
微小付着物剥離システムおよび微小付着物剥離方法

【課題】基材の表面に付着した大きさが1mm以下の微小付着物に大きな損傷を与えることなくかつ選択的に剥がすことができる微小付着物剥離システムを提供する。
【解決手段】微小付着物剥離システム100は、細胞からなる微小付着物Wを観察するための顕微鏡110を備えている。顕微鏡110のステージ111の周囲には、微小付着物Wを剥がすためのヘラ状の剥離具140を変位可能に保持する剥離具変位装置130および剥離した微小付着物Wを培養基Cごと吸引する付着物吸引装置150が設けられている。ユーザは、コントローラ160および外部コンピュータ装置170を介して剥離具変位装置130を操作することにより剥離具140の挿込部141をシャーレSの底部表面に押し付けた状態で変位させて微小付着物Wを剥離させるとともに剥離した微小付着物Wを付着物吸引装置150によって吸引して捕捉する。
【解決手段】微小付着物剥離システム100は、細胞からなる微小付着物Wを観察するための顕微鏡110を備えている。顕微鏡110のステージ111の周囲には、微小付着物Wを剥がすためのヘラ状の剥離具140を変位可能に保持する剥離具変位装置130および剥離した微小付着物Wを培養基Cごと吸引する付着物吸引装置150が設けられている。ユーザは、コントローラ160および外部コンピュータ装置170を介して剥離具変位装置130を操作することにより剥離具140の挿込部141をシャーレSの底部表面に押し付けた状態で変位させて微小付着物Wを剥離させるとともに剥離した微小付着物Wを付着物吸引装置150によって吸引して捕捉する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、基材の表面に付着した大きさが顕微鏡で観察可能な大きさの微小付着物、特には、流体中の基材の表面に付着した細胞や微生物などの生体試料を生きた状態で剥がすことができる微小付着物剥離システムおよび微小付着物剥離方法に関する。
【背景技術】
【0002】
従来から、医療分野においては、シャーレなどの培養器内の溶液中から単一の細胞、または数個の細胞を捕捉する場合、マイクロピペットが用いられている。マイクロピペットは、例えば、下記特許文献1,2に示すように、先端部が開口した長細い管体に形成されており、この管体内の圧力を下げることにより前記先端部から溶液中の細胞を1つずつ吸引して捕捉することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−152044号公報
【特許文献2】特開2009−34013号公報
【0004】
しかしながら、上記特許文献1,2に記載されたマイクロピペットにおいては、溶液中に漂動する細胞を捕捉することができるが、シャーレなどの基材の表面に付着した細胞を捕捉することができないという問題がある。例えば、医療分野においては、培養基で満たしたシャーレ内で細胞を培養すると、培養した細胞がシャーレの表面に付着するため、培養した細胞を傷つけることなく生きた状態でシャーレの表面から採取することが極めて困難である。また、シャーレ内に多数培養される細胞の中から特定の細胞を選択的に取り出すことも極めて困難であるという問題もあった。
【発明の概要】
【0005】
本発明は上記問題に対処するためなされたもので、その目的は、基材の表面に付着した大きさが1mm以下の微小付着物に大きな損傷を与えることなくかつ選択的に剥がすことができる微小付着物剥離システムを提供することにある。
【0006】
上記目的を達成するため、請求項1に記載した本発明の特徴は、基材の表面に付着した大きさが1mm以下の微小付着物を流体内で基材の表面から剥がすための微小付着物剥離システムであって、基材の表面に付着した微小付着物を拡大して観察するための顕微鏡と、ヘラ状に形成された剥離具を保持するとともに同剥離具の先端部を基材の表面に押し付けた状態で同剥離具を基材の表面上で相対変位させることができる剥離具変位手段と、基材から剥がされた微小付着物を捕捉するための付着物捕捉手段と、剥離具変位手段の作動を制御するための制御手段とを備えたことにある。この場合、微小付着物の大きさとは、微小付着物を平面視した場合における最も長い両端部間の長さである。そして、この微小付着物の大きさは、顕微鏡によって視認できる大きさであり概ね1mm以下の大きさである。
【0007】
このように構成した請求項1に記載した本発明の特徴によれば、微小付着物剥離システムは、ヘラ状に形成された剥離具の先端部を基材の表面に押し付けた状態で変位させることにより基材表面と微小付着物との間に剥離具の先端部を挿し入れて微小付着物を基材の表面から剥がすことができる。そして、微小付着物剥離システムは、基材表面から剥がした微小付着物を捕捉手段により捕捉することができる。これらにより、微小付着物剥離システムは、基材の表面に付着した大きさが1mm以下の微小付着物に大きな損傷を与えることなくかつ選択的に剥がすことができる。
【0008】
また、請求項2に記載した本発明の他の特徴は、前記微小付着物剥離システムにおいて、付着物捕捉手段は、基材の表面から剥がされた微小付着物を流体の吸引を介して捕捉することにある。
【0009】
このように構成した請求項2に係る本発明の他の特徴によれば、微小付着物剥離システムは、付着物捕捉手段が基材の表面から剥がされた微小付着物を流体の吸引を介して捕捉する。これにより、基材表面から剥がされた微小付着物を物理的な接触を避けて損傷することなく捕捉することができるとともに、捕捉した微小付着物を損傷することなく他の場所に移すこともできる。
