宜に方式を切り替えて測位を行うことのできる測位装置、測位方法およびプログラムを提供することにある。
【解決手段】 歩行体に保持されて測位を行う測位装置において、動きと方位に関する検出を行う自律航法用センサと、測位用衛星から信号を受信して測位を行う衛星測位手段と、自律航法用センサの出力に基づき相対的な位置変化を求めて測位を行う自律測位手段(S4〜S6,S8〜S10)と、当該測位装置の保持状態を判別する保持状態判別手段(S3)と、前記衛星測位手段および前記自律測位手段を制御して前記歩行体の移動経路に沿った一連の位置データを作成するとともに、前記保持状態判別手段の判別結果に基づいて前記自律測位手段による測位の方式を切り替える測位制御手段とを備えている。
(もっと読む)
行動・状態モニタリング方法およびプログラム
【課題】ノイズ・外乱の要因に伴う一時的な誤検知や、一時的な行動・状態の変化を補正する。
【解決手段】人間や動物などの動体に装着した1または2以上の加速度センサの計測値の基本単位時間における特徴量を取得し、前記特徴量の、予め同条件で測定した教師データとしての計測値の特徴量に対するパターン認識により、前記基本単位時間における前記動体の行動・状態を推定し、前記基本単位時間を含み前記基本単位時間よりも長い補正単位時間において、前記基本単位時間における前記推定の結果と異なる特定の行動・状態が、予め決められた閾値より大きな頻度で発生しているとき、前記基本単位時間における行動・状態の前記推定の結果を、前記特定の行動・状態に置き換える。
(もっと読む)
停車判定装置
【課題】取り付ける車両によらず適切な停車判定を行うことが可能となる停車判定装置を提供する。
【解決手段】フラッシュメモリ28に閾値が設定されていなければ、ROM16bから初期値の閾値を読み出し、ジャイロセンサ12および加速度センサ13の各軸について検出された動き量が読み出された閾値以下の状態が所定時間継続した場合、停車していると判定し、検出された動き量に基づき閾値を決定し、決定された閾値をフラッシュメモリ28に更新記憶させ、次回はフラッシュメモリ28から閾値を読み出して停車判定を行う。
(もっと読む)
移動方向算出装置および移動方向算出プログラム
【課題】歩行者の動作が微少であっても、誤検出することなく正確な移動方向を算出すること。
【解決手段】移動方向算出装置110は、歩行者100の前後、左右、上下の各方向の加速度を検出する加速度センサ120の検出値を利用して歩行者が歩行中か否か、歩行中であれば、前後左右のいずれの方向に移動しているかを算出することができる。さらに、加速度センサの検出値を利用して歩行者の移動形態も特定するため、歩行者の移動状況を高精度に特定することができる。
(もっと読む)
慣性センサ
【課題】本発明は、慣性センサの検知精度を向上させることを目的とする。
【解決手段】そして、この目的を達成するために本発明は、角速度センス信号を出力する角速度センサ9と、加速度センス信号を出力する加速度センサ10と、前記角速度センス信号と前記加速度センス信号とを出力する出力回路部19とを備え、前記出力回路部19が同一タイミングで検出された前記角速度センス信号と前記加速度センス信号とを1つの信号の塊として時間的に対応付けるべく時分割方式にてデジタル出力する構成としたものである。
(もっと読む)
1 - 10 / 36
[ Back to top ]