
エレベータ

【課題】非接触給電装置からの給電が不足した状態であっても、バッテリを充電して運転を継続することのできるエレベータを提供する。
【解決手段】昇降路10内にカウンタウエイト12に接触して給電を行う接触式給電装置25a,25bを設置すると共に、制御装置18に非接触給電装置23−1,23−2,…23−nの給電効率を監視する給電効率監視部と、非接触給電装置23−1,23−2,…23−nの給電効率が一定値以下に低下した状態が検出された場合に、接触式給電装置25a,25bによる給電に切り換えて運転を行う運転制御部とを備える。
【解決手段】昇降路10内にカウンタウエイト12に接触して給電を行う接触式給電装置25a,25bを設置すると共に、制御装置18に非接触給電装置23−1,23−2,…23−nの給電効率を監視する給電効率監視部と、非接触給電装置23−1,23−2,…23−nの給電効率が一定値以下に低下した状態が検出された場合に、接触式給電装置25a,25bによる給電に切り換えて運転を行う運転制御部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、カウンタウエイトに受電装置を備え、昇降路内に設置された非接触給電装置から電力を非接触で受けるエレベータに関する。
【背景技術】
【0002】
近年、非接触給電方式を適用したエレベータが普及している。特に、カウンタウエイトに受電装置を備え、昇降路内に設置された非接触給電装置から電力を非接触で受けて動作するエレベータがある。
【0003】
この種のエレベータでは、カウンタウエイトにバッテリとモータを備えており、通常時はバッテリに蓄えられた電力でモータを駆動して運転動作する。そして、給電時は昇降路内に設置された給電装置とカウンタウエイトに設置された受電装置とを対向させ、非接触給電装置から非接触で電力を受け、これをバッテリに蓄えるようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−163533号公報
【特許文献2】特開2002−249285号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したような非接触給電方式のエレベータにあっては、非接触給電装置に何らかの異常が生じると、給電不足でバッテリ残量が足りなくなり、運転を継続できなくなる問題がある。
【0006】
また、非接触給電装置では一度に大量の電力を供給できない。このため、出勤時間帯などで高負荷運転などが連続すると、バッテリ残量が足りなくなり、運転を継続できなくなる可能性もある。
【0007】
本発明が解決しようとする課題は、非接触給電装置からの給電が不足した状態であっても、バッテリ残量を確保して運転を継続することのできるエレベータを提供することである。
【課題を解決するための手段】
【0008】
実施形態に係るエレベータは、昇降路内を乗りかごと共に昇降動作するカウンタウエイトに非接触で電力を供給する非接触給電装置を備えたエレベータにおいて、上記カウンタウエイトに接触して給電を行う接触式給電装置と、上記非接触給電装置の給電効率を監視する給電効率監視手段と、この給電効率監視手段によって上記非接触給電装置の給電効率が一定値以下に低下した状態が検出された場合に、上記接触式給電装置による給電に切り換えて運転を行う運転制御手段とを具備する。
【図面の簡単な説明】
【0009】
【図1】図1は第1の実施形態に係るエレベータの構成を示す図である。
【図2】図2は同実施形態におけるエレベータの制御装置の機能構成を示すブロック図である。
【図3】図3は同実施形態におけるエレベータの運転動作を示すフローチャートである。
【図4】図4は同実施形態におけるエレベータの接触式給電方式の動作を示すフローチャートである。
【図5】図5は同実施形態におけるエレベータの待機時の処理動作を示すフローチャートである。
【図6】図6は第2の実施形態におけるエレベータの運転動作を示すフローチャートである。
【図7】図7は同実施形態におけるエレベータの別の運転動作を示すフローチャートである。
【図8】図8は第3の実施形態におけるエレベータの運転動作を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照して実施形態を説明する。
【0011】
(第1の実施形態)
図1は第1の実施形態に係るエレベータの構成を示す図であり、2:1ローピンク形式のエレベータの構成が示されている。
【0012】
昇降路10の中に乗りかご11とカウンタウエイト(吊り合い錘)12が設けられており、それぞれに図示せぬガイドレールに昇降動作可能に支持されている。乗りかご11は、かご下にシーブ14を有しており、そのシーブ14の下側に一端が昇降路頂上部に固定されたロープ13が架設されている。
【0013】
このロープ13は、昇降路頂上部に設けられたシーブ15を介してカウンタウエイト12に設けられたトラクションシーブ16に巻回され、その他端部を昇降路頂上部に固定している。これにより、乗りかご11とカウンタウエイト12を2:1ローピンク形式で支持している。
【0014】
また、カウンタウエイト12には、モータ17、制御装置18、バッテリ19が搭載されている。モータ17は、乗りかご11とカウンタウエイト12を昇降動作させるための駆動装置である。このモータ17の回転軸に取り付けられたトラクションシーブ16が回転することで、トラクションシーブ16に巻回されたロープ13を介して乗りかご11とカウンタウエイト12がつるべ式に昇降動作する。
【0015】
制御装置18は、モータ17の駆動制御を含むエレベータ全体の制御を行う。なお、この制御装置18の機能構成については、後に図2を参照して説明する。バッテリ19は、エレベータの駆動に必要な電力を蓄える。
【0016】
また、本実施形態において、昇降路10にはカウンタウエイト12に非接触で所要の電力を供給するための給電システム20が設けられている。
【0017】
この給電システム20は、三相交流電源21に接続された複数の電源装置22−1,22−2,…22−nと、これらの電源装置22−1,22−2,…22−nに接続された非接触給電装置23−1,23−2,…23−nとからなる。
【0018】
電源装置22−1,22−2,…22−nは、建物の各階に対応して設けられており、それぞれに三相交流電源21から供給される電力をエレベータの駆動に必要な電力に変換する。
【0019】
非接触給電装置23−1,23−2,…23−nは、乗りかご11が各階で停止しているときのカウンタウエイト12の位置に合わせて昇降路10内に配設されている。これらの非接触給電装置23−1,23−2,…23−nは、カウンタウエイト12に設けられた受電装置24と対向したときに非接触で給電を行う。
【0020】
なお、非接触給電の方式としては、例えば電磁誘導方式が用いられる。「電磁誘導方式」は、2つの隣接するコイルの一方(給電側コイル)に電流を流したときに発生する磁束を媒介として他方のコイル(受電側コイル)に送電する方式である。この他に、電流を電磁波に変換し、アンテナを介して送電する「電波方式」や、電磁界の共鳴現象を利用した「電磁界共鳴方式」などがあるが、本発明ではこれらの方式に特に限定されるものではない。
