
ダンプトラックの積載量表示装置

【課題】周辺監視用のモニタ画面を用いて、運転者に直感的に積荷状態を認識させることが可能なダンプトラックの積載量表示装置を提供する。
【解決手段】周辺監視装置10は、ダンプトラック1の画像を含む俯瞰画像200を表示するモニタ50と、ダンプトラック1の積載量を検知するペイロードメータECU21と、ペイロードメータECU21における検知結果に基づいてダンプトラック1のベッセル4上に画像表示される積荷画像C1の大きさを切り換えてモニタ50に表示させるコントローラ20と、を備えている。
【解決手段】周辺監視装置10は、ダンプトラック1の画像を含む俯瞰画像200を表示するモニタ50と、ダンプトラック1の積載量を検知するペイロードメータECU21と、ペイロードメータECU21における検知結果に基づいてダンプトラック1のベッセル4上に画像表示される積荷画像C1の大きさを切り換えてモニタ50に表示させるコントローラ20と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ダンプトラックの積載量表示装置に関する。
【背景技術】
【0002】
鉱山作業などに用いられるダンプトラックは、一般的なトラックやバスに比べて格段に大きな車幅(例えば、約5m程度)を有している。そして、運転者が居るキャブは、車体前方のデッキ部上における左寄りの位置に設けられているため、運転者からは左前方の一部しか目視確認することができない。
【0003】
このため、ダンプトラックには、車体の周辺監視を行うために、キャブが配置されたデッキ部等に複数のカメラが設置されており、これらのカメラによって取得された画像を用いて生成された俯瞰画像をキャブ内に設置されたモニタ画面に表示して周辺監視が行われている。
【0004】
また、ダンプトラックのキャブ内に居る運転者は、キャブの後方にベッセル(荷台)が設けられているため、ベッセル上に土や鉱石等の積荷が積載されているか否かを、ミラー等を用いて目視確認することができない。
【0005】
例えば、特許文献1には、積荷を積載するボディ(荷台)を複数のサスペンションシリンダによって支持する運搬車両において、サスペンションシリンダの圧力を検出してダンプトラックの空荷荷重を確実に計測可能な車両の積荷重量計測装置について開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−112796号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記従来の積荷重量計測装置では、以下に示すような問題点を有している。
すなわち、上記公報に開示された積荷重量計測装置では、空荷荷重を確実に計測することができるものの、モニタに数値として表示されるだけであるため、キャブ内の運転者が積荷の状態を直感的に認識することが困難である。
【0008】
一方で、運転者が居るキャブ内には、上述した周辺監視用のモニタが設けられており、常時、ダンプトラックの合成画像とともに車両周辺の様子がモニタリングされている。
本発明の課題は、周辺監視用のモニタ画面を用いて、運転者に直感的に積荷状態を認識させることが可能なダンプトラックの積載量表示装置を提供することにある。
【課題を解決するための手段】
【0009】
第1の発明に係るダンプトラックの積載量表示装置は、複数のカメラが搭載されており、前記複数のカメラによって得られる画像を組み合わせた俯瞰画像を用いて周辺監視を行うダンプトラックの積載量表示装置であって、表示部と、検知部と、表示制御部と、を備えている。表示部は、ダンプトラックの画像を含む俯瞰画像を表示する。検知部は、ダンプトラックの積載量を検知する。表示制御部は、検知部における検知結果に基づいて、ダンプトラックの荷台上に画像表示される積荷イメージの大きさを切り換えて表示部に表示させる。
【0010】
ここでは、ダンプトラックの周辺監視用に用いられている俯瞰画像上において、ダンプトラックの荷台に載せられた積載量の検知結果に応じて、ダンプトラックの荷台上に画像表示される積荷のイメージの大きさを切り換えて表示する。
【0011】
ここで、上記積荷のイメージの大きさの切り換えには、積荷のイメージを表示する/表示しない、という表示切り換えも含まれる。また、検知部による積載量の検知としては、積荷の重量の検知、積荷の有無の検知等が含まれる。
【0012】
これにより、ダンプトラックの運転者は、例えば、荷台上に積荷がない状態であるかどうかを、キャブ内に設けられた周辺監視用のモニタを確認するだけで直感的に認識することができる。よって、運転者が空荷状態であると勘違いしてしまうことを防止することができる。
【0013】
第2の発明に係るダンプトラックの積載量表示装置は、第1の発明に係るダンプトラックの積載量表示装置であって、表示制御部は、検知部における検知結果に応じて、積荷イメージの大きさを段階的に切り換える。
【0014】
ここでは、周辺監視用のモニタに表示される俯瞰画像上に合成されるダンプトラックの積荷の大きさを、積載量の大きさに基づいて段階的に切り換えながら表示する。
これにより、運転者は、モニタ画面を見ながら、荷台上にどの程度の積載量であるかを容易に認識することができる。
【0015】
第3の発明に係るダンプトラックの積載量表示装置は、第1または第2の発明に係るダンプトラックの積載量表示装置であって、表示制御部は、ダンプトラックに荷台上に画像表示される積荷のイメージを、ダンプトラックの画像とは異なる色に着色して表示させる。
ここでは、俯瞰画像上に表示されたダンプトラックの荷台上に表示される積荷のイメージの画像を、ダンプトラックの画像とは異なる色、例えば、警告色(黄、橙、赤等)に着色して表示させる。
【0016】
これにより、運転者は、積荷のイメージの画像部分の有無を見易くなり、一見して直感的に判別することができる。
なお、積荷のイメージ部分に加えて、ダンプトラックの車体部分を着色して表示することで、積荷のイメージ部分との着色のコントラストをつけて、運転者が車両の積載状態をより分かり易くすることができる。
【0017】
