
国際特許分類[G01S19/26]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 衛星電波ビーコン測位システム;当該システムから送信される信号を用いた,位置,速度または姿勢の決定 (1,115) | タイムスタンプメッセージを送信する衛星電波ビーコン測位システム,例.GPS [Global Positioning System], GLONASS[Global Orbiting Navigation Satellite System] or GALILEO (817) | 受信機 (636) | 当該システムが送信する信号の捕捉または追尾 (211) | 捕捉または追尾を補助するセンサー測定を含むもの (13)
国際特許分類[G01S19/26]に分類される特許
1 - 10 / 13
無線端末装置及び位置測位方法
【課題】ネットワーク環境に応じて測位方式を適切に選択できる無線端末装置及び位置測位方法を提供すること。
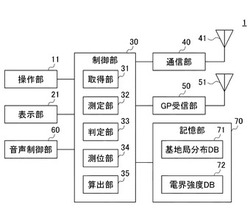
【解決手段】携帯電話機1は、複数の測位方式のいずれかを選択して位置測位を行う測位部34を備え、測位部34は、位置測位を要求された際に、所定の測位サーバと通信可能なCDMAで位置登録されている場合、要求された測位方式により位置測位を行い、所定の測位サーバと通信不可能なLTEで位置登録されている場合、測位サーバを利用しないStandalone方式により位置測位を行う。
(もっと読む)
電波発射源推定方向表示装置及び電波発射源推定方向表示方法

【課題】電波発射源による電波を受信した際に、地図上における自己の位置及び自己の位置に対する電波発射源の推定方向を容易に認識することができる電波発射源推定方向表示装置を提供する。
【解決手段】電波発射源からの電波を受信するアンテナ部と、到来方向を推定する到来方向推定処理部7と、アンテナ部の位置情報を取得するGPS受信機10と、アンテナ部の方位情報を取得する方位センサ11と、GPS受信機10により取得された位置情報に基づいてアンテナ部周辺の地図情報を取得するとともに、到来方向推定処理部7により推定された到来方向と方位センサにより取得された方位情報とに基づいてアンテナ部で受信した電波の到来方位を算出し、算出した到来方位とアンテナ部の位置とを取得した地図情報に重ね合わせて出力する地図表示処理部12と、アンテナ部で受信した電波の到来方位及びアンテナ部の位置を示した地図を表示する表示部13とを備える。
(もっと読む)
衛星信号捕捉方法及び受信装置
【課題】衛星信号の捕捉を適切に行うための新たな手法の提案。
【解決手段】GPS衛星からのGPS衛星信号を受信した受信信号を用いて、第1のドップラー周波数である仮ドップラー周波数を算出する。そして、加速度センサーを少なくとも含むセンサー部の計測結果を用いて慣性航法演算を行う慣性航法装置の算出結果と、仮ドップラー周波数とを用いて、第2のドップラー周波数である補助ドップラー周波数を算出する。そして、補助ドップラー周波数を用いてドップラー周波数を算出して、GPS衛星信号を捕捉・追尾する。
(もっと読む)
受信装置
【課題】衛星から受信した信号の精度を早期に推定する技術を提供する。
【解決手段】アンテナ10は、少なくともひとつの衛星から送信された信号を受信する。周波数弁別部28は、受信した信号において発生しうるドップラーシフトの範囲にわたって周波数が変化するローカル信号を発生する。周波数弁別部28は、ローカル信号によって、受信した信号を周波数変換する。周波数弁別部28は、周波数変換した信号をエンベロープ検波する。周波数弁別部28は、エンベロープ検波した信号をしきい値と比較する。CPU20は、比較の結果、しきい値以上の値になっている信号成分の数を計数することによって、受信した信号の送信元になる衛星の数を推定する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】正確に補正された計時時刻によってGPS衛星の送信電波を速やかに捕捉することのできる測位装置、測位方法およびそのプログラムを提供する。