【0021】
また、図1の例では、各階に非接触給電装置23−1,23−2,…23−nが設置されているが、その個数は任意であり、例えば最上階と最下階にだけ設置しておくことでも良い。
【0022】
このような構成において、カウンタウエイト12に搭載されたバッテリ19から電力を得ることで、モータ17を駆動して乗りかご11とカウンタウエイト12を運転動作させる。また、乗りかご11が各階で停止したときに、非接触給電装置23−1,23−2,…23−nの中でカウンタウエイト12に設けられた受電装置24と対向した非接触給電装置を通じて電力を受け、その電力をバッテリ19に蓄える。
【0023】
ここで、非接触給電装置23−1,23−2,…23−nは、カウンタウエイト12側の受電装置24と精度良く向かい合っていないと給電できない。また、何らかの異常が発生して、著しく給電効率が低下すると、バッテリ不足となり、エレベータを正常に運転できなくなる。
【0024】
このような事態に備え、本実施形態における給電システム20には、上述した非接触給電装置23−1,23−2,…23−nとは別に接触式給電装置25a,25bが設けられている。
【0025】
接触式給電装置25a,25bは、通常の運転時にカウンタウエイト12が接触しない位置に設けられている。具体的には、接触式給電装置25aは、昇降路10内の底部付近で、通常の運転時にカウンタウエイト12が最下階で停止する位置よりも下の位置に設置されており、カウンタウエイト12の下端部に設けられた受電装置26aと接触することで、電源装置22−1から供給される電力をカウンタウエイト12に与える。
【0026】
接触式給電装置25bは、昇降路10内の頂部付近で、通常の運転時にカウンタウエイト12が最上階で停止する位置よりも上の位置に設置されており、カウンタウエイト12の上端部に設けられた受電装置26bと接触することで、電源装置22−nから供給される電力をカウンタウエイト12に与える。
【0027】
接触式給電装置25a,25bから受電装置26a,26bを通じて給電された電力は、カウンタウエイト12に搭載されたバッテリ19に蓄えられる。
【0028】
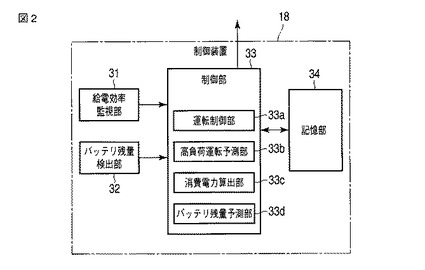
図2はエレベータの制御装置18の機能構成を示すブロック図である。
【0029】
制御装置18は、CPU、ROM、RAMなどを備えたコンピュータによって構成される。この制御装置18には、給電効率監視部31と、バッテリ残量検出部32と、制御部33と、記憶部34とが設けられている。
【0030】
給電効率監視部31は、非接触給電装置23−1,23−2,…23−nの給電効率を監視している。バッテリ残量検出部32は、カウンタウエイト12に搭載されたバッテリ19の残量を検出する。
【0031】
制御部33は、エレベータ全体の制御を行う部分であり、ここでは非接触給電に関わる機能構成として、運転制御部33a、高負荷運転予測部33b、消費電力算出部33c、バッテリ残量予測部33dを有する。
【0032】
運転制御部33aは、エレベータの運転動作を制御するものであり、非接触給電装置23−1,23−2,…23−nの給電効率が一定値以下に低下した状態が検出された場合に接触式給電装置25a,25bによる給電に切り換えて運転を行う。
【0033】
また、高負荷運転予測部33bは、運転時の消費電力が高い高負荷運転を予測する。消費電力算出部33cは、乗りかご11を目的階まで運転したときの消費電力を算出する。バッテリ残量予測部33dは、バッテリ19の残量と目的階までの消費電力とに基づいて、乗りかご11が目的階に到着した時点のバッテリ19の残量を予測する。
【0034】
記憶部34は、エレベータの運転動作に必要な情報(例えば、時刻、行先階、荷重など)を記憶する。
【0035】
次に、第1の実施形態の動作について説明する。
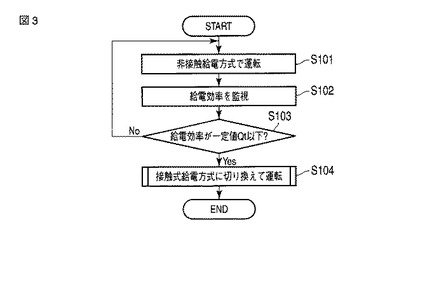
図3は第1の実施形態におけるエレベータの運転動作を示すフローチャートである。
【0036】
通常、制御装置18は、非接触給電方式でエレベータの運転を行う(ステップS101)。すなわち、乗りかご11が各階で停止したときに、非接触給電装置23−1,23−2,…23−nの中でカウンタウエイト12に設けられた受電装置24と対向した非接触給電装置を通じて電力を受け、その電力をバッテリ19に蓄えながら、モータ17を駆動して乗りかご11とカウンタウエイト12を運転動作させる(ステップS101)。
【0037】
このとき、制御装置18は、給電効率監視部31を通じて非接触給電装置23−1,23−2,…23−nの給電効率を監視している(ステップS102)。給電効率は、非接触給電装置23−1,23−2,…23−nから実際に得られた電力の量を計測することで求める。また、別の方法として、以下のようなセンサを用いて給電効率を求めても良い。
【0038】
(1)地震や強風などでカウンタウエイト12が揺れると、非接触給電装置23−1,23−2,…23−nと受電装置24との間隔が一時的に開いて、給電効率が低下する。そこで、非接触給電装置23−1,23−2,…23−nと受電装置24との間隔を光学的に検出するギャップセンサを用い、そのギャップセンサの検出信号の変化から給電効率を算出する。この場合、上記間隔が長くなるほど、給電効率が悪くなる。
【0039】
(2)非接触給電として電磁誘導方式を用いている場合、コイルに金属等の異物が混入していると、磁束が乱れて給電効率が低下する。そこで、非接触給電装置23−1,23−2,…23−nの磁束を検出する磁束検出センサを用い、その磁束検出センサの検出信号の変化から給電効率を算出する。この場合、上記磁束の量が少なくなるほど、給電効率が悪くなる。
【0040】
(3)カウンタウエイト12はロープ13によって吊り下げられているため、ロープ13の伸びによって非接触給電装置23−1,23−2,…23−nと受電装置24との位置合わせにずれが生じる。この位置ずれを光学的に検出する位置検出センサを用い、その位置検出センサの検出信号の変化から給電効率を算出する。この場合、上記位置ずれが大きいほど、給電効率が悪くなる。
【0041】
ここで、非接触給電装置23−1,23−2,…23−nの給電効率が一定値Qt以下に低下した場合(ステップS103のYes)、制御装置18は、運転に支障が出るものと判断し、接触式給電方式に切り換えて運転する(ステップS104)。なお、上記Qtの値は、例えば正常時の給電効率の約半分に設定されているものとする。
【0042】
図4はエレベータの接触式給電方式の動作を示すフローチャートである。
【0043】
接触式給電方式運転に切り換えられると、まず、制御部33は、呼びの有無を検出する(ステップS201)。ここで言う「呼び」とは、乗場呼びとかご呼びとの両方である。「乗場呼び」とは、各階の乗場に設置された乗場呼び釦の操作により登録される呼びの信号のことであり、登録階と行先方向の情報を含む。「かご呼び」とは、かご室内に設けられた図示せぬ行先呼び釦の操作により登録される呼びの信号のことであり、行き先階の情報を含む。
