
国際特許分類[G01C7/04]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | プロフィルの追跡 (220) | 地表面の (124) | 追跡されるプロフィルに沿って移動する乗物を含むもの (57)
国際特許分類[G01C7/04]に分類される特許
1 - 10 / 57
三次元レーザ計測システムおよび路面の縦断プロファイルの作成方法
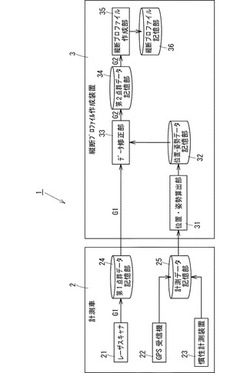
【課題】複雑で時間のかかるキャリブレーションを必要とせずに、高精度の路面の縦断プロファイルを作成できる移動式の三次元レーザ計測システムを提供する。
【解決手段】本発明の計測システムでは、以下の3段階のステップで路面の縦断プロファイルを作成する。最初に、計測車2に搭載されたレーザスキャナ21を用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データG1を取得する。次に、第1の三次元点群データG1を、計測車2に搭載されたGPS受信機22および慣性計測装置23を用いて取得したデータに基づいて修正して、地理座標系で表示された第2の三次元点群データG2を作成する。最後に、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データG3を切り出し、この第3の三次元点群データG3に基づいて、路面の縦断プロファイルを作成する。
(もっと読む)
レーザオルソ画像生成装置及びレーザオルソ画像生成のプログラム並びにレーザオルソ画像生成方法

【課題】高密度のレーザデータを用いてオルソフォトと同様な画像を容易に得ることができるレーザオルソ画像作成装置を得る。
【解決手段】移動に伴って周囲に数センチ間隔でレーザデータを発射して得た高密度のレーザデータ(x、y、z、反射強度in、RGB値、発射時間、受信時間)を記憶したデータベース10と、メッシュレイヤ作成処理部11と、レーザデータ投影処理部12と、道路部分抽出処理部13と、レーザオルソ画像作成部14と、データエリア図表示部15等を備えて、画像メモリのピクセルに含まれるレーザデータを決定し、このレーザデータ群の中から所定のレーザデータの反射強度に基づく色(グレースケール等)をそのピクセルに付与し、道路面を鉛直からみたレーザオルソ画像を作成する。また、道路面のレーザオルソ画像においては、道路部分以外の点を除去する。
(もっと読む)
路面勾配算出装置及び方法
【課題】走行する移動体上でリアルタイムに、かつ、高精度に路面勾配を算出できる路面勾配算出装置及び方法を提供すること。
【解決手段】路面勾配算出装置10は、移動体に設置され、GPS衛星からGPS搬送波を受信するGPS受信機101と、移動体の略重心位置に設置され、3次元の角速度と加速度とを求めるためのデータを出力するIMU102とを備える。そして、路面勾配算出装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した速度の水平方向の速度を積算し、水平方向相対距離を算出し、算出した速度の垂直方向の速度を積算し、垂直方向相対距離を算出し、算出した水平方向相対距離が所定の水平方向距離になる区間ごとに、算出した水平方向相対距離と、算出した垂直方向相対距離とに基づいて、路面勾配を算出する。
(もっと読む)
三次元点群計測方法、三次元点群計測プログラム
【課題】GPS測位演算によりFix解が得られている場合であっても、GPS衛星が元々有する測位誤差要因により測位精度の劣化が生じている。静止測量では長時間の静止によって平均的な解を求めることで精度の劣化を低減できるが、移動体測量では静止ができない、あるいは低速で走れないことが通常であるので、静止測量のように時間平均により精度劣化を抑えることができない。
【解決手段】同じ走行路を複数回走行し、各走行でのレーザ点群の結果において位置が変化しない固定物を基準点とし、基準点が重ね合わさるように点群を伸縮する。この際、位置精度の信頼度で重み付けを行い、その平均的な結果を真値として扱う。また、走行中は常にGPS衛星の状態が変化するので、一点で補正するのではなく一定間隔ごとに固定物を特定して、各走行ごとに位置補正量を算出する。
(もっと読む)
凹凸平面の測量方法及び測量装置
【課題】道路規制をすることなく、簡易にかつ正確に道路等の凹凸平面を測量できる。
