
国際特許分類[H02P6/06]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 回転子の位置に依存する電子整流子を有する同期電動機または他の電動機の制御装置;それに用いる電子整流子 (4,020) | 電動機速度を測定し,それを与えられた物理量と比較することで電動機速度を調整する単一電動機の速度調整装置 (353)
国際特許分類[H02P6/06]に分類される特許
1 - 10 / 353
H型ブリッジ回路およびモータ駆動装置
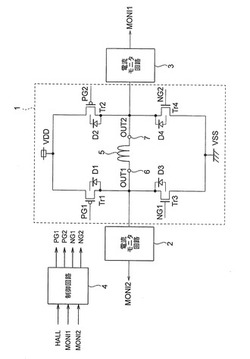
【課題】モータに適用した場合に、回転効率を犠牲にすることなく、逆流電流の発生を防止できるようにしたH型ブリッジ回路などの提供。
【解決手段】この発明は、MOSトランジスタTr1〜Tr4からなるH型ブリッジ1と、電流モニタ回路2、3と、制御回路4とを備える。電流モニタ回路2、3のそれぞれは、コイル5に流れる電流を検出し、この検出に応じた信号を電流判定信号MONI1、電流判定信号MONI2として出力する。制御回路4は、コイル5の通電方向を切り換える切換信号HALLと、電流モニタ回路2、3から出力される電流判定信号MONI1、MONI2とを基に、制御信号PG1、PG2、NG1、NG2を生成し、MOSトランジスタTr1、Tr2をオンオフ制御する。
(もっと読む)
電気自動車のモータ制御装置

【課題】 埋込磁石型同期モータにおいて、永久磁石の減磁が生じた場合に、モータ駆動力の低下を抑えることのできる電気自動車のモータ制御装置を提供する。
【解決手段】 モータ6のロータの永久磁石の磁力を推定する磁力推定手段38と、その判定手段39と、減磁対応タイミング変更手段40とを、インバータ装置22またはECU21に設ける。磁力推定手段38は、モータ回転数、モータ電圧、およびモータ電流の内の少なくとも2つの検出信号から、定められた規則に従い、磁力の推定を行う。判定手段39は、減磁であるか否かを判定する。減磁対応タイミング変更手段40は、判定手段39による減磁であるとの判定結果に応じて、インバータ装置22によるモータ駆動につき、モータのリラクタンストルクが増大するように、ロータの位相に対する最大電流を流すタイミングを変更する。
(もっと読む)
電気掃除機
【課題】応答性の高いインバータにより吸込み圧力を制御することにより、作業性の高い掃除機を実現すること。
【解決手段】交流電源1より与えられる交流電力は直流に変換された後、インバータ回路4に入力され任意の周波数の3相交流に変換され、接続されたモータ5およびファン6を任意の回転数で駆動する。電流制御手段9は、モータ5に流れる電流を所望の電流値になるように制御する。さらに圧力制御手段10は、掃除機の吸込み圧力を検出する圧力センサ8の検出値を外部より与えられる目標圧力指示値になるようにモータ5に流れる電流値の目標値を設定することにより、モータ5に流れる電流を制御することによって、掃除機の吸込み圧力を掃除作業性に最適な圧力値に制御することができる。
(もっと読む)
同期電動機の制御装置及び制御方法
【課題】駆動する永久磁石同期電動機が任意のモータであっても、弱め界磁制御と最大トルク制御との切り換えを安定して行うことができる同期電動機の制御装置及び制御方法を提供する。
【解決手段】最大線間電圧演算部11によって演算された最大線間電圧VmaxとPMモータ1の電気角速度ωeとを用いて弱め界磁制御用のd軸電流演算値を演算するd軸電流演算部12と、最大線間電圧VmaxとPMモータ1の電気角速度ωeとに基づいて、弱め界磁制御用のd軸電流演算値と最大トルク制御用のd軸電流設定値とのいずれかをd軸電流指令値Id*として出力させる弱め界磁制御切換部13とを設ける。また、d軸電流演算部12によって、最大線間電圧Vmaxと、PMモータ1の電気角速度と、PMモータ1のモータパラメータである逆起電力係数及びd軸インダクタンスとからd軸電流演算値を演算する。
(もっと読む)
モータ制御装置
【課題】PWM制御における搬送波周期内で、2相の電流の高周波成分を確実に検出できるように3相のPWM信号パターンを生成可能なモータ制御装置を提供する。