第4の発明に係るダンプトラックの積載量表示装置は、第1から第3の発明のいずれか1つに係るダンプトラックの積載量表示装置であって、検知部は、荷台に積載された積荷の重量を測定するペイロードメータである。
【0018】
ここでは、積載量を検知する検知部として、ペイロードメータを用いている。
これにより、荷台上に載せられた積荷の重量を容易に検知することができる。
【0019】
第5の発明に係るダンプトラックの積載量表示装置は、第4の発明に係るダンプトラックの積載量表示装置であって、ペイロードメータは、荷台を下方から支持するサスペンションシリンダに取り付けられている。
【0020】
ここでは、上述したペイロードメータを、荷台を下方から支持するサスペンションシリンダに取り付けられている。
これにより、積荷の重量を直接的に受けるサスペンションシリンダにペイロードメータを設けることで、容易に積載量を検知することができる。
【発明の効果】
【0021】
本発明に係るダンプトラックの積載量表示装置によれば、周辺監視用のモニタを確認するだけで荷台上の積荷の状態を直感的に認識することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態に係るダンプトラック全体の構成を示す斜視図。
【図2】図1のダンプトラックの周辺監視装置の構成を示す制御ブロック図。
【図3】図1のダンプトラックに搭載されたカメラの配置を示す斜視図。
【図4】図1のダンプトラックに搭載されたサスペンションシリンダ等を示す模式図。
【図5】(a)は、図2のモニタ画面に表示される俯瞰画像上における積荷のない状態を示す図。(b)は、積荷がある状態を示す図。
【図6】図2の周辺監視装置による積載量表示制御の流れを示すフローチャート。
【図7】(a)〜(e)は、本発明の他の実施形態に係るダンプトラックの積載量表示装置による段階的な積載量の変化を示す図。
【発明を実施するための形態】
【0023】
本発明の一実施形態に係るダンプトラックの積載量表示装置について、図1〜図6を用いて説明すれば以下の通りである。
なお、以下の説明において、「前」「後」「左」「右」とは、運転席に着座して正面を向いている運転者から見た方向を基準とする方向を意味しており、「車幅方向」とは、「左右方向」と同義である。
【0024】
[ダンプトラック1全体の構成]
本実施形態に係るダンプトラック1は、鉱山作業などに用いられる自走式の超大型作業車両であって、約5mを超える車幅を有している。
【0025】
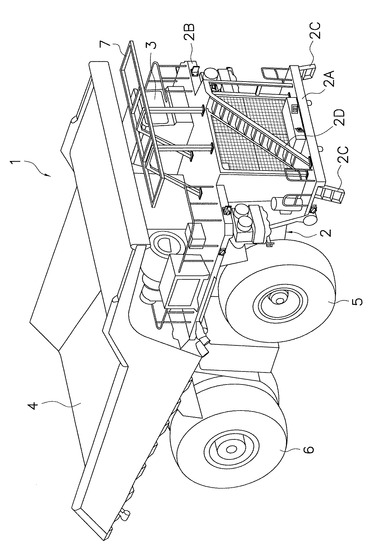
ダンプトラック1は、図1に示すように、主として、車体フレーム2と、キャブ3と、ベッセル(荷台)4と、左右一対の前輪5および後輪6と、図示しない給電用のパンタグラフを設置するベース7と、車両周囲を監視する周辺監視装置(積載量表示装置)10(図2参照)と、を備えている。なお、周辺監視装置10の構成および動作については、後段にて詳述する。
【0026】
車体フレーム2は、図示しないディーゼルエンジンやトランスミッション等の動力機構やその他の補機類を支持している。また、車体フレーム2の前部に左右一対の前輪5、後部に左右一対の後輪6がそれぞれ支持されている。車体フレーム2は、地面に近い側に設けられたロアデッキ部2Aと、ロアデッキ部2Aの上方に設けられたアッパデッキ部2Bと、を有している。
【0027】
ロアデッキ部2Aと地面との間には、乗降用の可動式ラダー2Cが2つ設けられている。また、ロアデッキ部2Aとアッパデッキ部2Bとの間には、ロアデッキ部2Aとアッパデッキ部2B間を行き来するための斜めラダー2Dが設けられている。さらに、アッパデッキ部2B上には、アッパデッキ部2Bの外周部分に沿って移動用の柵状の手すりが固定されている。
【0028】
キャブ3は、アッパデッキ部2B上における車幅方向の中央から左寄りの位置に配置され、4本の支柱によって構成されるROPS(Roll-Over-Protection Structure)構造を有している。運転者は、車体左側の路肩を容易に確認できる状態で走行するが、車体の周囲確認を行うためには頭を大きく動かす必要がある。また、アッパデッキ部2Bには、車両の周囲を確認するために、図示しないサイドミラーが複数設けられている。これらのサイドミラーは、キャブ3から離れた位置にあるため、運転者はサイドミラーを用いて周囲確認を行う際にも頭を大きく動かす必要がある。
【0029】
キャブ3内には、運転席、シフトレバー、コントローラ(表示制御部)20、モニタ(表示部)50、ハンドル、アクセルペダル、ブレーキペダル等が設けられている。なお、コントローラ20およびモニタ50は、後述する周辺監視装置10の一部を構成する。
【0030】
ベッセル4は、砕石等の重量物を積載するための荷台であって、後側底部において回動軸4aを介して車体フレーム2の後端部に回動可能に連結されている。これにより、ベッセル4は、油圧シリンダ31(図4参照)等のアクチュエータによって、前部が上方に回動して積載物を排出する起立姿勢と、前部がキャブ3の上部に位置する積載姿勢との範囲で回動させることができる。
【0031】
なお、ベッセル4に積載された積荷の重量を検知して、モニタ50に表示される俯瞰画面200(図5(a)等参照)上に積荷の有無を表示する制御については、後段にて詳述する。
【0032】
[周辺監視装置10の構成]
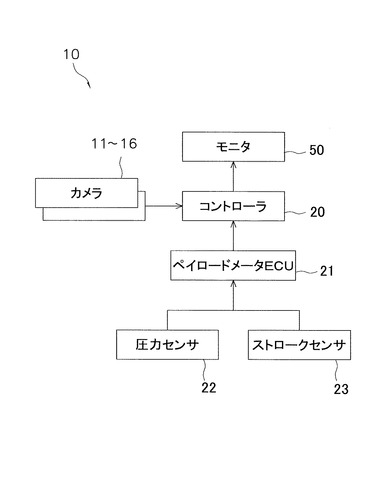
周辺監視装置10は、ダンプトラック1の周辺に存在する障害物の有無等を監視する装置であって、図2に示すように、6台のカメラ11〜16と、コントローラ20と、ペイロードメータECU(検知部)21と、圧力センサ22と、ストロークセンサ23と、モニタ50と、を有している。
【0033】
(カメラ11〜16)
6台のカメラ11〜16は、図3に示すように、ダンプトラック1の周囲360度範囲の画像を取得するためにダンプトラック1の外周部分にそれぞれ取り付けられている。なお、各カメラ11〜16は、左右方向において120度(左右60度ずつ)、高さ方向において96度の視野範囲を有している。