【0044】
ここで、呼びのない状態が一定時間(例えば10分)継続した場合に(ステップS202のYes)、制御部33は、エレベータの利用者がいないものと判断し、モータ17を駆動してカウンタウエイト12を接触式給電可能な位置に移動させる(ステップS203)。
【0045】
「接触式給電可能な位置」とは、図1の例では、接触式給電装置25a,25bの設置位置であり、具体的には最下階より下の位置と最上階より上の位置である。この場合、乗りかご11が待ち状態で停止しているときのカウンタウエイト12の位置が最下階に近ければ、カウンタウエイト12の下端部に設けられた受電装置26aを接触式給電装置25aに接触させるようにカウンタウエイト12を下降方向に移動させる。逆に、カウンタウエイト12の位置が最上階に近ければ、カウンタウエイト12の上端部に設けられた受電装置26bを接触式給電装置25bに接触させるようにカウンタウエイト12を上昇方向に移動させる。
【0046】
このようにして、受電装置26aと接触式給電装置25aとの接触、あるいは、受電装置26bと接触式給電装置25bとの接触により電力がカウンタウエイト12に供給されると、制御部33は、その電力をバッテリ19に蓄えた後(ステップS204)、カウンタウエイト12を待機させる(ステップS205)。このときの待機位置は、図5に示すように、バッテリ19の残量に応じて設定される。
【0047】
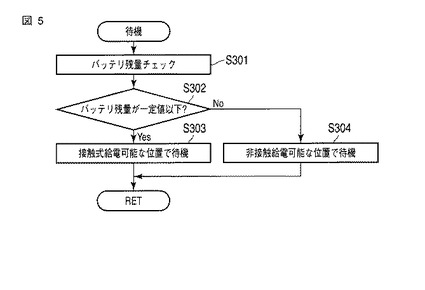
図5はエレベータの待機時の処理動作を示すフローチャートである。
【0048】
カウンタウエイト12を待機させる場合において、制御部33は、バッテリ残量検出部32を通じてバッテリ19の残量をチェックする(ステップS301)。その結果、バッテリ19の残量が一定値(例えば半分)以下の状態であれば(ステップS302のYes)、制御部33は、カウンタウエイト12を接触式給電可能な位置で待機させる(ステップS303)。
【0049】
上述したように、「接触式給電可能な位置」とは、接触式給電装置25a,25bの設置位置であり、どちらか近い位置にカウンタウエイト12を待機させるようにモータ17を駆動制御する。
【0050】
一方、バッテリ19の残量が一定値より多い状態であれば(ステップS302のNo)、制御部33は、カウンタウエイト12を非接触式給電可能な位置で待機させる(ステップS304)。
【0051】
「非接触式給電可能な位置」とは、非接触給電装置23−1,23−2,…23−nの設置位置であり、これらの中で近い位置にカウンタウエイト12を待機させるようにモータ17を駆動制御する。
【0052】
このように第1の実施形態によれば、非接触給電方式での運転中に何らかの異常が発生して給電効率が著しく低下した場合でも、接触式給電方式に切り換えることで、バッテリ残量を確保してエレベータの運転を継続することができる。
【0053】
また、呼びのない状態でカウンタウエイト12を待機させる場合に、バッテリ残量が少ない場合には接触式給電可能な位置を待機位置として設定することで、バッテリ19を急速充電して次の運転に備えることができる。一方、バッテリ残量が十分である場合には通常の運転時と同様に非接触式給電可能な位置を待機位置として設定することで、呼びがあったときにすぐに応答することができる。
【0054】
(第2の実施形態)
次に、第2の実施形態について説明する。
【0055】
第2の実施形態では、高負荷運転が連続すると予測される場合に接触式給電方式に切り換えて運転するものである。
【0056】
エレベータの構成は図1と同様である。ここでは、図6および図7を参照してエレベータの運転動作について説明する。
【0057】
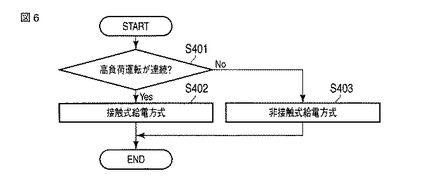
図6は第2の実施形態におけるエレベータの運転動作を示すフローチャートである。
【0058】
エレベータを運転する際に、制御部33は、高負荷運転が連続するか否かを判断する(ステップS401)。これは、時刻や行先階、荷重などの情報から消費電力が予めバッテリ容量から定めた基準値よりも高くなる時間帯や運転パターンを学習しておき、その学習した時間帯や運転パターンの条件と一致する場合に高負荷運転が連続するものと予測するものである。
【0059】
上記時間帯としては、出勤時、昼休み時、退勤時などがある。また、上記運転パターンとしては、行先階までの距離が長く(ロングラン)、定格荷重に近い状態で力行運転するようなパターンである。
【0060】
高負荷運転が連続すると予測された場合(ステップS401のYes)、制御部33は、接触式給電方式に切り換えてエレベータを運転する(ステップS402)。すなわち、図4で説明したように、呼びのないときにカウンタウエイト12を接触式給電可能な位置に移動させ、接触式給電装置25a,25bから電力を受け、その電力をバッテリ19に蓄えながら、モータ17を駆動して乗りかご11とカウンタウエイト12を運転動作させる。
【0061】
一方、高負荷運転が連続しないと予測された場合(ステップS401のNo)、制御部33は、非接触給電方式のままでエレベータを運転する(ステップS402)。すなわち、乗りかご11が各階で停止したときに、非接触給電装置23−1,23−2,…23−nの中でカウンタウエイト12に設けられた受電装置24と対向した非接触給電装置を通じて電力を受け、その電力をバッテリ19に蓄えながら、モータ17を駆動して乗りかご11とカウンタウエイト12を運転動作させる。
【0062】
このように、高負荷運転が連続すると予測される場合には、接触式給電方式に切り換えて運転することで、バッテリ不足により運転に支障がでるような事態を防ぐことができる。
【0063】
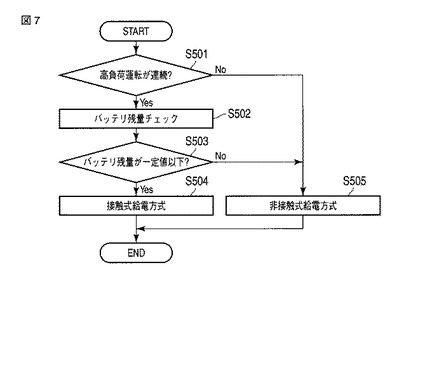
なお、図6では、高負荷運転が連続すると予測された場合に直ぐに接触給電方式に切り換えるようにしたが、そのときのバッテリ19の残量に応じて接触給電方式に切り換えるようにしても良い。
【0064】
このときの運転動作を図7に示す。
すなわち、高負荷運転が連続すると予測された場合において(ステップS501のYes)、制御部33は、バッテリ残量検出部32を通じてバッテリ19の残量をチェックする(ステップS502)。その結果、バッテリ19の残量が一定値(例えば半分)以下の状態であれば(ステップS503のYes)、制御部33は、接触式給電方式に切り換えてエレベータを運転する(ステップS402)。
【0065】
一方、高負荷運転が連続しないと予測された場合(ステップS501のNo)、あるいは、バッテリ19の残量が一定値より多い状態であれば(ステップS503のNo)、制御部33は、非接触給電方式のままでエレベータを運転する(ステップS402)。
【0066】
このように第2の実施形態によれば、高負荷運転が連続すると予測された場合に接触給電方式に切り換えることで、バッテリ不足を回避してエレベータの運転を継続することができる。
