
国際特許分類[G01S3/782]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 方向性を有しない亜音波,音波,超音波,電磁波,または粒子放射の到来する方向を決定するための方位測定機 (828) | 電波以外の電磁波を用いるもの (136) | 方向の決定または所定の方向からの偏差の決定のための方式 (130)
国際特許分類[G01S3/782]の下位に属する分類
静止している検出器または検出方式から導かれた信号の振幅比較を用いるもの (9)
検出器または検出方式から導かれる信号の所望の状態を付与するために検出器または検出方式の指向特性の方向の調整を用いるもの (8)
方向に依存した変調特性を作り出す回転レチクルを用いるもの
回転または揺動ビーム方式を用いるもの,例.鏡,プリズムを用いるもの (1)
国際特許分類[G01S3/782]に分類される特許
1 - 10 / 112
自動追尾カメラシステム
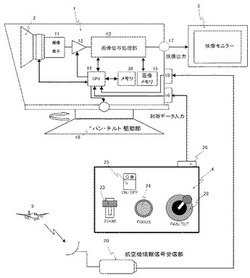
【課題】 被写体が移動路に進入する方向を検出し自動追尾撮影を行う自動追尾カメラシステムを提供する。
【解決手段】 自動追尾カメラシステムは、撮影手段と、撮影手段をパン又はチルト方向に回動させる駆動手段と、被写体情報信号を受信する信号受信手段と、映像から被写体を認識し、映像内での被写体の動きを検出する画像信号処理手段と、撮影手段と駆動手段と画像信号処理手段とを制御する制御手段と、移動路のそれぞれに対し、画像信号処理手段が被写体を検出するための待機位置を記憶する記憶手段を有し、制御手段は、被写体情報信号に基づいて被写体が進入する移動路・方角を演算し、記憶手段に記憶されている待機位置から対応する待機位置を選択し、待機位置に駆動手段及びレンズ装置を駆動し、画像信号処理手段が被写体を認識したら、検出された情報に基づき被写体を自動追尾するように駆動手段とレンズ装置を制御する。
(もっと読む)
誘導システム及び誘導方法

【課題】目標物が低熱源小目標であっても、精度よく飛しょう体を誘導する誘導システム及び誘導方法を提供する。
【解決手段】各索敵指令車1iを離れた距離に移動、展開させ(S11)、その展開後、索敵準備が完了したかを確認し(S12)、準備完了の確認後、各索敵指令車1iにおいて自己の位置を計測し(S13)、計測結果を各索敵指令車1iにて互いに配信する(S14)。各索敵指令車1iにおいて、互いの計測結果の受信完了を確認した場合には(S15)、それぞれの位置情報から相互の測角及び測距を計測し、その計測値を相互に補正する(S16)。そして、三角測量を用いて、より精密な目標物Oの位置を索敵する。この際、三角測量において、特に2点の測角は最も精度を必要とするため、さらに相互の測角を補正する。
(もっと読む)
対象物位置検出装置及び対象物位置検出方法
【課題】対象物から煙幕状に広がるフレアが射出された場合でも、その対象物の位置を的確に捕捉する。
【解決手段】対象物位置検出装置において、赤外線等の電磁波による画像データを取得し(100)、画像データの輝度情報に対して輝度閾値を超える領域を高輝度領域として抽出し(101)、抽出された高輝度領域の輪郭付近に注視曲線を設定し(102)、設定された注視曲線において対象物の有無を評価し対象物の位置を推定する(103)。これにより、煙幕状に広がるフレアが射出され対象物が隠された状態に陥っても、対象物を逃すことなく再捕捉し検出することができるようになる。
(もっと読む)
飛翔体監視装置、飛翔体監視訓練装置、飛翔体監視装置用データベース更新装置
【課題】飛翔体の飛行条件や衛星からの飛翔体観測条件が様々に変化した場合でもより可能性の高い飛翔体モデルを高い確度で選択することが可能な飛翔体監視装置を提供する。
【解決手段】地表上を飛ぶ飛翔体の上方の衛星からの観測方位を入力し該飛翔体の推定軌道(高度、速度:飛行条件、位置:観測条件)を出力する軌道推定装置6、飛翔体のハードウェアに関する情報からなる複数の飛翔体モデルを記録した飛翔体データベース7、各飛翔体モデルに対し推定軌道で表される飛行条件に応じた予測光源スペクトルを求める光源スペクトル算出手段8、各予測光源スペクトルに対して推定軌道で表される観測条件に応じた予測観測スペクトルを求める観測スペクトル算出手段9、実測の観測スペクトルと予測観測スペクトルを比較してスペクトル誤差を計算し、飛翔体データベースの中で最も可能性の高い飛翔体モデルを選択する比較装置10を含む。
(もっと読む)
物体検出装置
【課題】環境温度の変化に対応することにより誤検出を生じにくくした物体検出装置を提供する。