【0034】
前方カメラ11は、図3に示すように、斜めラダー2Dの最上段の踊り場部分の下部に、車体前方を向くように配置されている。そして、前方カメラ11の撮像範囲は、車両の前方である。
【0035】
右側方第1カメラ12は、図3に示すように、アッパデッキ部2Bの前側面右端部付近に、車体右斜め前方を向くように配置されている。そして、右側方第1カメラ12の撮像範囲は、車両の右斜め前方である。
【0036】
左側方第1カメラ13は、図3に示すように、第2カメラ12と左右対称位置、すなわちアッパデッキ部2Bの前側面左端部付近に、車体左斜め前方を向くように配置されている。そして、左側方第1カメラ13の撮像範囲は、車両の左斜め前方である。
【0037】
右側方第2カメラ14は、図3に示すように、アッパデッキ部2Bの右側面前端部付近に、車体右斜め後方を向くように配置されている。そして、右側方第2カメラ14の撮像範囲は、車両の右斜め後方である。
【0038】
左側方第2カメラ15は、図3に示すように、第4カメラと左右対称位置、すなわちアッパデッキ部2Bの左側面前端部付近に、車体左斜め後方を向くように配置されている。そして、左側方第2カメラ15の撮像範囲は、車両の左斜め後方である。
【0039】
後方カメラ16は、図3に示すように、車体フレーム2の後端付近に、車体後方を向くように配置されている。そして、後方カメラ16の撮像範囲は、車両後方である。
【0040】
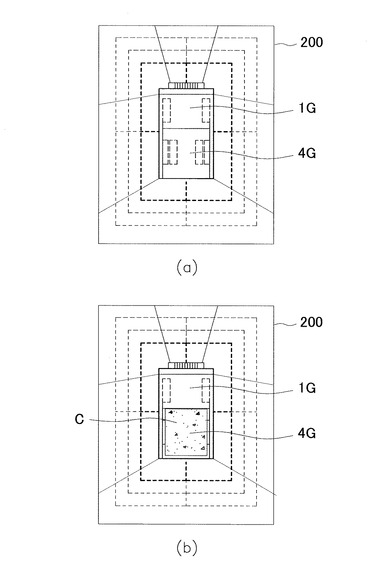
以上の6台のカメラ11〜16によれば、図5(a)に示すように、ダンプトラック1の周囲360度の全周囲を含む俯瞰画像200を取得することができる。また、6台のカメラ11〜16は、それぞれ撮像した画像に対応する画像データをコントローラ20に送信する。
【0041】
(コントローラ20)
コントローラ20は、図2に示すように、各カメラ11〜16、ペイロードメータECU21、モニタ50に接続されている。
また、コントローラ20は、各カメラ11〜16から撮像画像を受信し、各カメラ11〜16によって撮像されたそれぞれの撮像範囲の画像を無限遠に視点を変換した後で合成して、図5(a)に示すような俯瞰画像200を生成する。
【0042】
さらに、コントローラ20は、ペイロードメータECU21から現在積載している積荷の重量に関するデータを受信して、図5(b)に示すように、俯瞰画像200上に積荷画像Cを合成してモニタ50に表示させる。
【0043】
(ペイロードメータECU21)
ペイロードメータECU21は、図2に示すように、圧力センサ22およびストロークセンサ23に接続されており、圧力センサ22およびストロークセンサ23から受信したデータを用いて積載重量を計測する車載型荷重計(ペイロードメータ)として機能する。
【0044】
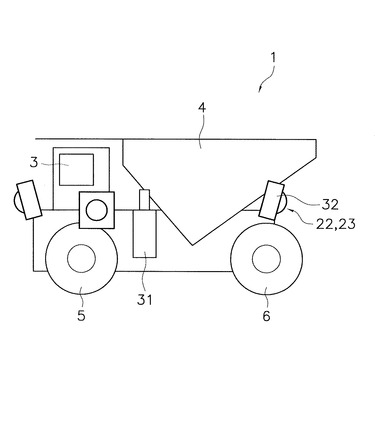
また、ペイロードメータECU21に接続された圧力センサ22およびストロークセンサ23は、図4に示すように、ベッセル4を下方から支持するサスペンションシリンダ32に設けられている。
【0045】
これにより、サスペンションシリンダ32にかかる圧力を圧力センサ22によって検出するとともに、サスペンションシリンダ32のストローク量をストロークセンサ23において検出することで、ペイロードメータECU21においてベッセル4上に積載された積荷の重量を算出することができる。
【0046】
なお、ペイロードメータECU21において算出された積荷の重量に基づく積載量表示制御については、後段にて詳述する。
【0047】
<積載量表示制御>
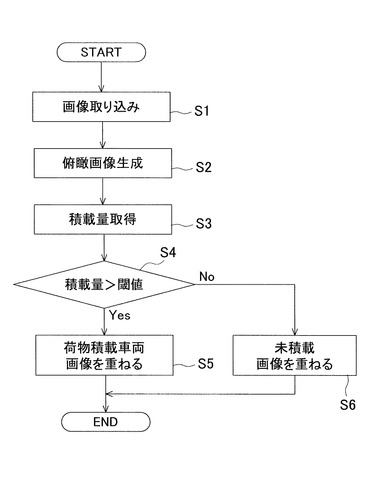
本実施形態のダンプトラック1では、コントローラ20によって、図6に示すフローチャートに従って、モニタ50の画面上にベッセル4上の積荷の有無が表示される。
すなわち、コントローラ20は、ステップS1において、ダンプトラック1の外周部に設置された6台のカメラ11〜16からそれぞれの撮像範囲における撮像画像を取得する。
【0048】
次に、コントローラ20は、ステップS2において、各カメラ11〜16から取得した画像を無限遠に視点変換した上で合成し、ダンプトラック1の360度全周囲をカバーした俯瞰画像200を生成する。
【0049】
次に、コントローラ20は、ステップS3において、ベッセル4上に積載されている積荷の重量(積載量)をペイロードメータECU21から取得する。なお、上述したように、ペイロードメータECU21から取得される積荷の重量のデータは、圧力センサ22およびストロークセンサ23における検出結果に基づいて、ペイロードメータECU21において算出される。
【0050】
次に、コントローラ20は、ステップS4において、ペイロードメータECU21から取得した積荷の重量(積載量)が、所定の閾値よりも大きいか否かを判定する。ここで、積荷の重量が閾値よりも大きい場合には、ステップS5へ進み、積荷の重量が閾値よりも小さい場合には、ステップS6へ進む。
【0051】
ステップS5では、コントローラ20は、ステップS4における判定結果を踏まえて、ベッセル4上に積荷がある状態と判断し、図5(b)に示すように、ベッセル画像4G上に積荷画像Cが表示されたダンプトラック1の画像1Gを合成してモニタ50に表示させる。
【0052】
一方、ステップS6では、コントローラ20は、ステップS4における判定結果を踏まえて、ベッセル4上に積荷がない状態と判断し、図5(a)に示すように、ベッセル画像4G上に積荷画像Cが表示されていないダンプトラック1の画像1Gを合成してモニタ50に表示させる。
【0053】
これにより、キャブ3内の運転者は、周辺監視用の俯瞰画像200上に表示されるダンプトラック1の画像1Gに積荷の画像Cが表示されているか否かによって、直感的に現在の積荷の有無を認識することができる。よって、運転者は、空荷の状態であるにもかかわらず積荷がある状態と誤解したり、積荷がある状態であるにもかかわらず空荷の状態であると誤解したりすることを防止できる。