【解決手段】子機10は、車軸4に2つの車輪5を設けて移動可能な基体1の上に360°プリズム7を取り付けてなり、車軸4の直上にプリズム7の中心8が位置する。親機は、子機10のプリズム7の中心8を追尾して、プリズム7の中心8にレーザーを発射して反射させて受信して、その位置情報を取得できるようになっている。基準点Pに親機20を置き、道路を横断する測定線Sに沿って子機10を走行させると、レーザーの受信により子機10の平面位置、高さを座標(X,Y,Z)として取得できる。測定線に沿って多数の測定点で座標情報(X,Y,Z)を得れば、測定線Sに沿った断面(平面位置及び高さ)を測量できる。
(もっと読む)
道路勾配推定装置
【課題】片側の白線のみからでも車両前方の道路の道路勾配を推定可能な道路勾配推定装置を提供する。
【解決手段】画像処理部4で抽出した白線が破線であるとき、その白線のペイント部分と非ペイント部分の境界である端点を抽出する端点抽出部6と、視点変換処理を行い、車両前方の道路の道路勾配が、車両が走行している位置での道路勾配で一定であると仮定したときの各端点の見かけ上の位置を求める視点変換処理部7と、隣り合う端点間の見かけ上の距離と、予め求めた隣り合う端点間の実際の距離とに基づき、各端点間の勾配を求める端点間勾配取得部9と、端点間勾配取得部9が求めた各端点間の勾配に、車両が走行している位置での道路勾配を足し合わせることで、端点間の実際の道路勾配を求める道路勾配演算部10と、を備えた。
(もっと読む)
樹木位置検出装置、樹木位置検出方法、及びプログラム
【課題】森林上空から把握される樹冠形状に基づいて個々の樹木の位置を精度良く把握することは容易でない。
【解決手段】上空からレーザパルスを掃射し、その反射信号波形を計測する航空レーザ計測により取得された森林の三次元の点群データを用いて樹木の位置を検出する。点群データが表す高さを地表からの実質高さに換算して正規化点群データを生成する(S52)。森林の樹冠領域とその下の枝下領域とでの正規化点群データの分布の違いに基づいて、森林内で一定した高さ範囲を枝下層として設定する(S54)。枝下層に属する正規化点群データを抽出し、地表に沿った平面に投影して二次元頻度分布を求める(S56)。所定基準に基づいて、二次元頻度分布にて正規化点群データが集まる箇所を検出して樹木位置とする(S58)。
(もっと読む)
地物の3次元データ生成方法及び地物の3次元データ生成システム
【課題】Web環境下において、サーバコンピュータの負担が少なく、ユーザが、衛星画像データから地物の3次元データを容易に作成することのできるようにする。
【解決手段】地上の任意の3次元座標値の地点が撮影されている左右の衛星画像データの座標位置をRPCモデル13に基づいて計算し、座標位置が撮影された左右の衛星画像データをサーバコンピュータ1に要求する第1のステップと、サーバコンピュータ1から入手した左右の衛星画像を撮影した各衛星の位置を結ぶ線分をステレオ基線とみなし、左右の衛星画像の座標位置同士を一致させた状態で、左右の衛星画像をステレオ基線の方向ベクトルと左右の衛星画像のスキャン方向とのなす角度だけ回転させてステレオ表示した場合に、左右の衛星画像の座標位置に写る地物が一致していれば、当該地物の3次元座標値が地上の地点の3次元座標値であると決定する第2のステップと、を備えた。
(もっと読む)
道路構造測定方法および道路面測定装置
【課題】走行した道路の勾配などの道路構造幾何情報を低コストで簡便に取得し、道路画像処理に用いる高精度な座標変換テーブルを生成することが困難であった。
【解決手段】本発明の道路構造測定方法は、車両の世界座標系位置を取得し、道路を走行する車両の画像を撮像し、撮像された画像から前記車両の画像座標系位置を取得し、車両が実際に走行した走行距離を取得し、車両の画像座標系位置及び世界座標系位置と道路形状を表す道路構造幾何モデルとに基づき車両が走行した走行距離を計算し、車両が実際に走行した走行距離と、計算された走行距離のずれに基づいて道路構造幾何モデルのパラメータを推定することにより、道路構造特徴を計側する。
(もっと読む)
走行路面形状測定データの処理方法
【課題】同一波長の走行路面変位が繰り返し連続する区間を効率的に管理するための、走行路面形状測定データの処理方法を提供する。
【解決手段】地点xにおける走行路面変位の測定波形f(x)を求め、この測定波形f(x)に波長λの正弦波が繰り返し現れる場合、その繰り返しを検出するために、次式(A)を用いてF(x)を算出し(Mは想定する繰り返し数であるが、処理後、前記波形F(x)の直流分を残すために、Mは偶数とする。α(N)は、ユーザーが定める係数である。)、この結果に基づいて繰り返しを考慮した、走行路形状の管理値を判定する。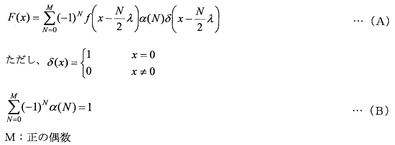 (もっと読む)
(もっと読む)
1 - 10 / 57
[ Back to top ]