【解決手段】計時を行う計時手段と、受信手段を介して測位衛星から時刻情報を間欠的に受信させる受信制御手段(S1)と、受信された時刻情報に基づき計時手段の計時時刻を修正する時刻修正手段(S14)と、受信された時刻情報と計時手段の計時時刻とに基づいて計時手段の単位時間当たりの誤差(“α/β”)を算出する誤差算出手段(S12,S13)と、算出された単位時間当たりの誤差(“α/β”)に基づき計時手段の計時時刻から誤差を除去した補正時刻を求める時刻補正手段(S4)と、補正時刻を使用して前記測位衛星の信号を捕捉するとともに当該捕捉した信号に基づき位置の測定を行う測位手段(S5〜S8)とを備える。
(もっと読む)
衛星信号追尾方法、位置算出方法、衛星信号追尾装置及び位置算出装置
【課題】衛星信号追尾用のループフィルターのループバンド幅を適切な値に設定するための新たな手法を提案すること。
【解決手段】携帯型電話機1において、IMU60により移動状況が検出される。また、ホストCPU30により、IMU60の想定される最大の検出誤差である想定最大検出誤差が算出される。そして、ベースバンド処理回路部20の処理部27により、IMU60の検出結果及び想定最大検出誤差を用いて、GPS衛星から受信したGPS衛星信号を追尾するための追尾用ループ回路のループフィルター部のループバンド幅が設定される。
(もっと読む)
衛星信号追尾方法、位置算出方法、衛星信号追尾装置及び位置算出装置
【課題】衛星信号追尾用のループフィルターのループバンド幅を適切な値に設定するための新たな手法を提案すること。
【解決手段】携帯型電話機1において、IMU60により移動状況が検出される。また、ホストCPU30により、IMU60の想定される最大の検出誤差である想定最大検出誤差が算出される。そして、ベースバンド処理回路部20の処理部27により、IMU60の検出結果及び想定最大検出誤差を用いて、GPS衛星から受信したGPS衛星信号を追尾するための追尾用ループ回路のループフィルター部のループバンド幅が設定される。
(もっと読む)
測位用受信装置
【課題】本発明は、直接波とノイズを精度良く判別することができる、測位用受信装置の提供を目的とする。
【解決手段】スペクトラム拡散された信号をGPS衛星などの測位用衛星から受信する測位用受信装置であって、車速に応じて決められた時間内にアンテナ1によって受信した信号と拡散コードとの相関値を算出する相関器3と、相関器3によって算出された相関値の変化が車速と相関しているか否かによって、車速に応じて決められた時間内に受信した信号が直接波であるのかノイズであるのかを判定する判定部6とを備えることを特徴とする、測位用受信装置。
(もっと読む)
位置算出方法及び位置算出システム
【課題】ドップラー周波数の変動を考慮して、相関処理を適切に行うことを可能にすること。
【解決手段】INSユニット50及びGPSユニット60により算出された速度と、速度/方位センサーユニット70,80により検出された速度とが統合されて位置算出システム1の速度が算出される。また、INSユニット50及びGPSユニット60により算出された速度誤差と、速度/方位センサーユニット70,80により検出された速度誤差とを用いてドップラー誤差が決定される。そして、GPA15により決定された速度を用いてドップラー周波数が決定されるとともに、決定されたドップラー誤差を用いて相関積算時間が決定される。そして、INSユニット50及びGPSユニット60により算出された位置が統合されて、位置算出システム1の位置が算出される。
(もっと読む)
位置算出方法及び位置算出システム
【課題】ドップラー周波数の変動を考慮して、相関処理を適切に行うことを可能にすること。
【解決手段】INSユニット50及びGPSユニット60により算出された速度と、速度/方位センサーユニット70,80により検出された速度とが統合されて位置算出システム1の速度が算出される。また、INSユニット50及びGPSユニット60により算出された速度誤差と、速度/方位センサーユニット70,80により検出された速度誤差とを用いてドップラー誤差が決定される。そして、GPA15により決定された速度を用いてドップラー周波数が決定されるとともに、決定されたドップラー誤差を用いて相関積算時間が決定される。そして、INSユニット50及びGPSユニット60により算出された位置が統合されて、位置算出システム1の位置が算出される。
(もっと読む)
1 - 10 / 13
[ Back to top ]