【0054】
[他の実施形態]
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。
【0055】
(A)
上記実施形態では、ダンプトラック1の荷台上の積荷の重量の検知結果に応じて、積荷がない状態(未積載状態)と積荷がある状態(積載状態)とを切り換える例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0056】
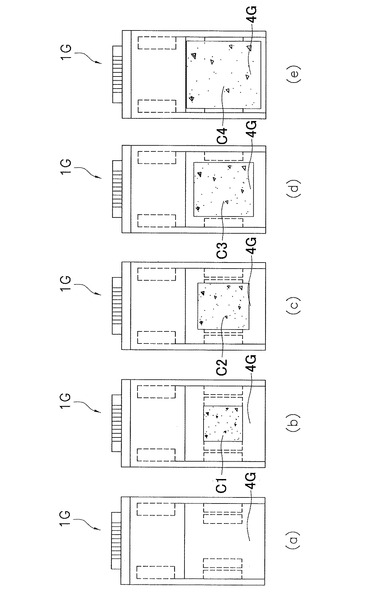
例えば、図7(a)〜図7(e)に示すように、積載重量の検知結果に応じて、積荷イメージの大きさを、積荷がない状態および積荷画像C1〜C4のように、5段階的で切り換えて表示してもよい。
【0057】
具体的な表示制御としては、例えば、ペイロードメータECU21において4段階の閾値を持たせておき、これらの閾値を超える積載重量を検知した場合には、その閾値に対応する段階の積荷画像C1〜C4を合成して表示させる。
この場合には、運転者は、積荷の有無だけでなく、積荷の積載量まで直感的に認識することができる。
【0058】
(B)
上記実施形態では、ダンプトラック1の荷台上の積荷の重量の検知結果に応じて、単に、積荷がない状態(未積載状態)と積荷がある状態(積載状態)とを切り換える例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0059】
例えば、ダンプトラックの画像を実際の車体色に合わせて黄色や橙色の警告色で表示し、積荷の画像を実際の積荷の色に合わせて茶色(土)や灰色(石)等の車体とは異なる色で表示する等して、画像の着色によって運転者に分かり易く表示することが好ましい。あるいは、積荷のイメージが見易くなるように、積荷のイメージの方を赤色や黄色、橙色等の警告色で表示してもよい。
【0060】
これにより、運転者は、車両の積載状態に関して、より直感的に積荷の有無を認識することができる。
なお、ダンプトラックの画像および積荷の画像については、上記色に限定されるものではなく、適宜、運転者が分かり易い警告色(黄、橙、赤等)に設定したり、運転者の好みで色を設定したりしてもよいし、画像部分を点滅させる等の手段によって運転者が認識し易いように表示してもよい。
【0061】
(C)
上記実施形態では、本発明に係るダンプトラックの積載量表示装置が、周辺監視装置10の一部の機能として設けられている例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
例えば、周辺監視装置と積載量表示装置とが別々に設けられていてもよい。
【0062】
(D)
上記実施形態では、ダンプトラック1の積載量を検知する検知部として、ベッセル4に積載された積荷の重量を検知するペイロードメータECU21を用いた例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0063】
例えば、ダンプトラックの積荷の有無を検知するセンサやカメラ等を、本発明の検知部として用いてもよい。
この場合には、積載重量を認識できないため段階的な積荷イメージの大きさの変更制御はできないものの、少なくとも積荷がある状態かない状態かについては認識することができる。このため、上記実施形態のように、積荷の有無を俯瞰画像上に表示することができるため、運転者は、モニタ画面を確認するだけで直感的に積荷の有無を確認することができる。
【0064】
(E)
上記実施形態では、ペイロードメータECU21における検知結果に基づいて、積荷画像Cを含むダンプトラック1の画像1Gと、積荷画像Cを含まないダンプトラック1の画像1Gとを切り換えて表示する例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0065】
例えば、ダンプトラックの画像と積荷の画像とを別々に用意して、積載量の検知結果に基づいて、ダンプトラックの画像上に積荷の画像を合成するか否かを切り換えてもよい。
【産業上の利用可能性】
【0066】
本発明のダンプトラックの積載量表示装置は、周辺監視用のモニタを確認するだけで荷台上の積荷の状態を直感的に認識することができるという効果を奏することから、荷台上に積荷を積載する各種建設機械に対して広く適用可能である。
【符号の説明】
【0067】
1 ダンプトラック
1G ダンプトラックの画像
2 車体フレーム
2A ロアデッキ部
2B アッパデッキ部
2C 可動式ラダー
2D 斜めラダー
3 キャブ
4 ベッセル
4G ベッセル画像
5 前輪
6 後輪
7 ベース
10 周辺監視装置(積載量表示装置)
11 前方カメラ
12 右側方第1カメラ
13 左側方第1カメラ
14 右側方第2カメラ
15 左側方第2カメラ
16 後方カメラ
20 コントローラ(表示制御部)
21 ペイロードメータECU(検知部)
22 圧力センサ(ペイロードメータ)
23 ストロークセンサ(ペイロードメータ)
31 油圧シリンダ
32 サスペンションシリンダ
50 モニタ(表示部)
200 俯瞰画像
C,C1〜C4 積荷画像
【技術分野】
【0001】
本発明は、ダンプトラックの積載量表示装置に関する。
【背景技術】
【0002】
鉱山作業などに用いられるダンプトラックは、一般的なトラックやバスに比べて格段に大きな車幅(例えば、約5m程度)を有している。そして、運転者が居るキャブは、車体前方のデッキ部上における左寄りの位置に設けられているため、運転者からは左前方の一部しか目視確認することができない。
【0003】
このため、ダンプトラックには、車体の周辺監視を行うために、キャブが配置されたデッキ部等に複数のカメラが設置されており、これらのカメラによって取得された画像を用いて生成された俯瞰画像をキャブ内に設置されたモニタ画面に表示して周辺監視が行われている。
【0004】
また、ダンプトラックのキャブ内に居る運転者は、キャブの後方にベッセル(荷台)が設けられているため、ベッセル上に土や鉱石等の積荷が積載されているか否かを、ミラー等を用いて目視確認することができない。
