
小型で背丈の低い光ナビゲーションデバイス
【課題】携帯機器向けの背丈の低いポインティングデバイスを提供すること。
【解決手段】指の隆線のような表面テクスチャの撮影画像を比較することにより、指のような光学的平面ではない表面の相対移動を検出する光ナビゲーションデバイス。ハウジングの中に光源とセンサアレイを近接配置する。センサアレイは基板に取り付けられる。撮影すべき表面とセンサアレイの間にレンズアレイを配置し、ユーザの指の表面のような表面の一対一画像を二次元センサアレイ上に形成する。マイクロレンズアレイをセンサアレイの各画素に対応するように設計し、あるいは、レンズアレイの各要素を使用してセンサの画素のグループをカバーする。マイクロレンズアレイは、画像がセンサアレイ上に形成されるような位置に配置され、あるいは、画像の焦点が表面から外れるような空間的平面に配置される。
【解決手段】指の隆線のような表面テクスチャの撮影画像を比較することにより、指のような光学的平面ではない表面の相対移動を検出する光ナビゲーションデバイス。ハウジングの中に光源とセンサアレイを近接配置する。センサアレイは基板に取り付けられる。撮影すべき表面とセンサアレイの間にレンズアレイを配置し、ユーザの指の表面のような表面の一対一画像を二次元センサアレイ上に形成する。マイクロレンズアレイをセンサアレイの各画素に対応するように設計し、あるいは、レンズアレイの各要素を使用してセンサの画素のグループをカバーする。マイクロレンズアレイは、画像がセンサアレイ上に形成されるような位置に配置され、あるいは、画像の焦点が表面から外れるような空間的平面に配置される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は光学入力装置に関する。
【背景技術】
【0002】
可搬携帯電子機器のかつてない普及に伴ない、小型で低コストなポインティングデバイスの必要性が急増している。光学マウスの内部に使用される光ナビゲーション技術は、精度、信頼性、及び、自由度において、他の解決手段に比べて多くの利点を持つ。しかしながら、従来のマウスセンサは大きすぎて、携帯電話や携帯情報端末(PDA)のような携帯電子機器に使用することができない。
【0003】
光学マウスセンサは、ナビゲーション表面からの反射によって得られた撮影画像間の変化をトラッキングすることにより、相対移動を検出する。ナビゲーション画像は、発光ダイオード(LED)によって斜めに照明された表面上の影と光のパターンである場合もあれば、コヒーレント光源を使用してナビゲーション表面に形成された回折像又は斑点である場合もある。光学マウスの心臓部は、光源、画像センサ、及び例えば撮像レンズのような光学部品(光学部品を更に含む場合もあれば含まない場合もある)からなるナビゲーションモジュールである。例えばLEDやレーザのような光源を使用して、ナビゲーション表面を照らしながら、光学部品の撮像部により、ナビゲーション画像が画像センサアレイ上に形成される。撮像レンズは一般に、ナビゲーション画像を二次元センサアレイ上に形成するのに使用される。一般的なマウスセンサモジュールのサイズは非常に大きく、特に高さが高い。デスクトップコンピュータのマウスのような用途における光ナビゲーション技術の普及において、モジュールサイズが大きいことは問題にならなかった。しかしながら、この技術を携帯電話やPDAのような形態電子機器に応用する場合、モジュールサイズが大きいことは普及の妨げとなる。携帯電子機器の場合、2mm程度の厚さのポインティングデバイスが望ましいのに対し、通常のマウスセンサモジュールでは、ナビゲーション表面とセンサとの間に10mm以上の隙間が必要となる。
【0004】
従来の光学マウスセンサは大きすぎて、特に、装置アセンブリの高さが原因で、携帯電話のような携帯電子機器に組み込むことができない。一般的な光学マウスセンサでは、ナビゲーションに必要な撮影条件を確保するために、ナビゲーション表面と画像センサとの間に14mm以上の隙間が必要となる。現行のモジュール設計によれば、撮影機能は、単一のレンズ要素によって実施されるのが一般的である。ナビゲーション表面と画像センサとの間の最小間隔は、センサの画素サイズ、アレイサイズ、光学的効率(即ち、F番号)、及び、所望の光学倍率によって制限を受ける。
【0005】