【0010】
また、請求項3に記載した本発明の他の特徴は、前記微小付着物剥離システムにおいて、制御手段は、剥離具変位手段の作動を制御して剥離具を前記基材に押し付けた状態で同剥離具を基材と微小付着物との間に挿し入れて微小付着物を基材の表面から剥がすことにある。
【0011】
このように構成した請求項3に係る本発明の他の特徴によれば、微小付着物剥離システムは、制御手段が剥離具変位手段を制御することにより剥離具を基材と付着物との間に挿し入れて微小付着物を基材の表面から剥がす。これにより、ユーザは、制御手段に対して微小付着物の剥離作業を指示するだけで基材の表面から微小付着物を自動的に剥がすことができるため、容易に精度良く微小付着物を剥がすことができる。
【0012】
また、請求項4に記載した本発明の他の特徴は、前記微小付着物剥離システムにおいて、微小付着物は、生体試料であり、顕微鏡は、光学式顕微鏡であることにある。
【0013】
このように構成した請求項4に係る本発明の他の特徴によれば、微小付着物剥離システムは、微小付着物が生体試料であるとともに顕微鏡が光学式顕微鏡で構成されている。これにより、微小付着物剥離システムは、基材表面に付着した生体試料を生きた状態で基材表面から剥がすことができる。なお、この場合、生体試料とは、生きた状態の細菌、酵母、原生動植物、菌類、藻類などの微生物である。また、光学顕微鏡は、可視光線を利用した顕微鏡であり、例えば、正立顕微鏡、倒立顕微鏡、位相差顕微鏡、微分干渉顕微鏡、蛍光顕微鏡、明視野照明顕微鏡、暗視野照明顕微鏡および落射照明顕微鏡などがある。
【0014】
また、請求項5に記載した本発明の他の特徴は、前記微小付着物剥離システムにおいて、剥離具は、基材の表面に押し付けられた際の撓み変形量に応じた電気信号を出力する変形検出センサを備えており、制御部は、変形検出センサからの電気信号を用いて剥離具を所定の圧力で基材の表面に押し付けることにある。
【0015】
このように構成した請求項5に係る本発明の他の特徴によれば、微小付着物剥離システムは、剥離具が基材の表面に押し付けられた際の撓み変形量に応じた電気信号を出力する変形検出センサ(例えば、圧電素子)を備えているとともに、制御部が変形検出センサから電気信号を用いて剥離具を所定の圧力で基材の表面に押し付けるように構成されている。これにより、微小付着物剥離システムは、剥離具を正確な圧力で基材表面に押圧することができ、剥離具の基材表面への密着性を確保しつつ剥離具の損傷を防止しながら精度良く微小付着物を基材表面から剥がすことができる。
【0016】
また、請求項6に記載した本発明の他の特徴は、前記微小付着物剥離システムにおいて、剥離具は、先端部の幅が少なくとも微小付着物の幅よりも広いことにある。
【0017】
このように構成した請求項6に係る本発明の他の特徴によれば、微小付着物剥離システムは、剥離具における先端部の幅が少なくとも微小付着物の幅よりも広い幅で形成されている。これにより、微小付着物剥離システムは、剥離具の先端部を微小付着物の付着面全体に挿し入れることができ、精度良く微小付着物を基材表面から剥がすことができる。
【0018】
また、請求項7に記載した本発明の他の特徴は、前記微小付着物剥離システムにおいて、剥離具は、上面が先端部側から上方に向って傾斜して形成されていることにある。
【0019】
このように構成した請求項7に係る本発明の他の特徴によれば、微小付着物剥離システムは、剥離具における上面が先端部側から上方に向って傾斜して形成されている。これにより、微小付着物剥離システムは、剥離具の先端部を基材表面と微小付着物との間に挿し入れた際、効果的に微小付着物を基材表面から剥がすことができる。
【0020】
また、本発明は、微小付着物剥離システムとして実施できるばかりでなく、微小付着物剥離方法としても実施できるものである。
【0021】
具体的には、請求項8に示すように、基材の表面に付着した大きさが1mm以下の微小付着物を流体内で基材の表面から剥がすための微小付着物剥離方法であって、基材の表面に付着した微小付着物を拡大して観察するための顕微鏡と、ヘラ状に形成された剥離具を保持するとともに同剥離具の先端部を基材の表面に押し付けた状態で同剥離具を基材の表面上で相対変位させることができる剥離具変位手段と、基材から剥がされた微小付着物を捕捉するための付着物捕捉手段と、剥離具変位手段の作動を制御するための制御手段とを用意しておき、顕微鏡で基材の表面に付着した微小付着物の拡大像を観察しながら、制御手段を介して剥離具変位手段の作動を制御することにより、剥離具の先端部を基材の表面に押し付けた状態で相対変位させることによって微小付着物を基材から剥がし、基材から剥がされた微小付着物を付着物捕捉手段によって捕捉するようにする。これによれば、前記微小付着物剥離システムと同様な作用効果を期待することができる。
【図面の簡単な説明】
【0022】
【図1】本発明に係る微小付着物剥離システムのシステム構成を模式的に示した一部破断正面図である。
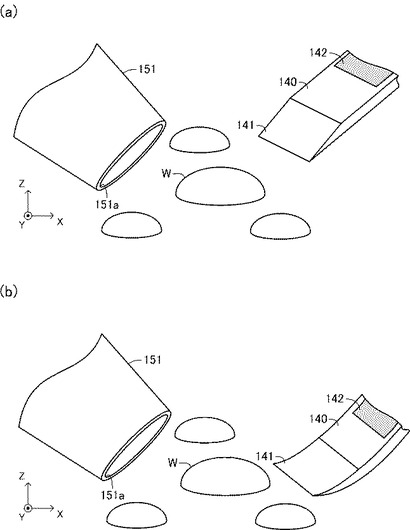
【図2】(a),(b)は図1に示した微小付着物剥離システムによって微小付着物を剥がす様子を模式的に示した斜視図であり、(a)は剥離具をシャーレの底部表面に押し付ける前の状態を示しており、(b)は剥離具をシャーレの底部表面に押し付けた状態を示している。