【0005】
例えば、特許文献1には、積荷を積載するボディ(荷台)を複数のサスペンションシリンダによって支持する運搬車両において、サスペンションシリンダの圧力を検出してダンプトラックの空荷荷重を確実に計測可能な車両の積荷重量計測装置について開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−112796号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記従来の積荷重量計測装置では、以下に示すような問題点を有している。
すなわち、上記公報に開示された積荷重量計測装置では、空荷荷重を確実に計測することができるものの、モニタに数値として表示されるだけであるため、キャブ内の運転者が積荷の状態を直感的に認識することが困難である。
【0008】
一方で、運転者が居るキャブ内には、上述した周辺監視用のモニタが設けられており、常時、ダンプトラックの合成画像とともに車両周辺の様子がモニタリングされている。
本発明の課題は、周辺監視用のモニタ画面を用いて、運転者に直感的に積荷状態を認識させることが可能なダンプトラックの積載量表示装置を提供することにある。
【課題を解決するための手段】
【0009】
第1の発明に係るダンプトラックの積載量表示装置は、複数のカメラが搭載されており、前記複数のカメラによって得られる画像を組み合わせた俯瞰画像を用いて周辺監視を行うダンプトラックの積載量表示装置であって、表示部と、検知部と、表示制御部と、を備えている。表示部は、ダンプトラックの画像を含む俯瞰画像を表示する。検知部は、ダンプトラックの積載量を検知する。表示制御部は、検知部における検知結果に基づいて、ダンプトラックの荷台上に画像表示される積荷イメージの大きさを切り換えて表示部に表示させる。
【0010】
ここでは、ダンプトラックの周辺監視用に用いられている俯瞰画像上において、ダンプトラックの荷台に載せられた積載量の検知結果に応じて、ダンプトラックの荷台上に画像表示される積荷のイメージの大きさを切り換えて表示する。
【0011】
ここで、上記積荷のイメージの大きさの切り換えには、積荷のイメージを表示する/表示しない、という表示切り換えも含まれる。また、検知部による積載量の検知としては、積荷の重量の検知、積荷の有無の検知等が含まれる。
【0012】
これにより、ダンプトラックの運転者は、例えば、荷台上に積荷がない状態であるかどうかを、キャブ内に設けられた周辺監視用のモニタを確認するだけで直感的に認識することができる。よって、運転者が空荷状態であると勘違いしてしまうことを防止することができる。
【0013】
第2の発明に係るダンプトラックの積載量表示装置は、第1の発明に係るダンプトラックの積載量表示装置であって、表示制御部は、検知部における検知結果に応じて、積荷イメージの大きさを段階的に切り換える。
【0014】
ここでは、周辺監視用のモニタに表示される俯瞰画像上に合成されるダンプトラックの積荷の大きさを、積載量の大きさに基づいて段階的に切り換えながら表示する。
これにより、運転者は、モニタ画面を見ながら、荷台上にどの程度の積載量であるかを容易に認識することができる。
【0015】
第3の発明に係るダンプトラックの積載量表示装置は、第1または第2の発明に係るダンプトラックの積載量表示装置であって、表示制御部は、ダンプトラックに荷台上に画像表示される積荷のイメージを、ダンプトラックの画像とは異なる色に着色して表示させる。
ここでは、俯瞰画像上に表示されたダンプトラックの荷台上に表示される積荷のイメージの画像を、ダンプトラックの画像とは異なる色、例えば、警告色(黄、橙、赤等)に着色して表示させる。
【0016】
これにより、運転者は、積荷のイメージの画像部分の有無を見易くなり、一見して直感的に判別することができる。
なお、積荷のイメージ部分に加えて、ダンプトラックの車体部分を着色して表示することで、積荷のイメージ部分との着色のコントラストをつけて、運転者が車両の積載状態をより分かり易くすることができる。
【0017】
第4の発明に係るダンプトラックの積載量表示装置は、第1から第3の発明のいずれか1つに係るダンプトラックの積載量表示装置であって、検知部は、荷台に積載された積荷の重量を測定するペイロードメータである。
【0018】
ここでは、積載量を検知する検知部として、ペイロードメータを用いている。
これにより、荷台上に載せられた積荷の重量を容易に検知することができる。
【0019】
第5の発明に係るダンプトラックの積載量表示装置は、第4の発明に係るダンプトラックの積載量表示装置であって、ペイロードメータは、荷台を下方から支持するサスペンションシリンダに取り付けられている。
【0020】
ここでは、上述したペイロードメータを、荷台を下方から支持するサスペンションシリンダに取り付けられている。
これにより、積荷の重量を直接的に受けるサスペンションシリンダにペイロードメータを設けることで、容易に積載量を検知することができる。
【発明の効果】
【0021】
本発明に係るダンプトラックの積載量表示装置によれば、周辺監視用のモニタを確認するだけで荷台上の積荷の状態を直感的に認識することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態に係るダンプトラック全体の構成を示す斜視図。
【図2】図1のダンプトラックの周辺監視装置の構成を示す制御ブロック図。
【図3】図1のダンプトラックに搭載されたカメラの配置を示す斜視図。
【図4】図1のダンプトラックに搭載されたサスペンションシリンダ等を示す模式図。
【図5】(a)は、図2のモニタ画面に表示される俯瞰画像上における積荷のない状態を示す図。(b)は、積荷がある状態を示す図。
【図6】図2の周辺監視装置による積載量表示制御の流れを示すフローチャート。
【図7】(a)〜(e)は、本発明の他の実施形態に係るダンプトラックの積載量表示装置による段階的な積載量の変化を示す図。
【発明を実施するための形態】
【0023】