従来のマウスセンサモジュールの高さは、主として撮像光学部品の高さによって制限を受ける。一般的には、一枚のプラスチック成形レンズを単位倍率で使用し、50μmピッチの20×20画素の二次元センサが使用される。最初の要件として、一対一の撮影を実現するためには、ナビゲーション表面とセンサの間の間隔は、撮像レンズの焦点距離の4倍になるであろう。ナビゲーション表面とセンサの間の間隔が短くなるのに従って、撮像レンズの焦点距離も短くしなければならない。そのため理論上は非常に短い焦点距離のレンズを設計することも可能であり、従って、センサとナビゲーション表面との間の隙間を2mm近くにすることも可能であるが、実際には、妥当な光収集効率を得るために、レンズの開口サイズを考慮しなければならない。レンズ焦点距離とレンズの直径の比率は、レンズのF番号と呼ばれる。実際には、良好な画像品質で広い視野をカバーすることが可能な、1未満のF番号を持つ単一要素の屈折レンズを作成することは難しい。そのため、一般的な光学マウスセンサモジュールでは、センサとナビゲーション表面との間に10mm以上の隙間が必要となる。
【発明の開示】
【発明が解決しようとする課題】
【0006】
従って、本発明の1つの目的は、背丈の低いポインティングデバイスを提供することである。
【課題を解決するための手段】
【0007】
指の隆線のような表面テクスチャの撮影画像を比較することにより、指のような光学的平面ではない表面の相対移動を検出する光ナビゲーションデバイス。ハウジングの中に、光源とセンサアレイを近接配置する。センサアレイは基板に取り付けられる。撮影すべき表面とセンサアレイとの間にレンズアレイを配置し、ユーザの指の表面のような表面の一対一画像が二次元(2D)センサアレイ上に形成されるようにする。マイクロレンズはセンサアレイの各画素に対応するように設計され、あるいは、レンズアレイの各要素を使用してセンサの画素グループをカバーする。マイクロレンズは、画像がセンサアレイ上に形成される位置に配置され、あるいは、画像の焦点が表面から外れるような空間的平面に形成される。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施形態を示す図である。
【図2A】本発明の一実施形態を示す図である。
【図2B】本発明の一実施形態を示す図である。
【図2C】本発明の一実施形態を示す図である。
【発明を実施するための形態】
【0009】
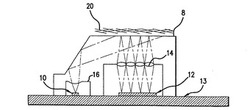
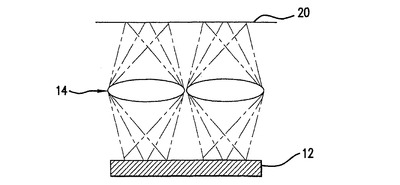
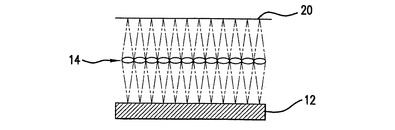
図1に示すように、本発明の一実施形態では、従来の光ナビゲーションデバイスにおける単一の撮像レンズに代えて、レンズアレイを使用する。ハウジング8の中に、光源10とセンサアレイ12を近接配置する。センサアレイ12は基板13(例えばプリント回路基板(PCB))に取り付けられる。レンズアレイ14は、光源10から発せられた光が表面20で反射されるような位置に配置される。レンズアレイ14は、M×N個の要素を有する。ただし、M>1、N≧1である。レンズアレイ14は、表面20からの反射光を収集し、その下にある二次元センサアレイ上にパターンを形成する。例えば、LEDを光源10として使用した場合、レンズアレイ14を使用すれば、例えばユーザの指の表面のような表面の画像を形成することができる。図2A〜図2Cに示すように、レンズアレイ14の各要素がセンサアレイの各画素に対応するように設計される場合もあれば(図2B)、レンズアレイの各要素を使用してセンサの画素グループをカバーする場合もあり(図2B)、あるいは、レンズアレイの各要素を使用してセンサの1つの画素領域の一部をカバーする場合もある(図2C)。レンズアレイ14は、表面20の画像がセンサアレイ上に形成されるような位置に配置することができ、又は、表面20とは空間的に異なる平面における画像がセンサアレイ上に形成されるような位置に配置される。
【0010】
光学レンズ16は、光源10と表面20の間に配置され、表面20において出力ビームは実質的に平行化される。光が、例として描かれている。本発明の概念は、約1ナノメートル(nm)〜約1メートル(m)の波長範囲にわたる電磁放射を含むように拡張することができる。
【0011】
デバイスの全高を大幅に低くできる理由は、単一レンズ要素の場合のF番号を維持したまま、レンズアレイ14の各要素の焦点距離を非常に短くすることができるからである。
【0012】