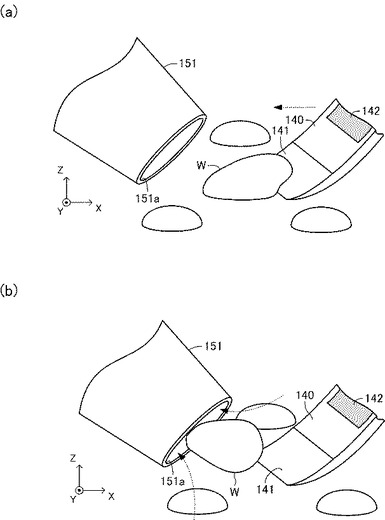
【図3】(a),(b)は図1に示した微小付着物剥離システムによって微小付着物を剥がす様子を模式的に示した斜視図であり、(b)は剥離具をシャーレの底部表面と微小付着物の底部との間に挿し込んだ状態を示しており、(b)は剥離した微小付着物をマイクロピペットで吸引する状態を示している。
【図4】本発明に係る変形例に係る微小付着物剥離システムによって微小付着物を剥がす様子を模式的に示した斜視図である。
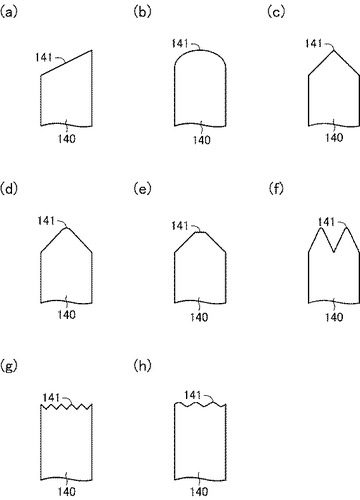
【図5】(a)〜(h)は本発明に係る他の変形例に係る剥離具の挿込部の形状のバリエーションを模式的に示した剥離具の平面図である。
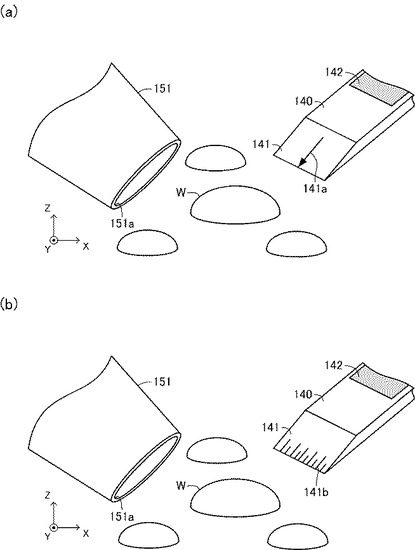
【図6】(a),(b)は本発明に係る他の変形例に係る剥離具の挿込部を模式的に示した剥離具の平面図であり、(a)は剥離具の挿込部にセンタリングなどに用いる矢印線を付した剥離具を示しており、(b)は剥離具の挿込部に大きさや距離は測るための目盛りを付した剥離具を示している。
【図7】本発明に係る他の変形例に係る剥離具によって微小付着物を剥がす様子を模式的に示した斜視図である。
【図8】本発明に係る他の変形例に係る剥離具によって微小付着物を剥がす様子を模式的に示した斜視図である。
【発明を実施するための形態】
【0023】
以下、本発明に係る微小付着物剥離システムの一実施形態について図面を参照しながら説明する。図1は、本発明に係る微小付着物剥離システム100のシステム構成を模式的に示した一部破断正面図である。なお、本明細書において参照する図は、本発明の理解を容易にするために一部の構成要素を誇張して表わすなど模式的に表している。このため、各構成要素間の寸法や比率などは異なっていることがある。この微小付着物剥離システム100は、シャーレS内の培養基C中で培養した生きた細胞からなる微小付着物WをシャーレSの底部表面から剥がすための機械装置群である。
【0024】
(微小付着物剥離システム100の構成)
微小付着物剥離システム100は、顕微鏡110を備えている。顕微鏡110は、シャーレS内で培養した微小付着物Wを拡大して観察するための装置であり、主として、ステージ111、ベース部112、光学系113および照明部114によって構成されている。ステージ111は、観察対象を載置するための載置台であり、金属板の中央部に透過性ガラスが嵌め込まれて構成されている。このステージ111は、図示しない変位機構によって互いに直交する3軸方向、具体的には、図示X軸方向(図示Y軸、Z軸に直交する図示左右方向)、図示Y軸方向(図示X軸、Z軸に直交する図示奥行き方向)および図示Z軸方向(シャーレSの底面に対して垂直方向)にそれぞれ変位するようにベース部112上に支持されている。
【0025】
ベース部112は、ステージ111を含む顕微鏡110の各構成要素を支持する基台であり、金属製の箱状に形成されている。このベース部112内には、ステージ111を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させる前記変位機構の他に光学系113が設けられている。光学系113は、ステージ111上に載置されたシャーレS内を観察するための光学器具の集まりであり、光を集中、反射および屈折させる複数の光学器具によって構成されている。具体的には、光学系113は、対物レンズ113a、反射鏡113bおよび接眼レンズ113cなどによって構成されている。これらのうち、対物レンズ113aは、ステージ111の下方にステージ111と対向して配置されている。また、反射鏡113bは、ベース部112内に配置されて対物レンズ113aを透過した光を接眼レンズ113cに導く。また、接眼レンズ113cは、ベース部112における図示左側上部に張り出した状態で設けられている。
【0026】
ステージ111の上方には照明部114が設けられている。照明部114は、ステージ111上に載置された観察対象物に対して光を照射するための光学装置であり、光を発する光源およびこの光源から発せられた光を観察対象物上に集光するコンデンサレンズ(図示せず)などによって構成されている。本実施形態においては、照明部114は、ハロゲンランプを光源として構成されている。すなわち、本実施形態における顕微鏡110は、落射照明型の倒立顕微鏡である。
【0027】
顕微鏡110のベース部112におけるステージ111を支持する円筒状の支持部112aの周囲には、テーブル120が設けられている。テーブル120は、顕微鏡110のステージ111の周辺に剥離具変位装置130および付着物捕捉装置150をそれぞれ配置するための支持台である。これらのうち、剥離具変位装置130は、後述する剥離具140を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させる機械装置であり、主として粗駆動変位装置131および微駆動変位装置132によって構成されている。
【0028】