【解決手段】実施形態によれば、電流検出素子をインバータ回路の直流側に接続して電流値に対応する信号を発生させ、PWM信号生成手段は、モータ磁極位置に追従するように3相のPWM信号パターンを生成する。電流検出手段が電流検出素子に発生した信号とPWM信号パターンとに基づいてモータの相電流を検出すると、PWM信号生成手段は、電流検出手段が、PWM信号の搬送波周期内における4点のタイミングで2相の電流をそれぞれ2回検出できるように3相のPWM信号パターンを生成する。更に電流微分手段が、前記2相のそれぞれについて2回検出した電流値の差を電流微分値として出力すると、磁極位置推定手段は、その電流微分値に基づいてモータの磁極位置を推定する。
(もっと読む)
像担持体駆動装置、その制御方法、および制御プログラム、並びに画像形成装置
【課題】コストが増加することなく、しかもエネルギー損失を低減して、ランダムな外乱に像担持体を良好に追従させる。
【解決手段】ブラシレスDCモータ10によって感光体ドラム100などの像担持体が駆動される。エンコーダ113によって像担持体の駆動速度が検出され、制御器400、モータドライバIC300、および駆動回路200は駆動速度と予め設定された目標速度とに応じてブラシレスDCモータに流す駆動電流を制御する。また、制御器、モータドライバIC、および駆動回路は、ブラシレスDCモータを制動するためのショートブレーキ信号がオンであると、ブラシレスDCモータに流す駆動電流と逆向きの電流を生じさせてブラシレスDCモータ駆動モータの制動を行う。
(もっと読む)
DCモータ及びこれを備えたポンプ
【課題】低損失・低ノイズとする。
【解決手段】磁界発生用のコイル27と、コイルへの通電をPWM制御する制御部2を有するとともに、前記コイルへの通電によって回転駆動されるロータと、前記ロータの回転角を検知する回転角検知手段3と、前記ロータの回転速度を検出する回転速度検出手段4とを備えており、前記制御部2は前記回転角検知手段と前記回転速度検出手段からの出力信号を受けて、PWMキャリア周波数を決定するとともに外部からの能力可変信号に合わせてPWM制御のデューティを決定し、決定したPWMキャリア周波数とデューティで前記コイルへの電力供給を行う。
(もっと読む)
ブロアモータ駆動装置
【課題】ブロアモータ側に付いている制御装置の基準クロックである動作クロックの精度が低いブロアモータ制御装置でも、実回転速度の検出誤差を抑制し、バラツキの少ない回転動作を可能とする。
【解決手段】上位システムからPWM信号デューティ比を用いて、目標回転速度を与えられるブロアモータ駆動装置であり、PWM信号の周期誤差を算出し、位置検出センサから算出されたロータ回転速度を、周期誤差に基づき乗算補正し速度制御を実施する。
(もっと読む)
永久磁石回転電機及びその運転方法
【課題】高速時の誘導起電力の低減と低速時の高トルク特性が可能な永久磁石回転電機。
【解決手段】本発明は、電機子巻線23を8極にして所定の短時間だけ大電流の磁化電流を流すことによって発生する磁界により可変磁力磁石それぞれを同一方向に着磁させ、磁石トルク主体の8極PMモードとし、電機子巻線を4極にして所定の短時間だけ磁化電流を流すことによって発生する磁界により4個の可変磁力磁石を隣り合う磁石間で互いに逆方向に磁化させて磁石トルクとリラクタンストルクの両方で動作する4極IPMモードとし、電機子巻線を4極にして所定の短時間だけ磁化電流を流すことによって発生する磁界により4個の可変磁力磁石を消磁してリラクタンストルクのみで動作する4極RMモードとし、起動時及び速度領域の移行時にこれら8極PMモード、4極IPMモード及び4極RMモードの間で相互にモードを切り替えて可変速運転する永久磁石回転電機。
(もっと読む)
DCブラシレスモータ
【課題】商用交流電源などのAC電源の直接入力が可能で、その商用電源の周波数に応じた速度で駆動が可能なAC入力のDCブラシレスモータを提供する。
【解決手段】本発明のAC入力のDCブラシレスモータは、駆動巻線と可動子とを少なくとも有するモータ部と、駆動巻線に駆動電力を供給するパワー素子と、駆動電力を制御するパワー制御部と、速度制御信号を発生する速度制御部と、商用交流電源が入力される端子部とを備え、パワー制御部は速度制御信号によりパワー素子の通電量を制御し、速度制御部は端子部に入力される商用交流電源の周波数に基づいて速度制御信号をパワー制御部に出力し、モータ部とパワー素子とパワー制御部と速度制御部とを少なくとも内蔵して、端子部への商用交流電源の接続によって商用電源周波数に応じた速度で駆動される。
(もっと読む)
1 - 10 / 353
[ Back to top ]