光源10には、レーザダイオードや面発光レーザのようなコヒーレント光源が使用される。あるいは、光源には、非コヒーレント光源、若しくは、発光ダイオード(LED)や広帯域光源のような準コヒーレント光源を使用することもでき、広帯域光源は光学フィルタを備えていてもいなくてもよい。この実施形態では、光源10がハウジング8の中に収容されているように描かれているが、例えば周辺光(環境光)のような外部光源を使用して表面を照らしてもよい。また、表面が、例えばエレクトロルミネッセンスのような蛍光材料を有する場合のように、表面それ自体が自己発光するものであってもよい。
【0013】
レンズアレイ14は、屈折性要素から構成されるものであっても、回折性要素から構成されるものであってもよく、複合型の要素から構成されるものであってもよい。
【0014】
センサアレイ12には、電荷結合素子(CCD)又は相補型金属酸化膜半導体(CMOS)の撮像アレイが使用される。センサアレイ12は、レンズアレイによって形成されたパターンを撮影する位置に配置されることが望ましい。このパターンは、表面に直接対応するものであってもよいし、表面情報からの導出物(例えば、表面からの反射光によって生成される斑点パターンや干渉縞)であってもよい。
【0015】
本発明によれば、異なる光学設計概念を使用することにより、表面とセンサアレイの間に必要とされる隙間を大幅に短くすることができ、従って、ナビゲーションモジュールの全高を低くすることができる。
【0016】
図1に示すように、複数要素のレンズアレイを使用することにより、同じセンサアレイを使用した単一レンズの光学特性(例えばF番号)と同じ光学特性を維持したまま、表面からセンサアレイまでの距離を劇的に短縮することができる。
【0017】
撮像レンズの光収集効率は、単一要素レンズの場合の光収集効率と同じ又はそれ以上に設計することができる。マイクロレンズアレイは、各要素がセンサアレイの1つの画素に対応するように設計してもよいし、各要素が画像をセンサの画素グループにマッピングするように設計してもよいし、センサの各画素がレンズ要素のグループに対応するように設計してもよい。
【0018】
マイクロレンズアレイの製造は種々の方法によって行うことができ、例えば、エッチング、リフロー、複製、又は、モールディングによって行うことができる。本発明の一実施形態によれば、レンズアレイはウェハレベルでセンサアレイに一体化される。他の実施形態において、レンズアレイは表面とセンサの間に配置された独立した要素にする場合がある。
【0019】
本発明の種々の例示的実施形態を以下に列挙する。
1.ハウジングと、
N>1、N≧1として、表面から電磁波を収集するための要素のM×Nアレイと、
前記電磁波を受信するためのセンサアレイを有し、第1の軸及び第2の軸に沿った方向の相対移動を判定する移動検出回路と
からなる装置。
2.前記電磁波は、可視光、赤外線、マイクロ波、音波からなるグループの中から選択される、1に記載の装置。
3.前記ハウジングの中に配置され、電磁波を前記表面に向けて放射する光源を更に含む、2に記載の装置。
4.前記M×Nアレイの各要素は、前記センサアレイにおけるセンサの少なくとも一部に対応する、3に記載の装置。
5.前記M×Nアレイの各要素は、前記センサアレイにおける単一のセンサに対応する、3に記載の装置。
6.前記M×Nアレイの各要素は、前記センサアレイ内のセンサのグループに対応する、3に記載の装置。
7.前記光源は可視光又は赤外線を放射する、3に記載の装置。
8.前記M×Nアレイの各要素はレンズである、7に記載の装置。
9.前記レンズは、屈折性、回折性、又は複合型の要素である、8に記載の装置。
10.前記光源は、コヒーレント光源、準コヒーレント光源、及び非コヒーレント光源のうちのいずれか1つである、3に記載の装置。
11.前記光源はコヒーレント光源であり、該コヒーレント光源は、レーザダイオード及び面発光レーザからなるグループの中から選択される、10に記載の装置。
12.前記光源は非コヒーレント光源又は準コヒーレント光源であり、該光源は、発光ダイオード(LED)及び広帯域光源からなるグループの中から選択される、3に記載の装置。
13.前記センサアレイは、CCD撮像素子及びCMOS撮像素子のうちのいずれか一方である、3に記載の装置。
14.前記表面のパターンを前記センサアレイ上に形成する位置に配置されたM×Nアレイを更に含む、3に記載の装置。
15.前記表面とは空間的に異なる平面の画像を前記画像センサ上に形成する位置に配置されるM×Nアレイを更に含む、3に記載の装置。
16.前記パターンは、斑点、回折像、及び、表面画像からなるグループの中から選択される、3に記載の装置。
17.電磁気発生源を表面に向けて使用するステップと、
M>1、N≧1として収集要素のM×Nアレイを使用することにより表面の反射に対応するパターンを形成するステップと、
