
国際特許分類[G06T15/40]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | 3D[三次元]イメージレンダリング[6,2011.01] (1,787) | 幾何学的効果[6,2011.01] (71) | 隠れた部分の除去[6,2011.01] (53)
国際特許分類[G06T15/40]に分類される特許
1 - 10 / 53
描画装置
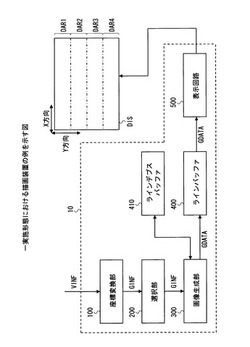
【課題】 画素のデータを記憶するバッファのメモリサイズを小さくする。
【解決手段】 描画装置は、図形の頂点情報を受け、図形の2次元表示面における座標を示す位置情報を少なくとも含む図形情報を頂点情報に基づいて生成する座標変換部と、座標変換部から図形情報を受け、図形の所定方向の描画範囲を図形情報に基づいて算出し、2次元表示面を分割した分割領域毎に、分割領域に描画される図形の図形情報を出力する選択部と、選択部から出力された図形情報に基づいて、分割領域の画像データを生成する画像生成部と、画像生成部により生成された画像データを記憶するラインバッファとを有している。
(もっと読む)
仮想環境でのオクルージョンを推定する方法

【課題】仮想環境でのアンビエントオクルージョンをライブで推定して現実感のある表示の生成に必要な計算時間および/または計算パワーを最適化する。
【解決手段】仮想環境の点P16でのオクルージョンを推定するための方法に関し、点P16は、視点11から見える仮想環境の各点のうちの少なくとも幾つかをグループ化する表面Sに存在する。必要な計算時間を最小限としながら表示を改善するために、表面Sと基点として点P16を有する複数の半直線との交点403を推定するステップであって、交点403が複数の半直線の各半直線40を離散化することで推定されるステップ表面Sとの交点を有する複数の半直線の各半直線にオクルージョン因子を関連付けるステップであって、該因子が各交点403と点P16を隔てているオクルージョン距離Δ0の関数であるステップ、推定された交点403から点P16でのオクルージョンを推定するステップを含む。
(もっと読む)
カバレージ表示装置、カバレージ表示システムおよびカバレージ表示プログラム
【課題】3次元空間に存在する物体により伝播が遮られる場合のカバーエリアをユーザが正確かつ短時間に把握できるよう視覚化するカバレージ表示装置、カバレージ表示システムおよびカバレージ表示プログラムを得る。
【解決手段】距離計算部8は、装置オブジェクト20のカバーエリアをスキャンし、各スキャン方向で装置オブジェクト20に最も近い隠蔽オブジェクト21までの距離Aを求めて距離マップ9を生成する。カバーエリア描画部11は、装置オブジェクト20からカバーエリアの任意部分までの距離Bを求め、B≦Aならその部分は隠蔽オブジェクト21に隠蔽されないと判断して非隠蔽色で描画し、B>Aなら隠蔽されると判断して隠蔽色で描画する。
(もっと読む)
隠蔽処理プログラム、可視化処理方法及び装置
【課題】時系列に計算された計算値の可視化データをより把握しやすくする。
【解決手段】仮想三次元空間に配置される、各計算点の計算値についての可視化データに対する隠蔽面のデータを生成する。そして、各計算点の位置及び当該計算点の計算値と、複数の計算点を含む要素における特徴的な点の位置とを時系列データとして格納する数値データ格納部から、ユーザ指定位置の隠蔽面における所定の点に最も近い点の位置である注目点位置に対応する識別情報を読み出し、数値データ格納部から、当該識別情報に対応する、各時刻の注目点位置を読み出し、ユーザの視線方向と読み出された注目点位置とから、当該視線方向に垂直で且つ隠蔽面の所定の点が注目点位置となるように、各時刻において隠蔽面を配置する。そして、可視化データに係るポリゴンデータと隠蔽面に係るポリゴンデータとを時系列に描画させる。
(もっと読む)
図形処理装置
【課題】図形ブーリアン演算の演算誤差の発生を抑制して、3次元形状オブジェクトの見える部分を構成しているポリゴンの形状を正確に抽出することができる図形処理装置を得ることを目的とする。