【0067】
また、高負荷運転時であっても、バッテリに余裕がある場合には接触式給電方式に切り換えずに非接触給電方式で運転を維持することで、接触給電による運転効率の低下を防ぐことができる。
【0068】
(第3の実施形態)
次に、第3の実施形態を説明する。
【0069】
第3の実施形態では、目的階到達時のバッテリ残量を予測し、バッテリ残量が一定値以下と予測される場合に接触式給電により急速充電を行うようにしたものである。
【0070】
エレベータの構成は図1と同様である。ここでは、図8を参照してエレベータの運転動作について説明する。
【0071】
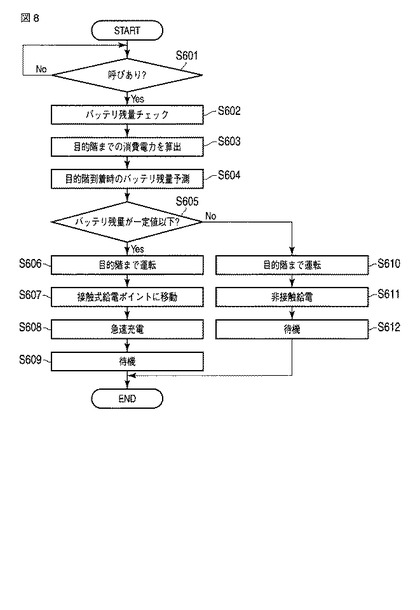
図8は第3の実施形態におけるエレベータの運転動作を示すフローチャートである。
【0072】
乗場呼びあるいはかご呼びが発生すると(ステップS601のYes)、制御部33は、まず、バッテリ残量検出部32を通じてバッテリ19の現在時点の残量をチェックすると共に(ステップS602)、目的階までの消費電力を算出することにより(ステップS603)、これらの情報から目的階到達時のバッテリ残量を予測する(ステップS604)。
【0073】
その結果、目的階到達時のバッテリ残量が一定値(例えば半分)になると予測された場合には(ステップS605のYes)、制御部33は、モータ17の駆動により乗りかご11を目的階まで運転した後(ステップS606)、非接触給電を行わずに、そのまま乗りかご11を運転方向に進めて、カウンタウエイト12を接触式給電可能な位置まで移動させる(ステップS607)。
【0074】
すなわち、例えば乗りかご11を上昇方向に運転中であれば、目的階到着後にそのまま乗りかご11を上昇方向に進めて、カウンタウエイト12の下端部に設けられた受電装置26aを接触式給電装置25aに接触させる。また、乗りかご11を下降方向に運転中であれば、目的階到着後にそのまま乗りかご11を下降方向に進めて、カウンタウエイト12の上端部に設けられた受電装置26bを接触式給電装置25bに接触させる。
【0075】
カウンタウエイト12を接触式給電可能な位置まで移動させると、制御部33は、接触式給電でバッテリ19を急速充電し(ステップS608)、カウンタウエイト12を所定の位置で待機させる(ステップS609)。この場合、図5で説明したように、バッテリ19の残量に応じて接触式給電可能な位置あるいは非接触給電可能な位置に待機させるようにする。
【0076】
一方、目的階到達時のバッテリ残量が一定値より多いと予測された場合には(ステップS605のNo)、制御部33は、モータ17の駆動により乗りかご11を目的階まで運転した後(ステップS606)、そのときのカウンタウエイト12の位置で非接触給電を行い(ステップS611)、その位置で待機させておく(ステップS612)。
【0077】
このように第3の実施形態によれば、目的階到達時のバッテリ残量を予測し、バッテリ残量が一定値以下と予測される場合に接触式給電により急速充電を行うことで、常にバッテリ残量を確保した状態で運転を継続することができる。
【0078】
以上述べた少なくとも1つの実施形態によれば、非接触給電装置からの給電が不足した状態であっても、バッテリを充電して運転を継続することのできるエレベータを提供することができる。
【0079】
なお、本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0080】
10…昇降路、11…乗りかご、12…カウンタウエイト、13…ロープ、14…シーブ、15…シーブ、16…トラクションシーブ、17…モータ、18…制御装置、19…バッテリ、20…給電システム、21…三相交流電源、22−1,22−2〜22−n…電源装置、23−1,23−2〜23−n…非接触給電装置、24…受電装置、25a,25b…接触式給電装置、26a,26b…受電装置、31…給電効率監視部、32…バッテリ残量検出部、33…制御部、33a…運転制御部、33b…高負荷運転予測部、33c…消費電力算出部、33d…バッテリ残量予測部、34…記憶部。
【技術分野】
【0001】
本発明の実施形態は、カウンタウエイトに受電装置を備え、昇降路内に設置された非接触給電装置から電力を非接触で受けるエレベータに関する。
【背景技術】
【0002】
近年、非接触給電方式を適用したエレベータが普及している。特に、カウンタウエイトに受電装置を備え、昇降路内に設置された非接触給電装置から電力を非接触で受けて動作するエレベータがある。
【0003】
この種のエレベータでは、カウンタウエイトにバッテリとモータを備えており、通常時はバッテリに蓄えられた電力でモータを駆動して運転動作する。そして、給電時は昇降路内に設置された給電装置とカウンタウエイトに設置された受電装置とを対向させ、非接触給電装置から非接触で電力を受け、これをバッテリに蓄えるようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−163533号公報
【特許文献2】特開2002−249285号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したような非接触給電方式のエレベータにあっては、非接触給電装置に何らかの異常が生じると、給電不足でバッテリ残量が足りなくなり、運転を継続できなくなる問題がある。
【0006】
また、非接触給電装置では一度に大量の電力を供給できない。このため、出勤時間帯などで高負荷運転などが連続すると、バッテリ残量が足りなくなり、運転を継続できなくなる可能性もある。
【0007】
本発明が解決しようとする課題は、非接触給電装置からの給電が不足した状態であっても、バッテリ残量を確保して運転を継続することのできるエレベータを提供することである。
【課題を解決するための手段】
【0008】
実施形態に係るエレベータは、昇降路内を乗りかごと共に昇降動作するカウンタウエイトに非接触で電力を供給する非接触給電装置を備えたエレベータにおいて、上記カウンタウエイトに接触して給電を行う接触式給電装置と、上記非接触給電装置の給電効率を監視する給電効率監視手段と、この給電効率監視手段によって上記非接触給電装置の給電効率が一定値以下に低下した状態が検出された場合に、上記接触式給電装置による給電に切り換えて運転を行う運転制御手段とを具備する。
【図面の簡単な説明】
【0009】
【図1】図1は第1の実施形態に係るエレベータの構成を示す図である。
【図2】図2は同実施形態におけるエレベータの制御装置の機能構成を示すブロック図である。
【図3】図3は同実施形態におけるエレベータの運転動作を示すフローチャートである。
【図4】図4は同実施形態におけるエレベータの接触式給電方式の動作を示すフローチャートである。
【図5】図5は同実施形態におけるエレベータの待機時の処理動作を示すフローチャートである。
【図6】図6は第2の実施形態におけるエレベータの運転動作を示すフローチャートである。
【図7】図7は同実施形態におけるエレベータの別の運転動作を示すフローチャートである。