本発明の一実施形態に係るダンプトラックの積載量表示装置について、図1〜図6を用いて説明すれば以下の通りである。
なお、以下の説明において、「前」「後」「左」「右」とは、運転席に着座して正面を向いている運転者から見た方向を基準とする方向を意味しており、「車幅方向」とは、「左右方向」と同義である。
【0024】
[ダンプトラック1全体の構成]
本実施形態に係るダンプトラック1は、鉱山作業などに用いられる自走式の超大型作業車両であって、約5mを超える車幅を有している。
【0025】
ダンプトラック1は、図1に示すように、主として、車体フレーム2と、キャブ3と、ベッセル(荷台)4と、左右一対の前輪5および後輪6と、図示しない給電用のパンタグラフを設置するベース7と、車両周囲を監視する周辺監視装置(積載量表示装置)10(図2参照)と、を備えている。なお、周辺監視装置10の構成および動作については、後段にて詳述する。
【0026】
車体フレーム2は、図示しないディーゼルエンジンやトランスミッション等の動力機構やその他の補機類を支持している。また、車体フレーム2の前部に左右一対の前輪5、後部に左右一対の後輪6がそれぞれ支持されている。車体フレーム2は、地面に近い側に設けられたロアデッキ部2Aと、ロアデッキ部2Aの上方に設けられたアッパデッキ部2Bと、を有している。
【0027】
ロアデッキ部2Aと地面との間には、乗降用の可動式ラダー2Cが2つ設けられている。また、ロアデッキ部2Aとアッパデッキ部2Bとの間には、ロアデッキ部2Aとアッパデッキ部2B間を行き来するための斜めラダー2Dが設けられている。さらに、アッパデッキ部2B上には、アッパデッキ部2Bの外周部分に沿って移動用の柵状の手すりが固定されている。
【0028】
キャブ3は、アッパデッキ部2B上における車幅方向の中央から左寄りの位置に配置され、4本の支柱によって構成されるROPS(Roll-Over-Protection Structure)構造を有している。運転者は、車体左側の路肩を容易に確認できる状態で走行するが、車体の周囲確認を行うためには頭を大きく動かす必要がある。また、アッパデッキ部2Bには、車両の周囲を確認するために、図示しないサイドミラーが複数設けられている。これらのサイドミラーは、キャブ3から離れた位置にあるため、運転者はサイドミラーを用いて周囲確認を行う際にも頭を大きく動かす必要がある。
【0029】
キャブ3内には、運転席、シフトレバー、コントローラ(表示制御部)20、モニタ(表示部)50、ハンドル、アクセルペダル、ブレーキペダル等が設けられている。なお、コントローラ20およびモニタ50は、後述する周辺監視装置10の一部を構成する。
【0030】
ベッセル4は、砕石等の重量物を積載するための荷台であって、後側底部において回動軸4aを介して車体フレーム2の後端部に回動可能に連結されている。これにより、ベッセル4は、油圧シリンダ31(図4参照)等のアクチュエータによって、前部が上方に回動して積載物を排出する起立姿勢と、前部がキャブ3の上部に位置する積載姿勢との範囲で回動させることができる。
【0031】
なお、ベッセル4に積載された積荷の重量を検知して、モニタ50に表示される俯瞰画面200(図5(a)等参照)上に積荷の有無を表示する制御については、後段にて詳述する。
【0032】
[周辺監視装置10の構成]
周辺監視装置10は、ダンプトラック1の周辺に存在する障害物の有無等を監視する装置であって、図2に示すように、6台のカメラ11〜16と、コントローラ20と、ペイロードメータECU(検知部)21と、圧力センサ22と、ストロークセンサ23と、モニタ50と、を有している。
【0033】
(カメラ11〜16)
6台のカメラ11〜16は、図3に示すように、ダンプトラック1の周囲360度範囲の画像を取得するためにダンプトラック1の外周部分にそれぞれ取り付けられている。なお、各カメラ11〜16は、左右方向において120度(左右60度ずつ)、高さ方向において96度の視野範囲を有している。
【0034】
前方カメラ11は、図3に示すように、斜めラダー2Dの最上段の踊り場部分の下部に、車体前方を向くように配置されている。そして、前方カメラ11の撮像範囲は、車両の前方である。
【0035】
右側方第1カメラ12は、図3に示すように、アッパデッキ部2Bの前側面右端部付近に、車体右斜め前方を向くように配置されている。そして、右側方第1カメラ12の撮像範囲は、車両の右斜め前方である。
【0036】
左側方第1カメラ13は、図3に示すように、第2カメラ12と左右対称位置、すなわちアッパデッキ部2Bの前側面左端部付近に、車体左斜め前方を向くように配置されている。そして、左側方第1カメラ13の撮像範囲は、車両の左斜め前方である。
【0037】
右側方第2カメラ14は、図3に示すように、アッパデッキ部2Bの右側面前端部付近に、車体右斜め後方を向くように配置されている。そして、右側方第2カメラ14の撮像範囲は、車両の右斜め後方である。
【0038】
左側方第2カメラ15は、図3に示すように、第4カメラと左右対称位置、すなわちアッパデッキ部2Bの左側面前端部付近に、車体左斜め後方を向くように配置されている。そして、左側方第2カメラ15の撮像範囲は、車両の左斜め後方である。
【0039】
後方カメラ16は、図3に示すように、車体フレーム2の後端付近に、車体後方を向くように配置されている。そして、後方カメラ16の撮像範囲は、車両後方である。
【0040】
以上の6台のカメラ11〜16によれば、図5(a)に示すように、ダンプトラック1の周囲360度の全周囲を含む俯瞰画像200を取得することができる。また、6台のカメラ11〜16は、それぞれ撮像した画像に対応する画像データをコントローラ20に送信する。
【0041】
(コントローラ20)
コントローラ20は、図2に示すように、各カメラ11〜16、ペイロードメータECU21、モニタ50に接続されている。
また、コントローラ20は、各カメラ11〜16から撮像画像を受信し、各カメラ11〜16によって撮像されたそれぞれの撮像範囲の画像を無限遠に視点を変換した後で合成して、図5(a)に示すような俯瞰画像200を生成する。