【解決手段】ポリゴン形状出力部7が、遮蔽判定処理部6によりポリゴンの面が輪郭形状により遮蔽されていないと判定された場合、そのポリゴンの形状を出力し、遮蔽判定処理部6によりポリゴンの面の一部が輪郭形状により遮蔽されていると判定された場合、そのポリゴンの面と輪郭形状間で図形ブーリアン演算を実施することで、その輪郭形状に遮蔽されている面が除かれているポリゴンを生成して、そのポリゴンの形状を出力する。
(もっと読む)
立体映像調整装置及び調整方法
【課題】オクルージョン領域の推定や情報を保持することなく、ステレオ画像における前景と背景の視差量を調整する。
【解決手段】
立体映像調整装置は、複数のカメラで前景物体と背景物体が撮影され、ステレオマッチングの対応点が取られた画像に対して、前景物体が写っている画像領域と前景物体との重畳によって別の視点位置からは隠ぺいされる背景の領域を合わせた領域を通過する画像勾配の小さい領域を連結したパスを複数本取得する手段と、背景画像において画像勾配の小さい領域を連結したパスを複数本取得する手段と、それらのパス上のピクセルを削除または複製することによって、ステレオ視を行った際に前景物体と背景物体の奥行量の差が異なる疑似画像を作成する手段を備える。
(もっと読む)
オブジェクト管理装置及びオブジェクト管理方法
【課題】AR技術において、オブジェクトの表示処理の負荷を軽減すると共に、オブジェクトを視認し易い表示画面を提供する。
【解決手段】オブジェクト管理装置1では、位置情報取得部10により位置情報が取得され、不可視構造物判別部12により、仮想空間における構造物から不可視構造物が判別され、非表示オブジェクト制御部15により、不可視構造物に対応付けられたオブジェクトに非表示フラグが付加される。これにより、オブジェクトの表示処理を実施する際に、非表示フラグが付されたオブジェクトを表示させないといった制御が可能となる。従って、オブジェクトを表示するときの表示処理の負荷が軽減されると共に、表示効率が向上する。また、表示不要なオブジェクトを表示させないように制御することができるので、整然としたオブジェクトの表示画面を提供することが可能となる。
(もっと読む)
柄癖可視化装置、柄癖可視化方法、及びプログラム
【課題】 表面に凹凸模様を有する媒体の柄癖を、画像にて確認可能な柄癖可視化装置、意匠確認方法、及びプログラムを提供する。
【解決手段】 柄癖可視化装置1において、制御部3は、入力されたハイトフィールドに対して、操作者により設定されるか、或いは予め定められた一つまたは複数の角度方向に視点及び光源により生じる陰影及びオクルージョンを画素毎に判定する。陰影及びオクルージョンとなる画素については輝度値を例えば0とする。陰影及びオクルージョンがない画素については、注目画素の周囲の画素からの影響を考慮して、光源からの拡散反射、鏡面反射の各成分を足し合わせた輝度値を算出する。更に制御部3は、算出された各画素の輝度値を、例えば濃淡情報や色相情報等として表した画像を出力する。この結果、陰影及びオクルージョンを考慮し、柄癖を正確に表した画像を生成できる。
(もっと読む)
ポリゴン処理装置,プログラム及び情報記録媒体
【課題】 本発明は,必要なポリゴンの形状を変化させずに,描画に用いられないポリゴン情報を削除するポリゴン処理装置を提供することを目的とする。
【解決手段】 本発明は,あるポリゴンから複数の走査線を発生させ,その全ての走査線がポリゴンにより遮られるか否か判断する。そして,全ての走査線が遮られたポリゴンは,他のポリゴンに囲まれ,描画されないポリゴンであると推測し,描画のための処理を行わない。本発明は,上記のような処理を行うことで,必要なポリゴンの形状を変化させず,簡単な処理により,描画に用いられないポリゴンを描画対象から除外することができるという知見に基づくものである。
(もっと読む)
描画装置
【課題】計算負荷を小さくすることのできる描画装置を提供する。
【解決手段】三角形のエッジ関数をfi(x、y)=aix+biy+ciとし、重なり判定対象の矩形領域の幅と高さを2w、2hとしたとき、D[fi]=|ai|w+|bi|hという値を考える。そして、矩形領域の中心座標を(xd、yd)として、fi(xd、yd)とD[fi]との大小関係をすべてのエッジについて調べることにより、三角形と矩形領域が重なるか否かを判定する。
(もっと読む)
1 - 10 / 53
[ Back to top ]