
国際特許分類[G01S5/20]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 超音波,音波,亜音波を使用するもの (250) | 音波源の位置が離れて設けられた複数個の方向探知機により決定されるもの (29)
国際特許分類[G01S5/20]に分類される特許
1 - 10 / 29
超音波距離計測装置及び超音波距離計測方法
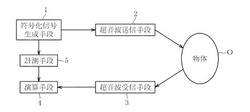
【課題】物体までの距離を高速かつ正確に計測することができる超音波距離計測装置及び超音波距離計測方法を提供する。
【解決手段】スペクトル拡散方式で物体Oの位置を計測する超音波距離計測装置である。第1の拡散符号により変調した第1超音波信号、・・・、第Nの拡散符号により変調した第N超音波信号を、一定時間毎に発生させる符号化信号生成手段1と、超音波信号を送信する超音波送信手段2と、物体に反射した超音波反射信号を受信する超音波受信手段3と、超音波信号の送信から受信までの時間を測定する計測手段5と、超音波反射信号と前記第1の拡散符号、・・・、及び第Nの拡散符号との相関を夫々計算し、超音波反射信号を受信した特定時に相関ピークを有する拡散符号により符号変調した超音波信号について、超音波信号が特定時前に最後に送信された送信時から、特定時までの時間差に基づいて、超音波受信手段から物体までの距離を演算する演算手段4とを備えた。
(もっと読む)
対象位置検出装置及び対象位置検出方法

【課題】雑音の影響を低減して対象の位置を検出できる対象位置検出装置を提供する。
【解決手段】定常的な雑音及び周囲に存在する対象から発生する対象発生音を含む音波を入力する音波入力部10と、単位時間毎の音波に基づいて対象の方向を示す複数の方向推定値を算出する方向推定部22と、方向推定値を方向毎に計量化することにより、第1計量化データを作成する計量化処理部23と、定常的な雑音に基づく方向推定値が方向毎に計量化されたデータとして、第2計量化データを記憶する計量化データ記憶部31と、第1計量化データから、第2計量化データを減算することにより、対象発生音に基づく方向推定値が方向毎に計量化されたデータとして、第3計量化データを作成する減算処理部24と、第3計量化データから対象の方向を検出する方向検出部25とを備える。
(もっと読む)
位置検出装置、ウェアラブルセンサシステム及びプログラム
【課題】簡単、安価な構成で高精度に位置検出を行う。
【解決手段】3個の受信機までの3つの距離をベクトルとしたデータベースが予め登録された記憶部と、各受信機が出力する送信機と各受信機との間の距離に依存する距離情報に基づいてデータベースを探索して初期位置を用いて連立非線形方程式を解いて移動部分の位置を検出する検知処理部は、距離情報をフィルタリングしてデータベースの探索用距離情報を取得する第1のカルマンフィルタと、動的に調整されて移動部分の位置状態を推定する位置状態推定用の第2のカルマンフィルタを含むように構成する。
(もっと読む)
音源推定方法及び音源推定装置
【課題】観測点で採取した音の音圧信号と映像信号とから音源を推定するとともに、推定された音源と観測点との距離をリアルタイムで算出する。
【解決手段】マイクロフォンM1〜M5とカメラとを備えた音・映像採取ユニットを第1の観測点P1に配置して音圧信号と映像信号とを採取し、マイクロフォンM6〜M9を備えた音採取ユニットを第2の観測点P2に配置して音圧信号を採取し、これらの音圧信号をA/D変換した音圧波形データを用いて推定した第1の観測点P1からみた音源方向の水平角θ1及び仰角φ1と第2の観測点P2からみた音源方向の水平角θ2とから第1の観測点P1と音源との距離Lを求めるとともに、第1の観測点P1で採取した映像信号をA/D変換した画像データと水平角θ1と仰角φ1とを用いて作成した画像中に音源の方向を示す図形が描画された音源推定用画像Gkと距離Lのデータとを表示画面に表示するようにした。
(もっと読む)
水中位置探知システム、水中位置探知システムに用いられる超音波発信手段および船側受信手段、ならびに水中位置探知方法
【課題】母船から見たダイバーの3次元的な位置を正確に把握することを可能とする水中位置探知手段を提供する。