センサアレイを使用して一連のパターンを検出するステップと、
前記パターンを分析し、相対移動を判定するステップと、
からなる方法。
18.前記電磁気発生源は、光波長範囲の光を放射し、前記パターンは、斑点、回折像、及び表面画像からなるグループの中から選択される、17に記載の方法。
19.前記光源は、レーザダイオード及び面発光レーザからなるグループの中から選択されたコヒーレント光源である、18に記載の方法。
20.前記光源は、非コヒーレント光源及び準コヒーレント光源のうちのいずれか一方であり、前記光源は、発光ダイオード(LED)及び広帯域光源からなるグループの中から選択される、18に記載の方法。
21.前記センサアレイは、CCD画像アレイ及びCMOS画像アレイのうちのいずれか一方であり、
前記M×Nアレイはレンズアレイである、17に記載の方法。
22.前記M×Nアレイは、前記表面からのパターンを前記センサアレイ上に形成する位置に配置される、21に記載の方法。
23.前記M×Nアレイは、前記表面とは空間的に異なる平面における画像を前記センサアレイ上に形成する位置に配置される、21に記載の方法。
【技術分野】
【0001】
本発明は光学入力装置に関する。
【背景技術】
【0002】
可搬携帯電子機器のかつてない普及に伴ない、小型で低コストなポインティングデバイスの必要性が急増している。光学マウスの内部に使用される光ナビゲーション技術は、精度、信頼性、及び、自由度において、他の解決手段に比べて多くの利点を持つ。しかしながら、従来のマウスセンサは大きすぎて、携帯電話や携帯情報端末(PDA)のような携帯電子機器に使用することができない。
【0003】
光学マウスセンサは、ナビゲーション表面からの反射によって得られた撮影画像間の変化をトラッキングすることにより、相対移動を検出する。ナビゲーション画像は、発光ダイオード(LED)によって斜めに照明された表面上の影と光のパターンである場合もあれば、コヒーレント光源を使用してナビゲーション表面に形成された回折像又は斑点である場合もある。光学マウスの心臓部は、光源、画像センサ、及び例えば撮像レンズのような光学部品(光学部品を更に含む場合もあれば含まない場合もある)からなるナビゲーションモジュールである。例えばLEDやレーザのような光源を使用して、ナビゲーション表面を照らしながら、光学部品の撮像部により、ナビゲーション画像が画像センサアレイ上に形成される。撮像レンズは一般に、ナビゲーション画像を二次元センサアレイ上に形成するのに使用される。一般的なマウスセンサモジュールのサイズは非常に大きく、特に高さが高い。デスクトップコンピュータのマウスのような用途における光ナビゲーション技術の普及において、モジュールサイズが大きいことは問題にならなかった。しかしながら、この技術を携帯電話やPDAのような形態電子機器に応用する場合、モジュールサイズが大きいことは普及の妨げとなる。携帯電子機器の場合、2mm程度の厚さのポインティングデバイスが望ましいのに対し、通常のマウスセンサモジュールでは、ナビゲーション表面とセンサとの間に10mm以上の隙間が必要となる。
【0004】
従来の光学マウスセンサは大きすぎて、特に、装置アセンブリの高さが原因で、携帯電話のような携帯電子機器に組み込むことができない。一般的な光学マウスセンサでは、ナビゲーションに必要な撮影条件を確保するために、ナビゲーション表面と画像センサとの間に14mm以上の隙間が必要となる。現行のモジュール設計によれば、撮影機能は、単一のレンズ要素によって実施されるのが一般的である。ナビゲーション表面と画像センサとの間の最小間隔は、センサの画素サイズ、アレイサイズ、光学的効率(即ち、F番号)、及び、所望の光学倍率によって制限を受ける。
【0005】
従来のマウスセンサモジュールの高さは、主として撮像光学部品の高さによって制限を受ける。一般的には、一枚のプラスチック成形レンズを単位倍率で使用し、50μmピッチの20×20画素の二次元センサが使用される。最初の要件として、一対一の撮影を実現するためには、ナビゲーション表面とセンサの間の間隔は、撮像レンズの焦点距離の4倍になるであろう。ナビゲーション表面とセンサの間の間隔が短くなるのに従って、撮像レンズの焦点距離も短くしなければならない。そのため理論上は非常に短い焦点距離のレンズを設計することも可能であり、従って、センサとナビゲーション表面との間の隙間を2mm近くにすることも可能であるが、実際には、妥当な光収集効率を得るために、レンズの開口サイズを考慮しなければならない。レンズ焦点距離とレンズの直径の比率は、レンズのF番号と呼ばれる。実際には、良好な画像品質で広い視野をカバーすることが可能な、1未満のF番号を持つ単一要素の屈折レンズを作成することは難しい。そのため、一般的な光学マウスセンサモジュールでは、センサとナビゲーション表面との間に10mm以上の隙間が必要となる。