粗駆動変位装置131は、微駆動変位装置132を支持しながらこの微駆動変位装置1132を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させる機械装置であり、後述するコントローラ160によって作動が制御される図示しないX軸方向アクチュエータ、Y軸方向アクチュエータおよびZ軸方向アクチュエータを備えて構成されている。この場合、これらのX軸方向アクチュエータ、Y軸方向アクチュエータおよびZ軸方向アクチュエータは、それぞれ粗駆動用の電動モータによって構成されており、微駆動変位装置132を各軸方向ごとに粗送り(mm/s)することができる。
【0029】
微駆動変位装置132は、剥離具140を保持しながらこの剥離具140を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させる機械装置であり、コントローラ160によって作動が制御される図示しないX軸方向アクチュエータ、Y軸方向アクチュエータおよびZ軸方向アクチュエータを備えて構成されている。この場合、これらのうち、X軸方向アクチュエータおよびY軸方向アクチュエータは、弾性ヒンジを利用した微駆動用の圧電素子(図示せず)によって構成されており、剥離具140を図示X軸方向および図示Y軸方向にそれぞれ精密送り(nm/s)することができる。また、Z軸方向アクチュエータは、積層型の圧電素子(図示せず)によって構成されており、剥離具140を図示Z軸方向に精密送り(nm/s)することができる。なお、本実施形態においては、剥離具変位装置130は、AFM(原子間力顕微鏡)においてカンチレバーを変位させるための変位装置を用いている。
【0030】
剥離具140は、シャーレSの底部に付着している微小付着物Wを剥がすためのヘラ状の部品であり、板状のシリコン材によって構成されている。この剥離具140は、平面視で略長方形状に形成されており、図2(a),(b)〜図3(a),(b)に示すように、一方(図示左側)の先端部に刃状の挿込部141が形成されるとともに他方の端部が微駆動変位装置132に着脱自在に保持されている。より具体的には、剥離具140は、剥離具140の図示下面が平面状に形成される一方で、挿込部141の上面が先端側から他方の端部側に向って厚さが厚くなるように上方に向って傾斜して形成されている。また、剥離具140の挿込部141の幅は、微小付着物Wの幅よりも広い幅に形成されている。本実施形態においては、剥離具140の挿込部141の幅は、約50μmに形成されている。
【0031】
この剥離具140における微駆動変位装置132に保持される側の上面には、フィルム状の歪みゲージ142が設けられている。歪みゲージ142は、剥離具140の撓み量に応じて抵抗値が変化する圧力センサである。この歪みゲージ142は、図示しない電気配線およびブリッジ回路を介してコントローラ160に接続されている。この場合、歪みゲージ142とコントローラ160とを繋ぐ電気配線の一部を構成するアルミニウム配線が、剥離具140を溶液中で使用した場合に電気化学反応により溶解して断線することがある。このため、剥離具140には、剥離具140の配線電位より正電位を印加して剥離具140の配線電位を還元電極するための白金からなる犠牲電極(図示せず)が設けられている。
【0032】
付着物捕捉装置150は、シャーレS内で剥がした微小付着物Wを吸引により捕捉するとともに吸引した微小付着物Wを吐出して開放する機械装置であり、主としてマイクロピペット151および吸引装置152によって構成されている。マイクロピペット151は、シャーレS内で剥がされた微小付着物Wを吸引して捕捉する器具であり、先端部が開口した長細い管状に形成されている。この場合、マイクロピペット151における先端部の開口した部分は、微小付着物Wをマイクロピペット151内に導入する吸引口151aであり、微小付着物Wの大きさより大きな径に形成されている。
【0033】
このマイクロピペット151は、他方の端部がシリコンチューブを介して吸引装置152に接続された状態で図示しない支持具によって顕微鏡110のステージ111上に図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ可動的に支持されている。一方、吸引装置152は、マイクロピペット151内の圧力を下げるまたは圧力を上げるためのポンプ装置であり、外部コンピュータ装置170によって作動が制御される。
【0034】
コントローラ160は、CPU、ROM、RAMなどからなるマイクロコンピュータによって構成されており、外部コンピュータ装置170からの指示に従って剥離具変位装置130の作動を制御する。より具体的には、コントローラ160は、外部コンピュータ装置170からの指示に従って粗駆動変位装置131および微駆動変位装置132の作動をそれぞれ制御する。また、コントローラ160は、外部コンピュータ装置170からの指示に従って微駆動変位装置132の作動を制御することにより、シャーレSの底部に押し付けられた剥離具140の撓み量を一定に保つ押圧力のフィードバック制御を実行する。具体的には、コントローラ140は、ユーザにより予め設定された撓み量または押圧力に関するパラメータと剥離具140に設けられた歪みゲージ142からの検出信号とを用いて微駆動変位装置132の作動を制御することにより、剥離具140を図示Z軸方向に変位させて撓み量を一定に保つ。
【0035】