【図8】図8は第3の実施形態におけるエレベータの運転動作を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照して実施形態を説明する。
【0011】
(第1の実施形態)
図1は第1の実施形態に係るエレベータの構成を示す図であり、2:1ローピンク形式のエレベータの構成が示されている。
【0012】
昇降路10の中に乗りかご11とカウンタウエイト(吊り合い錘)12が設けられており、それぞれに図示せぬガイドレールに昇降動作可能に支持されている。乗りかご11は、かご下にシーブ14を有しており、そのシーブ14の下側に一端が昇降路頂上部に固定されたロープ13が架設されている。
【0013】
このロープ13は、昇降路頂上部に設けられたシーブ15を介してカウンタウエイト12に設けられたトラクションシーブ16に巻回され、その他端部を昇降路頂上部に固定している。これにより、乗りかご11とカウンタウエイト12を2:1ローピンク形式で支持している。
【0014】
また、カウンタウエイト12には、モータ17、制御装置18、バッテリ19が搭載されている。モータ17は、乗りかご11とカウンタウエイト12を昇降動作させるための駆動装置である。このモータ17の回転軸に取り付けられたトラクションシーブ16が回転することで、トラクションシーブ16に巻回されたロープ13を介して乗りかご11とカウンタウエイト12がつるべ式に昇降動作する。
【0015】
制御装置18は、モータ17の駆動制御を含むエレベータ全体の制御を行う。なお、この制御装置18の機能構成については、後に図2を参照して説明する。バッテリ19は、エレベータの駆動に必要な電力を蓄える。
【0016】
また、本実施形態において、昇降路10にはカウンタウエイト12に非接触で所要の電力を供給するための給電システム20が設けられている。
【0017】
この給電システム20は、三相交流電源21に接続された複数の電源装置22−1,22−2,…22−nと、これらの電源装置22−1,22−2,…22−nに接続された非接触給電装置23−1,23−2,…23−nとからなる。
【0018】
電源装置22−1,22−2,…22−nは、建物の各階に対応して設けられており、それぞれに三相交流電源21から供給される電力をエレベータの駆動に必要な電力に変換する。
【0019】
非接触給電装置23−1,23−2,…23−nは、乗りかご11が各階で停止しているときのカウンタウエイト12の位置に合わせて昇降路10内に配設されている。これらの非接触給電装置23−1,23−2,…23−nは、カウンタウエイト12に設けられた受電装置24と対向したときに非接触で給電を行う。
【0020】
なお、非接触給電の方式としては、例えば電磁誘導方式が用いられる。「電磁誘導方式」は、2つの隣接するコイルの一方(給電側コイル)に電流を流したときに発生する磁束を媒介として他方のコイル(受電側コイル)に送電する方式である。この他に、電流を電磁波に変換し、アンテナを介して送電する「電波方式」や、電磁界の共鳴現象を利用した「電磁界共鳴方式」などがあるが、本発明ではこれらの方式に特に限定されるものではない。
【0021】
また、図1の例では、各階に非接触給電装置23−1,23−2,…23−nが設置されているが、その個数は任意であり、例えば最上階と最下階にだけ設置しておくことでも良い。
【0022】
このような構成において、カウンタウエイト12に搭載されたバッテリ19から電力を得ることで、モータ17を駆動して乗りかご11とカウンタウエイト12を運転動作させる。また、乗りかご11が各階で停止したときに、非接触給電装置23−1,23−2,…23−nの中でカウンタウエイト12に設けられた受電装置24と対向した非接触給電装置を通じて電力を受け、その電力をバッテリ19に蓄える。
【0023】
ここで、非接触給電装置23−1,23−2,…23−nは、カウンタウエイト12側の受電装置24と精度良く向かい合っていないと給電できない。また、何らかの異常が発生して、著しく給電効率が低下すると、バッテリ不足となり、エレベータを正常に運転できなくなる。
【0024】
このような事態に備え、本実施形態における給電システム20には、上述した非接触給電装置23−1,23−2,…23−nとは別に接触式給電装置25a,25bが設けられている。
【0025】
接触式給電装置25a,25bは、通常の運転時にカウンタウエイト12が接触しない位置に設けられている。具体的には、接触式給電装置25aは、昇降路10内の底部付近で、通常の運転時にカウンタウエイト12が最下階で停止する位置よりも下の位置に設置されており、カウンタウエイト12の下端部に設けられた受電装置26aと接触することで、電源装置22−1から供給される電力をカウンタウエイト12に与える。
【0026】
接触式給電装置25bは、昇降路10内の頂部付近で、通常の運転時にカウンタウエイト12が最上階で停止する位置よりも上の位置に設置されており、カウンタウエイト12の上端部に設けられた受電装置26bと接触することで、電源装置22−nから供給される電力をカウンタウエイト12に与える。
【0027】
接触式給電装置25a,25bから受電装置26a,26bを通じて給電された電力は、カウンタウエイト12に搭載されたバッテリ19に蓄えられる。
【0028】
図2はエレベータの制御装置18の機能構成を示すブロック図である。
【0029】
制御装置18は、CPU、ROM、RAMなどを備えたコンピュータによって構成される。この制御装置18には、給電効率監視部31と、バッテリ残量検出部32と、制御部33と、記憶部34とが設けられている。
【0030】
給電効率監視部31は、非接触給電装置23−1,23−2,…23−nの給電効率を監視している。バッテリ残量検出部32は、カウンタウエイト12に搭載されたバッテリ19の残量を検出する。
【0031】
制御部33は、エレベータ全体の制御を行う部分であり、ここでは非接触給電に関わる機能構成として、運転制御部33a、高負荷運転予測部33b、消費電力算出部33c、バッテリ残量予測部33dを有する。
【0032】
運転制御部33aは、エレベータの運転動作を制御するものであり、非接触給電装置23−1,23−2,…23−nの給電効率が一定値以下に低下した状態が検出された場合に接触式給電装置25a,25bによる給電に切り換えて運転を行う。
【0033】
また、高負荷運転予測部33bは、運転時の消費電力が高い高負荷運転を予測する。消費電力算出部33cは、乗りかご11を目的階まで運転したときの消費電力を算出する。バッテリ残量予測部33dは、バッテリ19の残量と目的階までの消費電力とに基づいて、乗りかご11が目的階に到着した時点のバッテリ19の残量を予測する。
【0034】
記憶部34は、エレベータの運転動作に必要な情報(例えば、時刻、行先階、荷重など)を記憶する。
【0035】
次に、第1の実施形態の動作について説明する。
図3は第1の実施形態におけるエレベータの運転動作を示すフローチャートである。
【0036】