【発明の開示】
【発明が解決しようとする課題】
【0006】
従って、本発明の1つの目的は、背丈の低いポインティングデバイスを提供することである。
【課題を解決するための手段】
【0007】
指の隆線のような表面テクスチャの撮影画像を比較することにより、指のような光学的平面ではない表面の相対移動を検出する光ナビゲーションデバイス。ハウジングの中に、光源とセンサアレイを近接配置する。センサアレイは基板に取り付けられる。撮影すべき表面とセンサアレイとの間にレンズアレイを配置し、ユーザの指の表面のような表面の一対一画像が二次元(2D)センサアレイ上に形成されるようにする。マイクロレンズはセンサアレイの各画素に対応するように設計され、あるいは、レンズアレイの各要素を使用してセンサの画素グループをカバーする。マイクロレンズは、画像がセンサアレイ上に形成される位置に配置され、あるいは、画像の焦点が表面から外れるような空間的平面に形成される。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施形態を示す図である。
【図2A】本発明の一実施形態を示す図である。
【図2B】本発明の一実施形態を示す図である。
【図2C】本発明の一実施形態を示す図である。
【発明を実施するための形態】
【0009】
図1に示すように、本発明の一実施形態では、従来の光ナビゲーションデバイスにおける単一の撮像レンズに代えて、レンズアレイを使用する。ハウジング8の中に、光源10とセンサアレイ12を近接配置する。センサアレイ12は基板13(例えばプリント回路基板(PCB))に取り付けられる。レンズアレイ14は、光源10から発せられた光が表面20で反射されるような位置に配置される。レンズアレイ14は、M×N個の要素を有する。ただし、M>1、N≧1である。レンズアレイ14は、表面20からの反射光を収集し、その下にある二次元センサアレイ上にパターンを形成する。例えば、LEDを光源10として使用した場合、レンズアレイ14を使用すれば、例えばユーザの指の表面のような表面の画像を形成することができる。図2A〜図2Cに示すように、レンズアレイ14の各要素がセンサアレイの各画素に対応するように設計される場合もあれば(図2B)、レンズアレイの各要素を使用してセンサの画素グループをカバーする場合もあり(図2B)、あるいは、レンズアレイの各要素を使用してセンサの1つの画素領域の一部をカバーする場合もある(図2C)。レンズアレイ14は、表面20の画像がセンサアレイ上に形成されるような位置に配置することができ、又は、表面20とは空間的に異なる平面における画像がセンサアレイ上に形成されるような位置に配置される。
【0010】
光学レンズ16は、光源10と表面20の間に配置され、表面20において出力ビームは実質的に平行化される。光が、例として描かれている。本発明の概念は、約1ナノメートル(nm)〜約1メートル(m)の波長範囲にわたる電磁放射を含むように拡張することができる。
【0011】
デバイスの全高を大幅に低くできる理由は、単一レンズ要素の場合のF番号を維持したまま、レンズアレイ14の各要素の焦点距離を非常に短くすることができるからである。
【0012】
光源10には、レーザダイオードや面発光レーザのようなコヒーレント光源が使用される。あるいは、光源には、非コヒーレント光源、若しくは、発光ダイオード(LED)や広帯域光源のような準コヒーレント光源を使用することもでき、広帯域光源は光学フィルタを備えていてもいなくてもよい。この実施形態では、光源10がハウジング8の中に収容されているように描かれているが、例えば周辺光(環境光)のような外部光源を使用して表面を照らしてもよい。また、表面が、例えばエレクトロルミネッセンスのような蛍光材料を有する場合のように、表面それ自体が自己発光するものであってもよい。
【0013】
レンズアレイ14は、屈折性要素から構成されるものであっても、回折性要素から構成されるものであってもよく、複合型の要素から構成されるものであってもよい。
【0014】
センサアレイ12には、電荷結合素子(CCD)又は相補型金属酸化膜半導体(CMOS)の撮像アレイが使用される。センサアレイ12は、レンズアレイによって形成されたパターンを撮影する位置に配置されることが望ましい。このパターンは、表面に直接対応するものであってもよいし、表面情報からの導出物(例えば、表面からの反射光によって生成される斑点パターンや干渉縞)であってもよい。