【0042】
さらに、コントローラ20は、ペイロードメータECU21から現在積載している積荷の重量に関するデータを受信して、図5(b)に示すように、俯瞰画像200上に積荷画像Cを合成してモニタ50に表示させる。
【0043】
(ペイロードメータECU21)
ペイロードメータECU21は、図2に示すように、圧力センサ22およびストロークセンサ23に接続されており、圧力センサ22およびストロークセンサ23から受信したデータを用いて積載重量を計測する車載型荷重計(ペイロードメータ)として機能する。
【0044】
また、ペイロードメータECU21に接続された圧力センサ22およびストロークセンサ23は、図4に示すように、ベッセル4を下方から支持するサスペンションシリンダ32に設けられている。
【0045】
これにより、サスペンションシリンダ32にかかる圧力を圧力センサ22によって検出するとともに、サスペンションシリンダ32のストローク量をストロークセンサ23において検出することで、ペイロードメータECU21においてベッセル4上に積載された積荷の重量を算出することができる。
【0046】
なお、ペイロードメータECU21において算出された積荷の重量に基づく積載量表示制御については、後段にて詳述する。
【0047】
<積載量表示制御>
本実施形態のダンプトラック1では、コントローラ20によって、図6に示すフローチャートに従って、モニタ50の画面上にベッセル4上の積荷の有無が表示される。
すなわち、コントローラ20は、ステップS1において、ダンプトラック1の外周部に設置された6台のカメラ11〜16からそれぞれの撮像範囲における撮像画像を取得する。
【0048】
次に、コントローラ20は、ステップS2において、各カメラ11〜16から取得した画像を無限遠に視点変換した上で合成し、ダンプトラック1の360度全周囲をカバーした俯瞰画像200を生成する。
【0049】
次に、コントローラ20は、ステップS3において、ベッセル4上に積載されている積荷の重量(積載量)をペイロードメータECU21から取得する。なお、上述したように、ペイロードメータECU21から取得される積荷の重量のデータは、圧力センサ22およびストロークセンサ23における検出結果に基づいて、ペイロードメータECU21において算出される。
【0050】
次に、コントローラ20は、ステップS4において、ペイロードメータECU21から取得した積荷の重量(積載量)が、所定の閾値よりも大きいか否かを判定する。ここで、積荷の重量が閾値よりも大きい場合には、ステップS5へ進み、積荷の重量が閾値よりも小さい場合には、ステップS6へ進む。
【0051】
ステップS5では、コントローラ20は、ステップS4における判定結果を踏まえて、ベッセル4上に積荷がある状態と判断し、図5(b)に示すように、ベッセル画像4G上に積荷画像Cが表示されたダンプトラック1の画像1Gを合成してモニタ50に表示させる。
【0052】
一方、ステップS6では、コントローラ20は、ステップS4における判定結果を踏まえて、ベッセル4上に積荷がない状態と判断し、図5(a)に示すように、ベッセル画像4G上に積荷画像Cが表示されていないダンプトラック1の画像1Gを合成してモニタ50に表示させる。
【0053】
これにより、キャブ3内の運転者は、周辺監視用の俯瞰画像200上に表示されるダンプトラック1の画像1Gに積荷の画像Cが表示されているか否かによって、直感的に現在の積荷の有無を認識することができる。よって、運転者は、空荷の状態であるにもかかわらず積荷がある状態と誤解したり、積荷がある状態であるにもかかわらず空荷の状態であると誤解したりすることを防止できる。
【0054】
[他の実施形態]
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。
【0055】
(A)
上記実施形態では、ダンプトラック1の荷台上の積荷の重量の検知結果に応じて、積荷がない状態(未積載状態)と積荷がある状態(積載状態)とを切り換える例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0056】
例えば、図7(a)〜図7(e)に示すように、積載重量の検知結果に応じて、積荷イメージの大きさを、積荷がない状態および積荷画像C1〜C4のように、5段階的で切り換えて表示してもよい。
【0057】
具体的な表示制御としては、例えば、ペイロードメータECU21において4段階の閾値を持たせておき、これらの閾値を超える積載重量を検知した場合には、その閾値に対応する段階の積荷画像C1〜C4を合成して表示させる。
この場合には、運転者は、積荷の有無だけでなく、積荷の積載量まで直感的に認識することができる。
【0058】
(B)
上記実施形態では、ダンプトラック1の荷台上の積荷の重量の検知結果に応じて、単に、積荷がない状態(未積載状態)と積荷がある状態(積載状態)とを切り換える例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0059】
例えば、ダンプトラックの画像を実際の車体色に合わせて黄色や橙色の警告色で表示し、積荷の画像を実際の積荷の色に合わせて茶色(土)や灰色(石)等の車体とは異なる色で表示する等して、画像の着色によって運転者に分かり易く表示することが好ましい。あるいは、積荷のイメージが見易くなるように、積荷のイメージの方を赤色や黄色、橙色等の警告色で表示してもよい。
【0060】
これにより、運転者は、車両の積載状態に関して、より直感的に積荷の有無を認識することができる。
なお、ダンプトラックの画像および積荷の画像については、上記色に限定されるものではなく、適宜、運転者が分かり易い警告色(黄、橙、赤等)に設定したり、運転者の好みで色を設定したりしてもよいし、画像部分を点滅させる等の手段によって運転者が認識し易いように表示してもよい。
【0061】
(C)
上記実施形態では、本発明に係るダンプトラックの積載量表示装置が、周辺監視装置10の一部の機能として設けられている例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