通常、制御装置18は、非接触給電方式でエレベータの運転を行う(ステップS101)。すなわち、乗りかご11が各階で停止したときに、非接触給電装置23−1,23−2,…23−nの中でカウンタウエイト12に設けられた受電装置24と対向した非接触給電装置を通じて電力を受け、その電力をバッテリ19に蓄えながら、モータ17を駆動して乗りかご11とカウンタウエイト12を運転動作させる(ステップS101)。
【0037】
このとき、制御装置18は、給電効率監視部31を通じて非接触給電装置23−1,23−2,…23−nの給電効率を監視している(ステップS102)。給電効率は、非接触給電装置23−1,23−2,…23−nから実際に得られた電力の量を計測することで求める。また、別の方法として、以下のようなセンサを用いて給電効率を求めても良い。
【0038】
(1)地震や強風などでカウンタウエイト12が揺れると、非接触給電装置23−1,23−2,…23−nと受電装置24との間隔が一時的に開いて、給電効率が低下する。そこで、非接触給電装置23−1,23−2,…23−nと受電装置24との間隔を光学的に検出するギャップセンサを用い、そのギャップセンサの検出信号の変化から給電効率を算出する。この場合、上記間隔が長くなるほど、給電効率が悪くなる。
【0039】
(2)非接触給電として電磁誘導方式を用いている場合、コイルに金属等の異物が混入していると、磁束が乱れて給電効率が低下する。そこで、非接触給電装置23−1,23−2,…23−nの磁束を検出する磁束検出センサを用い、その磁束検出センサの検出信号の変化から給電効率を算出する。この場合、上記磁束の量が少なくなるほど、給電効率が悪くなる。
【0040】
(3)カウンタウエイト12はロープ13によって吊り下げられているため、ロープ13の伸びによって非接触給電装置23−1,23−2,…23−nと受電装置24との位置合わせにずれが生じる。この位置ずれを光学的に検出する位置検出センサを用い、その位置検出センサの検出信号の変化から給電効率を算出する。この場合、上記位置ずれが大きいほど、給電効率が悪くなる。
【0041】
ここで、非接触給電装置23−1,23−2,…23−nの給電効率が一定値Qt以下に低下した場合(ステップS103のYes)、制御装置18は、運転に支障が出るものと判断し、接触式給電方式に切り換えて運転する(ステップS104)。なお、上記Qtの値は、例えば正常時の給電効率の約半分に設定されているものとする。
【0042】
図4はエレベータの接触式給電方式の動作を示すフローチャートである。
【0043】
接触式給電方式運転に切り換えられると、まず、制御部33は、呼びの有無を検出する(ステップS201)。ここで言う「呼び」とは、乗場呼びとかご呼びとの両方である。「乗場呼び」とは、各階の乗場に設置された乗場呼び釦の操作により登録される呼びの信号のことであり、登録階と行先方向の情報を含む。「かご呼び」とは、かご室内に設けられた図示せぬ行先呼び釦の操作により登録される呼びの信号のことであり、行き先階の情報を含む。
【0044】
ここで、呼びのない状態が一定時間(例えば10分)継続した場合に(ステップS202のYes)、制御部33は、エレベータの利用者がいないものと判断し、モータ17を駆動してカウンタウエイト12を接触式給電可能な位置に移動させる(ステップS203)。
【0045】
「接触式給電可能な位置」とは、図1の例では、接触式給電装置25a,25bの設置位置であり、具体的には最下階より下の位置と最上階より上の位置である。この場合、乗りかご11が待ち状態で停止しているときのカウンタウエイト12の位置が最下階に近ければ、カウンタウエイト12の下端部に設けられた受電装置26aを接触式給電装置25aに接触させるようにカウンタウエイト12を下降方向に移動させる。逆に、カウンタウエイト12の位置が最上階に近ければ、カウンタウエイト12の上端部に設けられた受電装置26bを接触式給電装置25bに接触させるようにカウンタウエイト12を上昇方向に移動させる。
【0046】
このようにして、受電装置26aと接触式給電装置25aとの接触、あるいは、受電装置26bと接触式給電装置25bとの接触により電力がカウンタウエイト12に供給されると、制御部33は、その電力をバッテリ19に蓄えた後(ステップS204)、カウンタウエイト12を待機させる(ステップS205)。このときの待機位置は、図5に示すように、バッテリ19の残量に応じて設定される。
【0047】
図5はエレベータの待機時の処理動作を示すフローチャートである。
【0048】
カウンタウエイト12を待機させる場合において、制御部33は、バッテリ残量検出部32を通じてバッテリ19の残量をチェックする(ステップS301)。その結果、バッテリ19の残量が一定値(例えば半分)以下の状態であれば(ステップS302のYes)、制御部33は、カウンタウエイト12を接触式給電可能な位置で待機させる(ステップS303)。
【0049】
上述したように、「接触式給電可能な位置」とは、接触式給電装置25a,25bの設置位置であり、どちらか近い位置にカウンタウエイト12を待機させるようにモータ17を駆動制御する。
【0050】
一方、バッテリ19の残量が一定値より多い状態であれば(ステップS302のNo)、制御部33は、カウンタウエイト12を非接触式給電可能な位置で待機させる(ステップS304)。
【0051】
「非接触式給電可能な位置」とは、非接触給電装置23−1,23−2,…23−nの設置位置であり、これらの中で近い位置にカウンタウエイト12を待機させるようにモータ17を駆動制御する。
【0052】
このように第1の実施形態によれば、非接触給電方式での運転中に何らかの異常が発生して給電効率が著しく低下した場合でも、接触式給電方式に切り換えることで、バッテリ残量を確保してエレベータの運転を継続することができる。
【0053】
また、呼びのない状態でカウンタウエイト12を待機させる場合に、バッテリ残量が少ない場合には接触式給電可能な位置を待機位置として設定することで、バッテリ19を急速充電して次の運転に備えることができる。一方、バッテリ残量が十分である場合には通常の運転時と同様に非接触式給電可能な位置を待機位置として設定することで、呼びがあったときにすぐに応答することができる。
【0054】
(第2の実施形態)
次に、第2の実施形態について説明する。
【0055】
第2の実施形態では、高負荷運転が連続すると予測される場合に接触式給電方式に切り換えて運転するものである。
【0056】
エレベータの構成は図1と同様である。ここでは、図6および図7を参照してエレベータの運転動作について説明する。
【0057】
図6は第2の実施形態におけるエレベータの運転動作を示すフローチャートである。
【0058】
エレベータを運転する際に、制御部33は、高負荷運転が連続するか否かを判断する(ステップS401)。これは、時刻や行先階、荷重などの情報から消費電力が予めバッテリ容量から定めた基準値よりも高くなる時間帯や運転パターンを学習しておき、その学習した時間帯や運転パターンの条件と一致する場合に高負荷運転が連続するものと予測するものである。
【0059】