【0015】
本発明によれば、異なる光学設計概念を使用することにより、表面とセンサアレイの間に必要とされる隙間を大幅に短くすることができ、従って、ナビゲーションモジュールの全高を低くすることができる。
【0016】
図1に示すように、複数要素のレンズアレイを使用することにより、同じセンサアレイを使用した単一レンズの光学特性(例えばF番号)と同じ光学特性を維持したまま、表面からセンサアレイまでの距離を劇的に短縮することができる。
【0017】
撮像レンズの光収集効率は、単一要素レンズの場合の光収集効率と同じ又はそれ以上に設計することができる。マイクロレンズアレイは、各要素がセンサアレイの1つの画素に対応するように設計してもよいし、各要素が画像をセンサの画素グループにマッピングするように設計してもよいし、センサの各画素がレンズ要素のグループに対応するように設計してもよい。
【0018】
マイクロレンズアレイの製造は種々の方法によって行うことができ、例えば、エッチング、リフロー、複製、又は、モールディングによって行うことができる。本発明の一実施形態によれば、レンズアレイはウェハレベルでセンサアレイに一体化される。他の実施形態において、レンズアレイは表面とセンサの間に配置された独立した要素にする場合がある。
【0019】
本発明の種々の例示的実施形態を以下に列挙する。
1.ハウジングと、
N>1、N≧1として、表面から電磁波を収集するための要素のM×Nアレイと、
前記電磁波を受信するためのセンサアレイを有し、第1の軸及び第2の軸に沿った方向の相対移動を判定する移動検出回路と
からなる装置。
2.前記電磁波は、可視光、赤外線、マイクロ波、音波からなるグループの中から選択される、1に記載の装置。
3.前記ハウジングの中に配置され、電磁波を前記表面に向けて放射する光源を更に含む、2に記載の装置。
4.前記M×Nアレイの各要素は、前記センサアレイにおけるセンサの少なくとも一部に対応する、3に記載の装置。
5.前記M×Nアレイの各要素は、前記センサアレイにおける単一のセンサに対応する、3に記載の装置。
6.前記M×Nアレイの各要素は、前記センサアレイ内のセンサのグループに対応する、3に記載の装置。
7.前記光源は可視光又は赤外線を放射する、3に記載の装置。
8.前記M×Nアレイの各要素はレンズである、7に記載の装置。
9.前記レンズは、屈折性、回折性、又は複合型の要素である、8に記載の装置。
10.前記光源は、コヒーレント光源、準コヒーレント光源、及び非コヒーレント光源のうちのいずれか1つである、3に記載の装置。
11.前記光源はコヒーレント光源であり、該コヒーレント光源は、レーザダイオード及び面発光レーザからなるグループの中から選択される、10に記載の装置。
12.前記光源は非コヒーレント光源又は準コヒーレント光源であり、該光源は、発光ダイオード(LED)及び広帯域光源からなるグループの中から選択される、3に記載の装置。
13.前記センサアレイは、CCD撮像素子及びCMOS撮像素子のうちのいずれか一方である、3に記載の装置。
14.前記表面のパターンを前記センサアレイ上に形成する位置に配置されたM×Nアレイを更に含む、3に記載の装置。
15.前記表面とは空間的に異なる平面の画像を前記画像センサ上に形成する位置に配置されるM×Nアレイを更に含む、3に記載の装置。
16.前記パターンは、斑点、回折像、及び、表面画像からなるグループの中から選択される、3に記載の装置。
17.電磁気発生源を表面に向けて使用するステップと、
M>1、N≧1として収集要素のM×Nアレイを使用することにより表面の反射に対応するパターンを形成するステップと、
センサアレイを使用して一連のパターンを検出するステップと、
前記パターンを分析し、相対移動を判定するステップと、
からなる方法。
18.前記電磁気発生源は、光波長範囲の光を放射し、前記パターンは、斑点、回折像、及び表面画像からなるグループの中から選択される、17に記載の方法。
19.前記光源は、レーザダイオード及び面発光レーザからなるグループの中から選択されたコヒーレント光源である、18に記載の方法。
20.前記光源は、非コヒーレント光源及び準コヒーレント光源のうちのいずれか一方であり、前記光源は、発光ダイオード(LED)及び広帯域光源からなるグループの中から選択される、18に記載の方法。
21.前記センサアレイは、CCD画像アレイ及びCMOS画像アレイのうちのいずれか一方であり、
前記M×Nアレイはレンズアレイである、17に記載の方法。