外部コンピュータ装置170は、CPU、ROM、RAM、ハードディスクなどからなるマイクロコンピュータによって構成されており、キーボード、マウスおよびハプティックデバイスからなる入力装置171からの指示に従って、図示しない制御プログラムを実行することによりコントローラ160および付着物捕捉装置150の吸引装置152の作動をそれぞれ制御する。この場合、ハプティックデバイスは、ユーザが棒状の操作子を操作することによりユーザに対して力のフィードバックを与えることができる力覚フィードバックデバイスであり、本実施形態においては、剥離具140に加えられた力を感じることができる。また、外部コンピュータ装置170は、液晶ディスプレイからなる表示装置172を備えており、外部コンピュータ装置170の作動状態を適宜表示させる。すなわち、本実施形態において外部コンピュータ装置170は、個人向けパーソナルコンピュータ(所謂パソコン)を想定している。なお、外部コンピュータ装置170は、パソコンを想定しているが、前記各機能を実行できる形式のものであれば、他の形式のコンピュータであってもよいことは当然である。
【0036】
(微小付着物剥離システム100の作動)
次に、上記のように構成した微小付着物剥離システム100の作動について説明する。まず、ユーザは、微小付着物剥離システム100によって剥がす対象となる微小付着物Wが付着したシャーレSを用意する。本実施形態においては、ユーザは、ガラス製のシャーレS内に液体の培養基Cを入れた培地内で培養した大きさが略40μm程度の細胞を微小付着物Wとして用意する。この場合、シャーレS内には、複数の細胞が微小付着物Wとして存在している。
【0037】
次いで、ユーザは、用意したシャーレSを顕微鏡110のステージ111上にセットする。具体的には、ユーザは、シャーレSをステージ111上に固定的に配置した後、顕微鏡110の光源部114を点灯させた状態で接眼レンズ113cを覗きながら顕微鏡110の視野内に微小付着物Wが位置するようにステージ111の位置を調節する。
【0038】
次に、ユーザは、シャーレS内における微小付着物Wの近傍に剥離具140およびマイクロピペット151の吸引口151aを配置する。具体的には、ユーザは、外部コンピュータ装置170の入力装置171を操作することにより剥離具変位装置130を外部コンピュータ装置170の入力装置171によって駆動可能なモードに設定する。これにより、剥離具変位装置130を構成する粗駆動変位装置131および微駆動変位装置132は、ユーザによるハプティックデバイスやマウスなどの入力装置171の操作量に応じた駆動量で駆動する状態となる。
【0039】
次に、ユーザは、図2(a)に示すように、接眼レンズ113cを覗きながらハプティックデバイスやマウスなどの入力装置171を操作することにより剥離具140の位置を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させて剥離対象となる微小付着物Wの近傍に位置決めする。また、ユーザは、マイクロピペット151の吸引口151aがシャーレS内における剥離対象となる微小付着物Wの近傍に位置するようにマイクロピペット151の位置および姿勢を調整する。
【0040】
次に、ユーザは、剥離具140の挿込部141をシャーレSの底部表面に押し付けた状態とする。具体的には、ユーザは、図2(b)に示すように、前記と同様に接眼レンズ113cを覗きながら入力装置171を操作することにより剥離具140の位置を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させて微小付着物Wの近傍のシャーレSの底部表面に剥離具140の挿込部141を押し付ける。これにより、剥離具140は、挿込部141がシャーレSの底部表面に密着した状態で撓み変形する。次いで、ユーザは、入力装置171を操作することによりコントローラ160に対して剥離具140の撓み量を一定に保つ押圧力のフィードバック制御の実行の開始を指示する。
【0041】
この指示に応答して、コントローラ160は、剥離具140に設けられている歪みゲージ142からの検出信号を用いて微駆動変位装置132の作動を制御することにより、剥離具140の撓み量、換言すれば剥離具140のシャーレSの底部表面への押圧力を一定に保つ。なお、コントローラ160によるこの剥離具140の撓み量を一定に保つ押圧力のフィードバック制御の実行中においては、コントローラ160は、入力装置171による剥離具変位装置130に対する図示Z軸方向への駆動指令を無効とする。すなわち、剥離具140の撓み量を一定に保つ制御の実行中においては、ユーザは剥離具140を図示Z軸方向に変位させることができない。
【0042】
次に、ユーザは、微小付着物WをシャーレSの底部表面から剥離させる。具体的には、ユーザは、図3(a)に示すように、接眼レンズ113cを覗きながら入力装置171を操作することにより剥離具140の位置を図示X軸方向および図示Y軸方向にそれぞれ変位させて剥離具140の挿込部141をシャーレSの底部表面と微小付着物Wの底部との間に挿し入れる。この場合、ユーザは、入力装置171を操作することにより剥離具140の挿込部141をシャーレSの底部表面と微小付着物Wの底部との間に一方的に挿し込む(破線矢印参照)または同挿込部141をシャーレSの底部表面と微小付着物Wの底部との間に出し入れしながら微小付着物WをシャーレSの底部から剥がす。この微小付着物Wの剥がし作業の間、コントローラ160は、歪みゲージ142からの検出信号を用いて微駆動変位装置132の作動を制御して剥離具140の撓み量(剥離具140の押圧力)を一定に保つ。