上記時間帯としては、出勤時、昼休み時、退勤時などがある。また、上記運転パターンとしては、行先階までの距離が長く(ロングラン)、定格荷重に近い状態で力行運転するようなパターンである。
【0060】
高負荷運転が連続すると予測された場合(ステップS401のYes)、制御部33は、接触式給電方式に切り換えてエレベータを運転する(ステップS402)。すなわち、図4で説明したように、呼びのないときにカウンタウエイト12を接触式給電可能な位置に移動させ、接触式給電装置25a,25bから電力を受け、その電力をバッテリ19に蓄えながら、モータ17を駆動して乗りかご11とカウンタウエイト12を運転動作させる。
【0061】
一方、高負荷運転が連続しないと予測された場合(ステップS401のNo)、制御部33は、非接触給電方式のままでエレベータを運転する(ステップS402)。すなわち、乗りかご11が各階で停止したときに、非接触給電装置23−1,23−2,…23−nの中でカウンタウエイト12に設けられた受電装置24と対向した非接触給電装置を通じて電力を受け、その電力をバッテリ19に蓄えながら、モータ17を駆動して乗りかご11とカウンタウエイト12を運転動作させる。
【0062】
このように、高負荷運転が連続すると予測される場合には、接触式給電方式に切り換えて運転することで、バッテリ不足により運転に支障がでるような事態を防ぐことができる。
【0063】
なお、図6では、高負荷運転が連続すると予測された場合に直ぐに接触給電方式に切り換えるようにしたが、そのときのバッテリ19の残量に応じて接触給電方式に切り換えるようにしても良い。
【0064】
このときの運転動作を図7に示す。
すなわち、高負荷運転が連続すると予測された場合において(ステップS501のYes)、制御部33は、バッテリ残量検出部32を通じてバッテリ19の残量をチェックする(ステップS502)。その結果、バッテリ19の残量が一定値(例えば半分)以下の状態であれば(ステップS503のYes)、制御部33は、接触式給電方式に切り換えてエレベータを運転する(ステップS402)。
【0065】
一方、高負荷運転が連続しないと予測された場合(ステップS501のNo)、あるいは、バッテリ19の残量が一定値より多い状態であれば(ステップS503のNo)、制御部33は、非接触給電方式のままでエレベータを運転する(ステップS402)。
【0066】
このように第2の実施形態によれば、高負荷運転が連続すると予測された場合に接触給電方式に切り換えることで、バッテリ不足を回避してエレベータの運転を継続することができる。
【0067】
また、高負荷運転時であっても、バッテリに余裕がある場合には接触式給電方式に切り換えずに非接触給電方式で運転を維持することで、接触給電による運転効率の低下を防ぐことができる。
【0068】
(第3の実施形態)
次に、第3の実施形態を説明する。
【0069】
第3の実施形態では、目的階到達時のバッテリ残量を予測し、バッテリ残量が一定値以下と予測される場合に接触式給電により急速充電を行うようにしたものである。
【0070】
エレベータの構成は図1と同様である。ここでは、図8を参照してエレベータの運転動作について説明する。
【0071】
図8は第3の実施形態におけるエレベータの運転動作を示すフローチャートである。
【0072】
乗場呼びあるいはかご呼びが発生すると(ステップS601のYes)、制御部33は、まず、バッテリ残量検出部32を通じてバッテリ19の現在時点の残量をチェックすると共に(ステップS602)、目的階までの消費電力を算出することにより(ステップS603)、これらの情報から目的階到達時のバッテリ残量を予測する(ステップS604)。
【0073】
その結果、目的階到達時のバッテリ残量が一定値(例えば半分)になると予測された場合には(ステップS605のYes)、制御部33は、モータ17の駆動により乗りかご11を目的階まで運転した後(ステップS606)、非接触給電を行わずに、そのまま乗りかご11を運転方向に進めて、カウンタウエイト12を接触式給電可能な位置まで移動させる(ステップS607)。
【0074】
すなわち、例えば乗りかご11を上昇方向に運転中であれば、目的階到着後にそのまま乗りかご11を上昇方向に進めて、カウンタウエイト12の下端部に設けられた受電装置26aを接触式給電装置25aに接触させる。また、乗りかご11を下降方向に運転中であれば、目的階到着後にそのまま乗りかご11を下降方向に進めて、カウンタウエイト12の上端部に設けられた受電装置26bを接触式給電装置25bに接触させる。
【0075】
カウンタウエイト12を接触式給電可能な位置まで移動させると、制御部33は、接触式給電でバッテリ19を急速充電し(ステップS608)、カウンタウエイト12を所定の位置で待機させる(ステップS609)。この場合、図5で説明したように、バッテリ19の残量に応じて接触式給電可能な位置あるいは非接触給電可能な位置に待機させるようにする。
【0076】
一方、目的階到達時のバッテリ残量が一定値より多いと予測された場合には(ステップS605のNo)、制御部33は、モータ17の駆動により乗りかご11を目的階まで運転した後(ステップS606)、そのときのカウンタウエイト12の位置で非接触給電を行い(ステップS611)、その位置で待機させておく(ステップS612)。
【0077】
このように第3の実施形態によれば、目的階到達時のバッテリ残量を予測し、バッテリ残量が一定値以下と予測される場合に接触式給電により急速充電を行うことで、常にバッテリ残量を確保した状態で運転を継続することができる。
【0078】
以上述べた少なくとも1つの実施形態によれば、非接触給電装置からの給電が不足した状態であっても、バッテリを充電して運転を継続することのできるエレベータを提供することができる。
【0079】
なお、本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0080】
10…昇降路、11…乗りかご、12…カウンタウエイト、13…ロープ、14…シーブ、15…シーブ、16…トラクションシーブ、17…モータ、18…制御装置、19…バッテリ、20…給電システム、21…三相交流電源、22−1,22−2〜22−n…電源装置、23−1,23−2〜23−n…非接触給電装置、24…受電装置、25a,25b…接触式給電装置、26a,26b…受電装置、31…給電効率監視部、32…バッテリ残量検出部、33…制御部、33a…運転制御部、33b…高負荷運転予測部、33c…消費電力算出部、33d…バッテリ残量予測部、34…記憶部。
【特許請求の範囲】
【請求項1】
昇降路内を乗りかごと共に昇降動作するカウンタウエイトに非接触で電力を供給する非接触給電装置を備えたエレベータにおいて、
上記カウンタウエイトに接触して給電を行う接触式給電装置と、
上記非接触給電装置の給電効率を監視する給電効率監視手段と、
この給電効率監視手段によって上記非接触給電装置の給電効率が一定値以下に低下した状態が検出された場合に、上記接触式給電装置による給電に切り換えて運転を行う運転制御手段と
を具備したことを特徴とするエレベータ。
【請求項2】
