
国際特許分類[G06T7/00]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | イメージ分析,例.ビットマップから非ビットマップへ (10,245)
国際特許分類[G06T7/00]の下位に属する分類
動きの分析 (2,724)
テクスチャの分析 (315)
イメージからの幾何学的属性の分析,例.面積,重心,周囲長の分析 (1,881)
国際特許分類[G06T7/00]に分類される特許
101 - 110 / 5,325
箱詰め物検査方法および箱詰め物検査装置
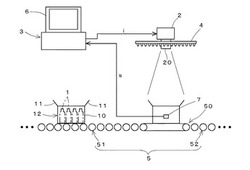
【課題】箱詰めされる物品の種類、形状、重量などを問わず、物品や仕切板の欠落など、種々の箱詰め不良を非接触で検出することを可能とする。
【解決手段】複数個のガラスびん1が整列された状態で箱詰めされる箱詰め物12の箱詰め状態を検査する。準備工程では適正な箱詰め状態の箱詰め物12を撮像して得られる基準画像について各ガラスびん1が整列配置される位置に検査領域をそれぞれ設定して、各検査領域内の基準画像についての濃度分布に関する情報を抽出することにより検査領域毎の基準となる情報を取得する。検査工程では検査対象の箱詰め物12を撮像して得られる検査対象画像について各ガラスびんが整列配置される位置に検査領域をそれぞれ設定して、各検査領域内の検査対象画像についての濃度分布に関する検査情報を抽出した後、各検査情報を前記基準となる情報と対比して箱詰め状態の適否を判別する。
(もっと読む)
印影照合プログラム、印影照合装置及び印影照合方法

【課題】2個印が押印されている場合であっても、取消し線が重ね書きされた印影ではなく、押印し直した印影を正しい照合印影画像として抽出することで、印影照合の照合率を向上させることが可能な印影照合プログラム、印影照合装置及び印影照合方法を提供すること。
【解決手段】画像読取装置で読み取った媒体上に押印された印鑑の印影を印影画像データとして入力し、前記入力した印影画像データから、円形状検出処理を用いて印鑑枠相当部分を抽出し、前記入力した印影画像データから、前記抽出した印鑑枠相当部分の外周に接続する印鑑枠外周接続線を抽出し、印鑑枠外周接続線を抽出した場合、前記入力した印影画像データを、データベースに登録された登録印影画像と照合するための照合印影画像として適切でないと判断する。
(もっと読む)
対象物種別判定装置
【課題】対象物の種別判定に要する演算負荷の軽減及び種別判定時間の短縮を図ることができる対象物種別判定装置を提供する。
【解決手段】赤外線カメラ2Rにより撮像された撮像画像から対象物の対象物領域Rを抽出し、対象物領域R内の運動判断領域Pについての輝度プロファイルJnを作成する(STEP106)。現在よりΔT前に作成した輝度プロファイルJoをメモリから読出し、Jn,Joの特徴量の差異が所定値以上であるか否かを判定する。所定値以上の差異があれば、対象物は生体(例:歩行者)であると判定し(STEP110)、なければ、現在よりΔT/2前に作成した輝度プロファイルJhをメモリから読出し、Jn,Jhの特徴量の差異が所定値以上であるか否かを判定し、所定値以上の差異があれば、対象物は生体であると判定し、なければ、対象物は生体でないと判定する。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60は、ショベル60の動作状態を検出する動作状態検出部65と物体検出装置100とを備える。物体検出装置100は、複数のカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。また、物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60の動作状態に応じて配置される。
(もっと読む)
画像処理装置
【課題】パターンマッチングの対象となるブロックサイズが異なる場合においても、その信頼性を正当に評価する。
【解決手段】画像処理装置120のマッチング処理部172は、一対の画像データそれぞれから、対象物の相対距離に応じた大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定する。信頼性評価部174は、特定されたブロックの信頼性を示す評価値をブロックの大きさに基づいて1または複数導出する。そして、正規化部176は、導出された評価値を、その評価値の最大値が基準ブロックにおける評価値の最大値の面積比となるように正規化し、特定されたブロックに関連付ける。こうして、マッチング処理部172によって導出される視差を、正規化された評価値で正当にフィルタリングすることが可能となる。
(もっと読む)
物体検出方法及び物体検出装置
【課題】演算コストがより低い物体検出装置を提供すること。
【解決手段】2つのカメラ2a、2bのそれぞれが撮像するカメラ画像2aR、2bRの視差に基づいて物体50を検出する物体検出装置100は、被撮像空間を通る仮想直線VL上の複数の検査点IP1〜IP5のうちの1つIP1に対応する画素を含む部分画像2aR1、2bR1をカメラ画像2aR、2bRから抽出する部分画像抽出部10と、同一の検査点IP1に対応するカメラ画像2aR、2bRの部分画像2aR1、2bR1同士の類似度に基づいて検査点IP1に関する評価値CGRAを決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体50の存否を判定する物体存否判定部12とを備える。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する平面形状のタガント(微小細粒)を物品に付与し、その分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、タガントをランダムに配置しておき、各物品をスキャナ等により光学的に読み取り、タガントの画素数(第1画素数)とタガントの特徴点を抽出し、基準特徴点データとして記憶しておく。識別対象となる物品を上述と同様の手法で読み取り、抽出されたタガント候補領域の中から、タガントの所定の画素数(第1画素数)と近似しない画素数を有するタガント候補領域をノイズとして除去する。その後、対象物品のタガント候補領域の特徴点を抽出する。そして、抽出した対象物品特徴点のデータと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
画像マッチング装置及び画像マッチングプログラム
【課題】特徴ベースの画像マッチングにおいて、誤対応付けの影響を減らすことができる画像マッチング装置を提供する。
【解決手段】クエリ画像と、検索対象データベース内に予め保存された保存画像のそれぞれから抽出した特徴箇所毎に特徴量を算出する特徴表現手段と、クエリ画像と、保存画像間において、特徴表現手段により算出した特徴量からスコアを算出し、クエリ画像の特徴箇所に対応する保存画像へのスコア投票結果に基づき画像マッチングを行う照合手段とを備えた画像マッチング装置であって、照合手段は、クエリ画像と保存画像間において特徴箇所の対応付けの確からしさを示すスコアを投票し、スコア投票結果に基づき画像マッチングを行って、クエリ画像とマッチングする保存画像を求める。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より確実に物体を識別できるようにする。
【解決手段】処理対象画像の注目画素の画素値Xは、画素値を構成する各色成分を軸とする特徴空間の観測点に写像される。識別装置では特徴空間の任意の観測点に対して、その観測点に写像される画素値Xの真値がYである尤度と、ノイズのない肌領域の画素の画素値の肌確率分布とが予め用意されており、これらに基づいて注目画素が肌領域の画素であるかが識別される。すなわち、注目画素の画素値Xに対して用意された尤度から画素値Xの真値がYである真値確率分布が求められ、真値確率分布と肌確率分布との畳み込みにより求められた、注目画素が肌領域の画素である確率に基づいて、注目画素が肌領域の画素であるかの識別が行なわれる。本技術は、識別装置に適用することができる。
(もっと読む)
101 - 110 / 5,325
[ Back to top ]