【0043】
そして、ユーザは、図3(b)に示すように、顕微鏡110により微小付着物Wの状態を観察しながら微小付着物WがシャーレSの底部表面から離脱したことを確認した場合には、入力装置171を操作することにより外部コンピュータ装置170を介して付着物捕捉装置150の吸引装置152を作動させる。この場合、外部コンピュータ装置150は、極めて短い時間(1秒以内)だけ吸引装置152を作動させる。これにより、シャーレSの底部表面から離脱した微小付着物Wのみがマイクロピペット151の吸引口151aから培養基Cとともに吸引されて同マイクロピペット151内に捕捉される。
【0044】
次に、ユーザは、入力装置172を操作することによりコントローラ160に対して剥離具140の撓み量を一定に保つ押圧力のフィードバック制御の実行の中断を指示する。これにより、コントローラ160は、剥離具140の撓み量を一定に保つ制御の実行を中断する。次いで、ユーザは、接眼レンズ113cを覗きながら入力装置171を操作することにより剥離具140の位置を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させて剥離具140の挿込部141の位置をシャーレSの底部から離隔させる。これにより、微小付着物Wの剥離作業が終了する。
【0045】
なお、マイクロピペット151内に捕捉した微小付着物Wは、微小付着物Wの利用目的に応じてシャーレS内の別の場所またはシャーレS内とは異なるシャーレS外の場所、すなわち、微小付着物Wの利用目的に応じた場所でマイクロピペット151内から吐出されて利用される。この場合においても、ユーザは、入力装置171を操作することにより外部コンピュータ装置170を介して付着物捕捉装置150の吸引装置152を瞬間的に吐出作動させる。
【0046】
上記作動説明からも理解できるように、上記実施形態によれば、微小付着物剥離システム100は、ヘラ状に形成された剥離具140の先端部をシャーレSの底部表面に押し付けた状態で変位させることにより同表面と微小付着物Wとの間に剥離具140の先端部を挿し入れて微小付着物Wを同表面から剥がすことができる。そして、微小付着物剥離システム100は、シャーレSの底部表面から剥がした微小付着物Wをマイクロピペット152により捕捉することができる。これらにより、微小付着物剥離システム100は、シャーレSの底部表面に付着した大きさが1mm以下の微小付着物Wに大きな損傷を与えることなくかつ選択的に剥がすことができる。
【0047】
さらに、本発明の実施にあたっては、上記実施形態に限定されるものではなく、本発明の目的を逸脱しない限りにおいて種々の変更が可能である。なお、下記変形例の説明においては、参照する各図における上記実施形態と同様の構成部分に同じ符号または対応する符号を付すとともに直接関わらない部分については一部の構成を適宜省略して示して、それらの説明も省略する。
【0048】
例えば、上記実施形態においては、微小付着物剥離システム100は、シャーレS内の微小付着物Wを観察する顕微鏡110を落射照明型の倒立顕微鏡で構成した。しかし、顕微鏡110は、剥離対象となる微小付着物Wを拡大して観察できるものであれば、どのような形態の顕微鏡であってもよい。例えば、顕微鏡110としては、倒立顕微鏡や落射照明顕微鏡の他に、正立顕微鏡、位相差顕微鏡、微分干渉顕微鏡、蛍光顕微鏡、明視野照明顕微鏡および暗視野照明顕微鏡などの各種光学顕微鏡を用いることができる。この場合、光学顕微鏡による像をデジタル化して液晶ディスプレイなどの表示装置に表示する所謂バーチャル顕微鏡を顕微鏡110として用いることもできる。また、これらの光学顕微鏡の他に、透過型電子顕微鏡や走査型電子顕微鏡などの電子顕微鏡、X線顕微鏡および超音波顕微鏡を顕微鏡110として用いることもできる。なお、微小付着物Wが生体試料である場合には、光学顕微鏡を用いることにより微小付着物Wを生きた状態で観察して剥がすことができる。
【0049】
また、上記実施形態においては、微小付着物剥離システム100は、粗駆動変位装置131および微駆動変位装置132によって構成される剥離具変位装置130によって剥離具140を図示X軸方向、図示Y軸方向および図示Z軸方向に変位させるように構成した。すなわち、剥離具変位装置130が本発明に係る剥離具変位手段に相当する。しかし、剥離具変位装置130は、剥離具140を保持するとともに同剥離具140の挿込部141をシャーレSの底部表面に押し付けた状態で相対変位させることができる構成であれば、必ずしも上記実施形態に限定されるものではない。例えば、剥離具変位装置130は、顕微鏡110のステージ111を剥離具140に対して図示X軸方向、図示Y軸方向および図示Z軸方向に変位させるように構成してもよいし、粗駆動変位装置131または微駆動変位装置132のみによって構成するようにしてもよい。
【0050】
また、上記実施形態においては、微小付着物剥離システム100は、シャーレSの底部表面から剥がした微小付着物Wをマイクロピペット151で培養基Cとともに吸引して捕捉するように構成した。すなわち、マイクロピペット151および吸引装置152で構成される付着物捕捉装置150が本発明に係る付着物捕捉手段に相当する。しかし、付着物捕捉手段は、シャーレSの底部表面から剥がれた微小付着物Wを捕捉することができる構成であれば、必ずしも上記実施形態に限定されるものではない。例えば、付着物捕捉手段は、付着物捕捉装置150におけるマイクロピペット151内の圧力を手動操作によって変化させる構成、例えば、ゴム球や注射器を用いて構成することもできる。