上記運転制御手段は、
呼びのない状態が一定時間継続したときに、上記カウンタウエイトを上記接触式給電装置にて給電可能な位置まで移動させることを特徴とする請求項1記載のエレベータ。
【請求項3】
上記カウンタウエイトに設けられたバッテリの残量を検出するバッテリ残量検出手段を備え、
上記運転制御手段は、
上記バッテリ残量検出手段によって検出された上記バッテリの残量が一定値以下であれば上記カウンタウエイトを上記接触式給電装置にて給電可能な位置で待機させ、上記バッテリの残量が一定値より多ければ、上記カウンタウエイトを上記非接触給電装置にて給電可能な位置で待機させることを特徴とする請求項1記載のエレベータ。
【請求項4】
高負荷運転を予測する高負荷運転予測手段を備え、
上記運転制御手段は、
上記高負荷運転予測手段によって高負荷運転が連続するものと予測された場合に、上記接触式給電装置による給電に切り換えて運転を行うことを特徴とする請求項1記載のエレベータ。
【請求項5】
上記カウンタウエイトに設けられたバッテリの残量を検出するバッテリ残量検出手段と、
高負荷運転を予測する高負荷運転予測手段とを備え、
上記運転制御手段は、
上記高負荷運転予測手段によって高負荷運転が連続するものと予測された場合に、上記バッテリ残量検出手段によって検出された上記バッテリの残量が一定値以下であれば、上記接触式給電装置による給電に切り換えて運転を行うことを特徴とする請求項1記載のエレベータ。
【請求項6】
上記カウンタウエイトに設けられたバッテリの残量を検出するバッテリ残量検出手段と、
目的階までの消費電力を算出する消費電力算出手段と、
上記バッテリ残量検出手段によって検出された上記バッテリの残量と上記消費電力算出手段によって算出された上記目的階までの消費電力とに基づいて、上記乗りかごが上記目的階に到着した時点の上記バッテリの残量を予測するバッテリ残量予測手段とを備え、
上記運転制御手段は、
上記バッテリ残量予測手段によって予測された上記バッテリの残量が一定値以下であれば、上記乗りかごを上記目的階まで運転した後、上記カウンタウエイトを上記接触給式電装置にて給電可能な位置まで移動させて、上記バッテリを充電することを特徴とする請求項1記載のエレベータ。
【請求項7】
上記非接触給電装置は、
上記乗りかごが各階で停止しているときの上記カウンタウエイトの位置に合わせて設けられており、
上記接触給式電装置は、
通常の運転時に上記カウンタウエイトが接触しない位置に設けられていることを特徴とする請求項1記載のエレベータ。
【請求項8】
上記接触式給電装置は、
通常の運転時に上記カウンタウエイトが最下階で停止する位置よりもさらに下の第1の位置と、上記カウンタウエイトが最上階で停止する位置よりもさらに上の第2の位置に設置されており、給電時に上記第1および第2の位置のうちの近い方に上記カウンタウエイトを移動させて給電を行うことを特徴とする請求項7記載のエレベータ。
【請求項1】
昇降路内を乗りかごと共に昇降動作するカウンタウエイトに非接触で電力を供給する非接触給電装置を備えたエレベータにおいて、
上記カウンタウエイトに接触して給電を行う接触式給電装置と、
上記非接触給電装置の給電効率を監視する給電効率監視手段と、
この給電効率監視手段によって上記非接触給電装置の給電効率が一定値以下に低下した状態が検出された場合に、上記接触式給電装置による給電に切り換えて運転を行う運転制御手段と
を具備したことを特徴とするエレベータ。
【請求項2】
上記運転制御手段は、
呼びのない状態が一定時間継続したときに、上記カウンタウエイトを上記接触式給電装置にて給電可能な位置まで移動させることを特徴とする請求項1記載のエレベータ。
【請求項3】
上記カウンタウエイトに設けられたバッテリの残量を検出するバッテリ残量検出手段を備え、
上記運転制御手段は、
上記バッテリ残量検出手段によって検出された上記バッテリの残量が一定値以下であれば上記カウンタウエイトを上記接触式給電装置にて給電可能な位置で待機させ、上記バッテリの残量が一定値より多ければ、上記カウンタウエイトを上記非接触給電装置にて給電可能な位置で待機させることを特徴とする請求項1記載のエレベータ。
【請求項4】
高負荷運転を予測する高負荷運転予測手段を備え、
上記運転制御手段は、
上記高負荷運転予測手段によって高負荷運転が連続するものと予測された場合に、上記接触式給電装置による給電に切り換えて運転を行うことを特徴とする請求項1記載のエレベータ。
【請求項5】
上記カウンタウエイトに設けられたバッテリの残量を検出するバッテリ残量検出手段と、
高負荷運転を予測する高負荷運転予測手段とを備え、
上記運転制御手段は、
上記高負荷運転予測手段によって高負荷運転が連続するものと予測された場合に、上記バッテリ残量検出手段によって検出された上記バッテリの残量が一定値以下であれば、上記接触式給電装置による給電に切り換えて運転を行うことを特徴とする請求項1記載のエレベータ。
【請求項6】
上記カウンタウエイトに設けられたバッテリの残量を検出するバッテリ残量検出手段と、
目的階までの消費電力を算出する消費電力算出手段と、
上記バッテリ残量検出手段によって検出された上記バッテリの残量と上記消費電力算出手段によって算出された上記目的階までの消費電力とに基づいて、上記乗りかごが上記目的階に到着した時点の上記バッテリの残量を予測するバッテリ残量予測手段とを備え、
上記運転制御手段は、
上記バッテリ残量予測手段によって予測された上記バッテリの残量が一定値以下であれば、上記乗りかごを上記目的階まで運転した後、上記カウンタウエイトを上記接触給式電装置にて給電可能な位置まで移動させて、上記バッテリを充電することを特徴とする請求項1記載のエレベータ。
【請求項7】
上記非接触給電装置は、
上記乗りかごが各階で停止しているときの上記カウンタウエイトの位置に合わせて設けられており、
上記接触給式電装置は、
通常の運転時に上記カウンタウエイトが接触しない位置に設けられていることを特徴とする請求項1記載のエレベータ。
【請求項8】
上記接触式給電装置は、
通常の運転時に上記カウンタウエイトが最下階で停止する位置よりもさらに下の第1の位置と、上記カウンタウエイトが最上階で停止する位置よりもさらに上の第2の位置に設置されており、給電時に上記第1および第2の位置のうちの近い方に上記カウンタウエイトを移動させて給電を行うことを特徴とする請求項7記載のエレベータ。
【図1】



【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−14424(P2013−14424A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−150125(P2011−150125)
【出願日】平成23年7月6日(2011.7.6)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月6日(2011.7.6)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【Fターム(参考)】
[ Back to top ]