22.前記M×Nアレイは、前記表面からのパターンを前記センサアレイ上に形成する位置に配置される、21に記載の方法。
23.前記M×Nアレイは、前記表面とは空間的に異なる平面における画像を前記センサアレイ上に形成する位置に配置される、21に記載の方法。
【特許請求の範囲】
【請求項1】
ハウジングと、
N>1、N≧1として、表面から電磁波を収集するための要素のM×Nアレイと、
前記電磁波を受信するためのセンサアレイを有し、第1の軸及び第2の軸に沿った方向の相対移動を判定する移動検出回路と
からなる装置。
【請求項2】
前記電磁波は、可視光、赤外線、マイクロ波、音波からなるグループの中から選択される、請求項1に記載の装置。
【請求項3】
前記ハウジングの中に配置され、電磁波を前記表面に向けて放射する光源を更に含む、請求項2に記載の装置。
【請求項4】
前記M×Nアレイの各要素は、前記センサアレイにおけるセンサの少なくとも一部に対応する、請求項3に記載の装置。
【請求項5】
前記M×Nアレイの各要素は、前記センサアレイにおける単一のセンサに対応する、請求項3に記載の装置。
【請求項6】
前記M×Nアレイの各要素は、前記センサアレイ内のセンサのグループに対応する、請求項3に記載の装置。
【請求項7】
前記光源は可視光又は赤外線を放射する、請求項3に記載の装置。
【請求項8】
前記M×Nアレイの各要素はレンズである、請求項7に記載の装置。
【請求項9】
前記レンズは、屈折性、回折性、又は複合型の要素である、請求項8に記載の装置。
【請求項10】
前記光源は、コヒーレント光源、準コヒーレント光源、及び非コヒーレント光源のうちのいずれか1つである、請求項3に記載の装置。
【請求項11】
前記光源はコヒーレント光源であり、該コヒーレント光源は、レーザダイオード及び面発光レーザからなるグループの中から選択される、請求項10に記載の装置。
【請求項12】
前記光源は非コヒーレント光源又は準コヒーレント光源であり、該光源は、発光ダイオード(LED)及び広帯域光源からなるグループの中から選択される、請求項3に記載の装置。
【請求項13】
前記センサアレイは、CCD撮像素子及びCMOS撮像素子のうちのいずれか一方である、請求項3に記載の装置。
【請求項14】
前記表面のパターンを前記センサアレイ上に形成する位置に配置されたM×Nアレイを更に含む、請求項3に記載の装置。
【請求項15】
前記表面とは空間的に異なる平面の画像を前記画像センサ上に形成する位置に配置されるM×Nアレイを更に含む、請求項3に記載の装置。
【請求項16】
前記パターンは、斑点、回折像、及び、表面画像からなるグループの中から選択される、請求項3に記載の装置。
【請求項17】
電磁気発生源を表面に向けて使用するステップと、
M>1、N≧1として収集要素のM×Nアレイを使用することにより表面の反射に対応するパターンを形成するステップと、
センサアレイを使用して一連のパターンを検出するステップと、
前記パターンを分析し、相対移動を判定するステップと、
からなる方法。
【請求項18】
前記電磁気発生源は、光波長範囲の光を放射し、前記パターンは、斑点、回折像、及び表面画像からなるグループの中から選択される、請求項17に記載の方法。
【請求項19】
前記光源は、レーザダイオード及び面発光レーザからなるグループの中から選択されたコヒーレント光源である、請求項18に記載の方法。
【請求項20】
前記光源は、非コヒーレント光源及び準コヒーレント光源のうちのいずれか一方であり、前記光源は、発光ダイオード(LED)及び広帯域光源からなるグループの中から選択される、請求項18に記載の方法。
【請求項21】
前記センサアレイは、CCD画像アレイ及びCMOS画像アレイのうちのいずれか一方であり、
前記M×Nアレイはレンズアレイである、請求項17に記載の方法。
【請求項22】
前記M×Nアレイは、前記表面からのパターンを前記センサアレイ上に形成する位置に配置される、請求項21に記載の方法。
【請求項23】
前記M×Nアレイは、前記表面とは空間的に異なる平面における画像を前記センサアレイ上に形成する位置に配置される、請求項21に記載の方法。
【請求項1】
ハウジングと、
N>1、N≧1として、表面から電磁波を収集するための要素のM×Nアレイと、
前記電磁波を受信するためのセンサアレイを有し、第1の軸及び第2の軸に沿った方向の相対移動を判定する移動検出回路と
からなる装置。
【請求項2】
前記電磁波は、可視光、赤外線、マイクロ波、音波からなるグループの中から選択される、請求項1に記載の装置。
【請求項3】
前記ハウジングの中に配置され、電磁波を前記表面に向けて放射する光源を更に含む、請求項2に記載の装置。