【0051】
また、上記実施形態においては、マイクロピペット151の吸引口151aの径を微小付着物Wの大きさより大きく形成した。しかし、マイクロピペット151の吸引口151aの径を微小付着物Wの大きさより小径にしておくことにより、捕捉する微小付着物Wをマイクロピペット151の管内に進入させることなくマイクロピペット151の吸引口151aに保持した状態で捕捉することができる。さらに、また、付着物捕捉手段は、マイクロピペット151以外の構成、例えば、微小付着物Wを挟むピンセット、光の集光点で微小付着物Wを捕捉するレーザトラップ装置、または微小付着物Wが磁性を有する場合には永久磁石や電磁石などによって構成することもできる。また、上記実施形態において付着物捕捉手段を構成する付着物捕捉装置150は、剥離具変位装置130と同様な変位機構によって図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ電動で変位させるように構成することもできる。
【0052】
また、上記実施形態においては、微小付着物剥離システム100は、剥離具変位装置130をコントローラ160および外部コンピュータ装置170による作動制御によって駆動するように構成した。すなわち、コントローラ160および外部コンピュータ装置170が本発明に係る制御手段に相当する。しかし、制御手段は、剥離具変位装置130の作動を制御するように構成されていれば、必ずしも上記実施形態に限定されるものではない。例えば、制御手段を外部コンピュータ装置170のみによって構成することにより、外部コンピュータ装置170によって直接剥離具変位装置130の作動を制御するように構成することもできる。
【0053】
また、上記実施形態においては、微小付着物剥離システム100は、ユーザによる入力装置171の操作によって剥離具140を図示X軸方向および図示Y軸方向にそれぞれ変位させることにより微小付着物Wの剥離作業を手動操作によって行うように構成した。しかし、コントローラ160や外部コンピュータ装置170に予め剥離具140の変位パターンを記憶させておき、ユーザによる剥離作業開始の指示に従って自動で剥離具140を変位させて微小付着物Wを剥離させるように構成することもできる。例えば、シャーレSの底部に付着している微小付着物Wに対して、ユーザが剥離具140の挿込部141を押し付けた状態で所定の位置に位置決めした後、ユーザによる剥離作業開始の指示に従って外部コンピュータ装置170が剥離具変位装置130の作動を制御して剥離具140を図示X軸方向および/または図示Y軸方向にそれぞれ変位させて微小付着物Wを剥がすように構成することもできる。この場合、制御手段であるコントローラ160や外部コンピュータ装置170は、剥離具140を一方向に直線的変位させるようにしてもよいし、進行方向に対して前後方向および/または左右方向に往復変位を繰り返しながら、換言すれば、剥離具140を振動させながら変位させるようにしてもよい。
【0054】
なお、このような剥離具140の自動的な変位は、図示Z軸方向を含めて行なうようにすることもできることは当然である。すなわち、シャーレSの底部に付着している微小付着物Wに対して図示Z軸方向も含めた所定の位置にユーザが剥離具140を位置決めした後、ユーザによる剥離作業開始の指示に従って外部コンピュータ装置170が剥離具変位装置130の作動を制御して剥離具140を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させて微小付着物Wを剥がすように構成することもできる。
【0055】
また、上記実施形態においては、微小付着物剥離システム100は、微小付着物Wを剥がす作業を行う際、剥離具140に設けた歪みゲージ142からの検出信号を用いてコントローラ160による作動制御により剥離具140の撓み量(シャーレSの底部への押圧力)を一定に保つ押圧力のフィードバック制御を行うように構成した。これにより、剥離具140の挿込部141のシャーレSの底部表面への密着性の確保および剥離具140に過渡な押圧力が作用することによる剥離具140の破損を防止することができる。しかし、微小付着物Wを剥がす作業を行う際に、剥離具140の挿込部141のシャーレSの底部表面への密着性を確保でき剥離具140を破損させる懼れがない場合などには、剥離具140の図示Z軸方向の位置を固定した状態で微小付着物Wを剥がす作業を行うこともできる。これによれば、歪みゲージ142や剥離具140の撓み量(シャーレSの底部への押圧力)を一定に保つ制御が不要になり微小付着物剥離システム100の構成を簡単にすることができる。
【0056】
また、上記実施形態においては、微小付着物剥離システム100は、シャーレS内に収容された液状の培養基C内において微小付着物Wを剥がすように構成した。これは、上記実施形態における微小付着物Wが、培養した細胞であるためである。すなわち、微小付着物Wを剥がす作業は、流体内で行われるものであればよく、例えば、培養基C以外の液体、ゲル状やスラリー状の流動物内、または空気などのガス雰囲気内で行なうこともできる。また、この場合、流体は、流動し得る物質であり、微小付着物Wの剥離作業中において常に流れている状態であることを限定するものではない。