例えば、周辺監視装置と積載量表示装置とが別々に設けられていてもよい。
【0062】
(D)
上記実施形態では、ダンプトラック1の積載量を検知する検知部として、ベッセル4に積載された積荷の重量を検知するペイロードメータECU21を用いた例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0063】
例えば、ダンプトラックの積荷の有無を検知するセンサやカメラ等を、本発明の検知部として用いてもよい。
この場合には、積載重量を認識できないため段階的な積荷イメージの大きさの変更制御はできないものの、少なくとも積荷がある状態かない状態かについては認識することができる。このため、上記実施形態のように、積荷の有無を俯瞰画像上に表示することができるため、運転者は、モニタ画面を確認するだけで直感的に積荷の有無を確認することができる。
【0064】
(E)
上記実施形態では、ペイロードメータECU21における検知結果に基づいて、積荷画像Cを含むダンプトラック1の画像1Gと、積荷画像Cを含まないダンプトラック1の画像1Gとを切り換えて表示する例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0065】
例えば、ダンプトラックの画像と積荷の画像とを別々に用意して、積載量の検知結果に基づいて、ダンプトラックの画像上に積荷の画像を合成するか否かを切り換えてもよい。
【産業上の利用可能性】
【0066】
本発明のダンプトラックの積載量表示装置は、周辺監視用のモニタを確認するだけで荷台上の積荷の状態を直感的に認識することができるという効果を奏することから、荷台上に積荷を積載する各種建設機械に対して広く適用可能である。
【符号の説明】
【0067】
1 ダンプトラック
1G ダンプトラックの画像
2 車体フレーム
2A ロアデッキ部
2B アッパデッキ部
2C 可動式ラダー
2D 斜めラダー
3 キャブ
4 ベッセル
4G ベッセル画像
5 前輪
6 後輪
7 ベース
10 周辺監視装置(積載量表示装置)
11 前方カメラ
12 右側方第1カメラ
13 左側方第1カメラ
14 右側方第2カメラ
15 左側方第2カメラ
16 後方カメラ
20 コントローラ(表示制御部)
21 ペイロードメータECU(検知部)
22 圧力センサ(ペイロードメータ)
23 ストロークセンサ(ペイロードメータ)
31 油圧シリンダ
32 サスペンションシリンダ
50 モニタ(表示部)
200 俯瞰画像
C,C1〜C4 積荷画像
【特許請求の範囲】
【請求項1】
複数のカメラが搭載されており、前記複数のカメラによって得られる画像を組み合わせた俯瞰画像を用いて周辺監視を行うダンプトラックの積載量表示装置であって、
前記ダンプトラックの画像を含む前記俯瞰画像を表示する表示部と、
前記ダンプトラックの積載量を検知する検知部と、
前記検知部における検知結果に基づいて、前記ダンプトラックの荷台上に画像表示される積荷イメージの大きさを切り換えて前記表示部に表示させる表示制御部と、
を備えているダンプトラックの積載量表示装置。
【請求項2】
前記表示制御部は、前記検知部における検知結果に応じて、前記積荷イメージの大きさを段階的に切り換える、
請求項1に記載のダンプトラックの積載量表示装置。
【請求項3】
前記表示制御部は、前記ダンプトラックに荷台上に画像表示される前記積荷のイメージを、前記ダンプトラックの画像とは異なる色に着色して表示させる、
請求項1または2に記載のダンプトラックの積載量表示装置。
【請求項4】
前記検知部は、前記荷台に積載された積荷の重量を測定するペイロードメータである、
請求項1から3のいずれか1項に記載のダンプトラックの積載量表示装置。
【請求項5】
前記ペイロードメータは、前記荷台を下方から支持するサスペンションシリンダに取付けられている、
請求項4に記載のダンプトラックの積載量表示装置。
【請求項1】
複数のカメラが搭載されており、前記複数のカメラによって得られる画像を組み合わせた俯瞰画像を用いて周辺監視を行うダンプトラックの積載量表示装置であって、
前記ダンプトラックの画像を含む前記俯瞰画像を表示する表示部と、
前記ダンプトラックの積載量を検知する検知部と、
前記検知部における検知結果に基づいて、前記ダンプトラックの荷台上に画像表示される積荷イメージの大きさを切り換えて前記表示部に表示させる表示制御部と、
を備えているダンプトラックの積載量表示装置。
【請求項2】
前記表示制御部は、前記検知部における検知結果に応じて、前記積荷イメージの大きさを段階的に切り換える、
請求項1に記載のダンプトラックの積載量表示装置。
【請求項3】
前記表示制御部は、前記ダンプトラックに荷台上に画像表示される前記積荷のイメージを、前記ダンプトラックの画像とは異なる色に着色して表示させる、
請求項1または2に記載のダンプトラックの積載量表示装置。
【請求項4】
前記検知部は、前記荷台に積載された積荷の重量を測定するペイロードメータである、
請求項1から3のいずれか1項に記載のダンプトラックの積載量表示装置。
【請求項5】
前記ペイロードメータは、前記荷台を下方から支持するサスペンションシリンダに取付けられている、
請求項4に記載のダンプトラックの積載量表示装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−250694(P2012−250694A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−127225(P2011−127225)
【出願日】平成23年6月7日(2011.6.7)
【出願人】(000001236)株式会社小松製作所 (1,686)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年6月7日(2011.6.7)
【出願人】(000001236)株式会社小松製作所 (1,686)
[ Back to top ]