【請求項4】
前記M×Nアレイの各要素は、前記センサアレイにおけるセンサの少なくとも一部に対応する、請求項3に記載の装置。
【請求項5】
前記M×Nアレイの各要素は、前記センサアレイにおける単一のセンサに対応する、請求項3に記載の装置。
【請求項6】
前記M×Nアレイの各要素は、前記センサアレイ内のセンサのグループに対応する、請求項3に記載の装置。
【請求項7】
前記光源は可視光又は赤外線を放射する、請求項3に記載の装置。
【請求項8】
前記M×Nアレイの各要素はレンズである、請求項7に記載の装置。
【請求項9】
前記レンズは、屈折性、回折性、又は複合型の要素である、請求項8に記載の装置。
【請求項10】
前記光源は、コヒーレント光源、準コヒーレント光源、及び非コヒーレント光源のうちのいずれか1つである、請求項3に記載の装置。
【請求項11】
前記光源はコヒーレント光源であり、該コヒーレント光源は、レーザダイオード及び面発光レーザからなるグループの中から選択される、請求項10に記載の装置。
【請求項12】
前記光源は非コヒーレント光源又は準コヒーレント光源であり、該光源は、発光ダイオード(LED)及び広帯域光源からなるグループの中から選択される、請求項3に記載の装置。
【請求項13】
前記センサアレイは、CCD撮像素子及びCMOS撮像素子のうちのいずれか一方である、請求項3に記載の装置。
【請求項14】
前記表面のパターンを前記センサアレイ上に形成する位置に配置されたM×Nアレイを更に含む、請求項3に記載の装置。
【請求項15】
前記表面とは空間的に異なる平面の画像を前記画像センサ上に形成する位置に配置されるM×Nアレイを更に含む、請求項3に記載の装置。
【請求項16】
前記パターンは、斑点、回折像、及び、表面画像からなるグループの中から選択される、請求項3に記載の装置。
【請求項17】
電磁気発生源を表面に向けて使用するステップと、
M>1、N≧1として収集要素のM×Nアレイを使用することにより表面の反射に対応するパターンを形成するステップと、
センサアレイを使用して一連のパターンを検出するステップと、
前記パターンを分析し、相対移動を判定するステップと、
からなる方法。
【請求項18】
前記電磁気発生源は、光波長範囲の光を放射し、前記パターンは、斑点、回折像、及び表面画像からなるグループの中から選択される、請求項17に記載の方法。
【請求項19】
前記光源は、レーザダイオード及び面発光レーザからなるグループの中から選択されたコヒーレント光源である、請求項18に記載の方法。
【請求項20】
前記光源は、非コヒーレント光源及び準コヒーレント光源のうちのいずれか一方であり、前記光源は、発光ダイオード(LED)及び広帯域光源からなるグループの中から選択される、請求項18に記載の方法。
【請求項21】
前記センサアレイは、CCD画像アレイ及びCMOS画像アレイのうちのいずれか一方であり、
前記M×Nアレイはレンズアレイである、請求項17に記載の方法。
【請求項22】
前記M×Nアレイは、前記表面からのパターンを前記センサアレイ上に形成する位置に配置される、請求項21に記載の方法。
【請求項23】
前記M×Nアレイは、前記表面とは空間的に異なる平面における画像を前記センサアレイ上に形成する位置に配置される、請求項21に記載の方法。
【図1】



【図2A】

【図2B】
【図2C】
【図2A】
【図2B】
【図2C】
【公開番号】特開2012−181880(P2012−181880A)
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願番号】特願2012−145426(P2012−145426)
【出願日】平成24年6月28日(2012.6.28)
【分割の表示】特願2006−75850(P2006−75850)の分割
【原出願日】平成18年3月20日(2006.3.20)
【出願人】(506076606)アバゴ・テクノロジーズ・ジェネラル・アイピー(シンガポール)プライベート・リミテッド (129)
【Fターム(参考)】
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願日】平成24年6月28日(2012.6.28)
【分割の表示】特願2006−75850(P2006−75850)の分割
【原出願日】平成18年3月20日(2006.3.20)
【出願人】(506076606)アバゴ・テクノロジーズ・ジェネラル・アイピー(シンガポール)プライベート・リミテッド (129)
【Fターム(参考)】
[ Back to top ]