【解決手段】物体検出装置1は、センサ装置2から熱画像を取得する取得部11と、背景画像を記憶する記憶部12と、対象物3を検出する検出部13と、背景画像を更新する更新部15とを備えている。物体検出装置1は、現在の熱画像である取得画像と背景画像との差分を検出する背景差分法により、検出部13にて対象物3を検出する。更新部15は、対象物3が検出されなかった不検出領域については、最新の取得画像に基づいて背景画像を更新する。更新部15は、対象物3が検出された検出領域については、第1の背景更新処理によって更新された温度の変化量から補正値を求め、この補正値を用いて背景画像を更新する。
(もっと読む)
赤外線イメージセンサ及び赤外線撮像装置
【課題】赤外線撮像装置の分解能を向上することができる赤外線イメージセンサ及び赤外線撮像装置を提供する。
【解決手段】赤外線イメージセンサ11には、複数個の第1の画素1aが配列した第1の赤外線検知層1と、第1の赤外線検知層1上方に形成され、複数個の第2の画素2aが配列した第2の赤外線検知層2と、複数個の第1の画素1aの各々から信号を出力する第1の出力部3と、複数個の第2の画素2aの各々から信号を出力する第2の出力部4と、が設けられている。平面視で、複数個の第2の画素2aの配列が、複数個の第1の画素1aの配列からずれている。
(もっと読む)
目標検出装置および目標検出方法
【課題】目標の広がりを抑制し、近接目標の検出を可能とする目標検出装置を得る。
【解決手段】センサ部101による観測画像の各画素の尤度比算出部103と、当該尤度比と1フレーム前の各画素のトラック・スコアとVSM値と追尾予測値を用いて現フレーム画像のトラック・スコアを算出するトラック・スコア算出部と、次フレーム画像での予測位置を算出する追尾処理部105と、現フレーム画像の各画素のVSM算出部106と、競合が発生した場合に、競合関係にある画素のうち初探知化条件を満たす画素の初探知化処理を行う初探知化処理部107と、現フレーム画像の各画素のVSM値の大きさに基づくトラック・スコアの補正処理を行うトラック・スコア補正部108と、補正処理された現フレーム画像の各画素のトラック・スコアに対して閾値処理を行って目標画素を検出する検出処理部110とを備えている。
(もっと読む)
対象物位置推定装置
【課題】過大光の影響による誤誘導を低減することができる対象物位置推定装置を提供す
ることを目的とする。
【解決手段】本発明の対象物位置推定装置は、電磁波画像データを取得する画像データ取
得手段と、前記画像データの輝度情報に対して所定の閾値を超える領域を飽和領域として
抽出する飽和領域抽出手段と、前記飽和領域抽出手段によって得られた各飽和領域におい
て画像座標系に対する傾きベクトルを算出する領域傾斜算出手段と、前記傾きベクトルか
ら対象物の位置を推定する位置推定手段と、を有することを特徴とする。
(もっと読む)
信号処理装置
【課題】レンジパラメタライズド拡張カルマンフィルタを適用して目標の二次元角度情報からその三次元情報を推定する信号処理装置の計算量を低減する。
【解決手段】目標の二次元角度情報、及び二次元角度センサの位置情報から目標の三次元情報を推定する際に、その二次元角度情報が真の目標か誤警報等かを判定し、真の目標であると判定された場合に目標の三次元情報の推定処理を開始することにより、真の目標以外に対する、レンジパラメタライズド拡張カルマンフィルタによる不要な演算処理を抑制する。また、目標の概略距離を推定し、推定の対象とする距離範囲を限定した上でレンジパラメタライズド拡張カルマンフィルタによる推定処理を実行することにより、推定精度を劣化させることなく、並列動作させる拡張カルマンフィルタ数を少なくして計算量を低減する。
(もっと読む)
警報システム
【課題】従来技術においては火災などによって発生する高温領域などの存在を検知して警報出力することは可能であったが、特定の温度条件を満たす領域をダイナミックに設定して、人が近づいたことを検知して警報出力することはできなかった。
【解決手段】本発明の「警報システム」0100は、「熱画像カメラ」0101によって取得される設置空間内の温度分布と所定の温度条件に基づいて警報を出力するための「注目エリア」0102を設定し、人が注目エリアに対して「所定の範囲」0103まで近づいた場合にその人に対して警報を出力する構成を有する。当該構成により、特定の温度条件を満たす領域をダイナミックに設定し、人が近づいたことを検知して警報出力することが可能になる。
(もっと読む)
1 - 10 / 112
[ Back to top ]