
国際特許分類[G01S17/48]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波以外の電磁波の反射または再放射を使用する方式 (1,905) | 電波以外の電磁波の反射を使用する方式 (1,005) | 物標の位置データを決定する方式 (889) | 位置データの間接的な決定 (134) | アクティブ三角測量方式,即ち,電波以外の電磁波の送信および反射を使用する方式 (118)
国際特許分類[G01S17/48]に分類される特許
111 - 118 / 118
光学式測距センサ及び電気機器

【課題】 測距対象物が至近距離範囲内に存在するにもかかわらず、通常の測距範囲内に存在するとの誤った検知が行われる不都合を防止できる光学式測距センサを提供すること。
【解決手段】 光学式測距センサ1は、発光ダイオード2と、発光ダイオード2からの光を集光して測距対象物に照射する投光レンズ3と、測距対象物からの反射光を集光する受光レンズ4と、受光レンズ4によって集光された光を受ける受光素子5とを備える。受光素子5から2つの信号電流I1、I2を受けた信号処理回路7は、測距対象物までの距離Dを表す出力信号Sと、測距対象物が至近距離範囲内に有るか否かを示す至近距離信号Nとを出力する。出力信号Sのうちの所定の閾値Tに対応する距離Dが、至近距離範囲内と測距範囲L内との両方に存在する場合においても、至近距離信号Nを参照することにより、測距対象物の距離Dを正確に検知できる。
(もっと読む)
移動ロボットの距離および位置検出装置

【課題】光を用いた2つの方法により周囲距離および自己位置検出をより正確に行う。
【解決手段】移動ロボット1が光ビーコン3の光信号の規定領域BAに入っていないときには、ジャイロセンサ16の出力する角速度を積分して求めた方位角及びステッピングモータ12の駆動用パルスの計数値に対応する移動距離に基づいて移動ロボット1の位置を求めているので、如何なる位置でも求めることができる。また、移動ロボット1が光信号の規定領域BAに入っているときには、光信号による三角測量を行って、光ビーコン3からの移動距離LBを求め、この移動距離LB及び規定領域BAに基づいて移動ロボット1の位置を高精度で求めて更新する。移動ロボット1が光ビーコン3の光信号の規定領域BAに入っていないときには、光信号による三角測量を行って、周囲距離を測定する。
(もっと読む)
検知装置
【課題】領域内において検知した物体が障害物であるか否かを短時間で精度よく判断でき、かつ設備費用を削減できる検知装置及び検知方法を提供する。
【解決手段】検知装置は、所定の領域を走査するレーザレーダ10と、このレーザレーダ10により検知される距離情報とその走査方向の情報とから3次元レーダ情報を求めるレーダ情報作成手段21と、3次元レーダ情報から所定の領域内に存在する物体を検知する物体検知手段22と、所定の領域を、物体の進行方向に対して複数に分割された分割領域として認識する領域認識手段23と、分割領域の1つに所定時間継続して少なくとも1つの物体が滞留したときに、障害物が滞留していると判断する障害物判断手段24とを備えたことを特徴とする。
(もっと読む)
走行ロボットの位置感知装置及びこれを備えたロボット掃除機
【課題】走行ロボットの位置感知装置に係り、特に、走行における障害物との距離を感知する上で、外部の妨害光線が障害物として誤認されることを防止しうる走行ロボットの位置感知装置及びこれを備えたロボット掃除機を提供する。
【解決手段】走行ロボットの位置感知装置は、光を反射させた障害物との距離に従って異なる位置に光を結像させるように構成された受光素子と、障害物から反射されて前記受光素子に入射する光を、直進するように放出させ、前記受光素子に入射される外部の妨害光線による虚像の障害物が前記有効感知範囲外に位置するようにその妨害光線に対して角度を与えて光を放出する発光素子と、前記受光素子に入射した光の結像位置から前記障害物との距離を演算する信号処理装置と、前記位置感知装置で感知された距離の走行時変化を考慮してその距離に障害物が存在するかを判断する誤信号処理装置と、を備える。
(もっと読む)
カメラ
【課題】構造が簡単なカメラを提供すること。
【解決手段】特定の輻射パターンを持つ投射光を被写体に照射するストロボ505、506を有し、ストロボ505、506の被写体反射光を撮像し、撮像した画像の光強度を用いて奥行き画像を得る、形状計測用または被写体抽出用のカメラであって、ストロボ505、506の発光なしの状態にて動画像を撮像し記録メディアに録画できるビデオカメラ533を兼ねており、ストロボ505、506が発光した時に撮像した画像データにインデックス信号を付加しておき、インデックス信号が付加された特定の画像のみを用いて奥行き画像を算出する。
(もっと読む)
光電スイッチ
【課題】小型化を図りつつ受光信号の処理に関する値を容易かつ正確に認識することができる光電スイッチを提供することである。
【解決手段】 ケーシング10の前面部14には、検出領域に光を投射するとともに検出領域からの帰還光を受ける投受光部20が設けられている。ケーシング10の背面部13には、表示部30および2つのプッシュ式の調整スイッチ50が設けられている。ケーシング10内において回路基板100の背面側に回路基板101,102が配置され、回路基板101,102は回路基板100に対して垂直に取り付けられている。表示部30はケーシング10に一体的に形成された透明の窓部35を有し、窓部35に対向するように回路基板100が配置される。回路基板100上には複数のLED31が取り付けられ、LED31上に7セグメントカバー32が配置される。
(もっと読む)
移動制御システム
本発明は、車両またはロボットアームなど移動プラットフォームの制御に使用できる移動制御システムに関する。本発明は特に車両用の運転支援、車両用のセルフパーキング支援システムに利用できる。3次元カメラ(12)がプラットフォーム、例えば車(102)上に置かれ、プラットフォームまわりの環境を撮像する(114)ように配置される。プロセッサ(7)が3次元情報を用いて環境モデルを生成し、このモデルを利用して移動制御信号を生成する。好ましくは、プラットフォームは環境に対して移動し、様々な位置からの環境の複数の画像を取得する。 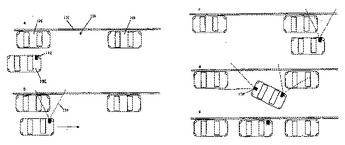 (もっと読む)
(もっと読む)
位置検出デバイス
n個のセグメントと、光検出要素アレイのセグメントからの出力値(OV)を比較することによって、最大強度を有するセグメントを識別するように構成されるパラレル算術処理部とを有する光検出要素アレイを備える位置検出デバイス。パラレル算術処理部は、最大強度を有するセグメントが選択されるまでセグメントを順に選択/除外するように構成される少なくとも1つの比較段を備え、第1段は、入力セグメント(IS)としてそれぞれの光検出要素セグメントから出力値OVを受け取り、追加段は、入力セグメントISとして先行する段から出力値OVを受け取る。その位置検出デバイスを備えるレンジファインダもまた提供される。 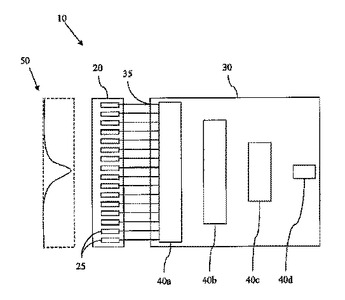 (もっと読む)
(もっと読む)
111 - 118 / 118
[ Back to top ]