【解決手段】水中位置探知システム11は、ダイバーA側に取り付けられる超音波発信装置12から発信される超音波20を、船S側に設けられる船側受信装置13によって受信し、水中におけるダイバーAの位置を探知するためのシステムである。ここで、船側受信装置13は、複数の超音波マイクロフォン18を有する超音波受信装置21と、発信同期信号22Sと超音波信号との間の時間差τを出力する比較装置23と、比較装置23によって出力された時間差τに基づいて、ダイバーAと超音波マイクロフォン18との間の距離Lを計算する距離演算装置24と、距離Lに基づいてダイバーAの3次元座標を計算する座標演算装置25と、ダイバーAの座標を画像に表示する画像表示装置26とを有する。
(もっと読む)
目標物探知システム、探知方法、及び探知情報処理プログラム
【課題】レーダ,ソナー,又はライダーから成る送受信機を備えた目標物探索システムにあって、S/N比が低く反射信号が雑音に埋設されそうな環境下にあっても、目標物を有効に捕捉することを可能とした目標物探知システムを提供すること。
【解決手段】方位設定が可能で異なる設置位置にそれぞれ配置された目標物探索用の少なくとも二個の送受信機1,2と、この各送受信機1,2により探索された目標物Mの方位にかかる反射情報に基づいて当該目標物Mの位置を特定する位置算出手段12を備えた主制御装置10とを設け、前記位置算出手段12が、前記二個の送受信機1,2によって得られた目標物Mの方位にかかる情報を、前記各送受信機1,2の位置情報を基準として重ね合わせ処理することにより前記目標物Mの位置を特定する機能を備えていることを特徴とする。
(もっと読む)
音源位置特定方法
【課題】 ネットワーク配線に加えて、マイクロホン接続のための追加配線を不要する、音源位置特定方法を提供する。また複数個あるマイクロホンで2種類以上のクロックを用いても音源位置特定を可能にした、音源位置特定方法を提供する。
【解決手段】 監視カメラ1、11は、マイクロホン2、3、12、13を有し、マイクロホン2、3、12、13により受音したオーディオ信号を元に音源方向情報を求め、サーバー20は、監視カメラ1、11で求められた音源方向情報に基づき、音源位置情報を特定する。
(もっと読む)
目標運動解析方法及び目標運動解析装置
【課題】目標運動解析の解の収束を早め、解の精度を向上させること。
【解決手段】本発明の目標運動解析方法は、センサにて前記目標を探知する探知ステップと、前記センサにて探知された前記目標の探知方位及び探知周波数、該探知された探知時刻、及び、該探知時刻における前記センサの位置情報を含む目標探知情報を生成する生成ステップと、前記センサにて信号を受信可能な探知領域を計算する計算ステップと、前記センサの目標探知情報及び探知領域を使用し、前記センサの探知領域と前記目標の探知方位とが重なる領域を前記目標の存在圏と限定した上で、前記目標の位置を推定する第1の推定ステップと、を有する。
(もっと読む)
位置検出装置、位置検出方法およびプログラム
【課題】被検出部周辺の環境を考慮した被検出部の音速の算出を行い、位置の検出対象とする部分付近の音速をできるだけ正確に測定し、それを用いての位置の検出精度を高める。
【解決手段】ロボットハンド101の先端部分104に超音波送信装置を配置し、さらに先端部分104を含むことが可能な多面体131〜133を設定し、それらの頂点に超音波送受信装置111〜126を配置する。先端部分104の位置検出にあたり、先端部分104に近い頂点を特定点として選択し、この特定点に向かう他の頂点からの経路の音速を算出する。この音速に基づいて、先端部分104から特定点への経路における音速を算出し、この音速の値と、先端部分104と特定点との間における超音波の伝播時間とに基づいて、先端部分104の特定点からの距離を算出する。この距離を複数の特定点について得ることで、先端部分104の位置を特定する。
(もっと読む)
位置検出装置、位置検出方法およびプログラム
【課題】被検出部周辺の環境を考慮した被検出部の音速の算出を行い、位置の検出対象とする部分付近の音速をできるだけ正確に測定し、それを用いての位置の検出精度を高める。
【解決手段】ロボットハンド101の先端部分104に超音波送信装置を配置し、さらに先端部分104を含むことが可能な多面体131〜133を設定し、それらの頂点に超音波送受信装置111〜126を配置する。先端部分104の位置検出にあたり、先端部分104に近い頂点を特定点として選択し、この特定点に向かう他の頂点からの経路の音速を算出する。この音速に基づいて、先端部分104から特定点への経路における音速を算出し、この音速の値と、先端部分104と特定点との間における超音波の伝播時間とに基づいて、先端部分104の特定点からの距離を算出する。この距離を複数の特定点について得ることで、先端部分104の位置を特定する。
(もっと読む)
1 - 10 / 29
[ Back to top ]