【0057】
また、このような流体中で微小付着物Wの剥離作業を行う場合、流体の全体または流体中における剥離対象となる微小付着物Wの周囲に微小付着物Wを剥離し易くする作用を発揮する所謂剥離剤を用いることもできる。例えば、上記実施形態においては、図4に示すように、剥離具140の近傍に剥離対象となる微小付着物Wに向けて(図示破線矢印参照)剥離剤(例えば、トリプシン)を吐出する吐出用マイクロピペット180を設けることができる。これによれば、剥離剤によってより精度良く微小付着物Wを剥がすことができる。なお、この場合、吐出用マイクロピペット180は、剥離具140の近傍に配置して同剥離具140とともに変位するように構成するとよい。
【0058】
また、上記実施形態においては、剥離具140は、平面視で略長方形状に形成されている。しかし、剥離具140は、シャーレS、すなわち、何らかの基材の表面に付着した微小付着物Wを剥がすことができるヘラ状に形成されていれば、大きさ、形状および素材は必ずしも上記実施形態に限定されるものではない。例えば、図5(a)に示すように挿込部141を斜め方向に延びるナイフ状に形成してもよいし、図5(b)に示すように挿込部141を円弧状に形成してもよいし、図5(c)に示すように挿込部141を先端部が尖った山形に形成してもよいし、図5(d)に示すように挿込部141を先端部が丸みを帯びた山形に形成してもよいし、図5(e)に示すように挿込部141を先端部が平らな山形に形成してもよいし、図5(f)に示すように挿込部141を先端部が2つの山形に形成してもよいし、図5(g)に示すように挿込部141を鋸刃状に形成してもよいし、図5(h)に示すように挿込部141を波形状に形成してもよい。
【0059】
また、図6(a)に示すように、剥離具140の挿込部141の表面に矢印線141aを設けることもできる。この矢印線141aは、微小付着物Wに対して剥離具140を位置決めする場合に挿込部141の中心位置を知るためのものであり、挿込部141の表面に直線状のキズを付けることにより形成されている。これによれば、ユーザは、剥離具140の位置決めや剥離具140による剥離作業を行い易くすることができる。
【0060】
また、図6(b)に示すように、剥離具140の表面上に目盛り141bを設けることもできる。この目盛り141bは、微小付着物Wの剥離作業を行う場合に微小付着物W自体の大きさや2つの微小付着物W間の距離などを測るためのものであり、挿込部141の表面に直線状のキズを付けることにより形成されている。このような目盛り141bが形成された剥離具140は、言わばナノ定規であり、ユーザは剥離具140の位置決めや剥離具140による剥離作業を行い易くすることができる。なお、図6(b)においては、目盛り141bは、剥離具140の挿込部141の幅方向に形成されているが、剥離具140の長手方向に沿って形成されていてもよいことは当然である。
【0061】
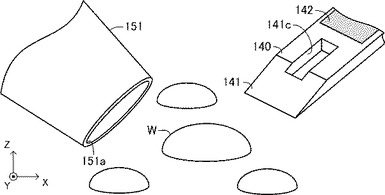
また、上記実施形態のおいては、剥離具140は、挿込部141の上面が先端側から長手方向に向って厚さが厚くなるように上方に向って傾斜して形成されている。これにより、挿込部141を微小付着物Wの底部に挿し込み易くしている。しかし、剥離具140は、全体に亘って均一な厚さで形成することもできる。また、剥離具140は、適当な位置に切欠きや貫通孔を設けることによりバネ定数を下げて撓み易くすることもできる。なお、図7には、剥離具140の略中央部に方形状の貫通孔141cを設けた剥離具140を示している。また、剥離具140における微小付着物Wの接触面(例えば、挿込部141)に微小付着物Wが貼り付くことを防止するためにフッ素樹脂(ポリテトラフルオロエチレン)などの各種樹脂材でコーティングしてもよい。また、剥離具140を透明な素材で構成することにより、倒立顕微鏡のように剥離具140の底面側から微小付着物Wを観察する場合においては、剥離具140上の微小付着物Wを観察し易くなる。
【0062】
また、上記実施形態においては、剥離具140は、平板状に形成されている。しかし、剥離具140は、図8(a)に示すように、底面が凸状に突出した形状に形成することもできる。これによれば、剥離具140は、図8(b),(c)に示すように、挿込部141をシャーレSの底部表面に押し付けた際、挿込部141の底部がシャーレSの底部表面に沿って変形して密着する。これにより、剥離具140の挿込部141を微小付着物Wの底部に同微小付着物Wを損傷することなく精度良く挿し込むことができる。
【0063】
また、このような剥離具140によれば、図8(a)〜(c)に示すように、剥離具140をシャーレSの底部表面に押し付ける量(押圧力)に応じて挿込部141がシャーレSの底部表面に密着する幅方向の長さを調整することができる。したがって、ユーザは、剥離具140をシャーレSの底部表面に押し付ける量(押圧力)を適宜調整することにより、シャーレSの底部表面に密着する挿込部141の幅を変化させることができ、剥離対象となる微小付着物Wの大きさ(幅方向の長さ)に応じた幅の剥離具140によって剥離作業を行うことができる。また、ユーザは、挿込部141上に微小付着物Wの一部を載せた状態で挿込部141の幅を狭めることにより微小付着物Wを挟むこともでき、微小付着物Wの剥がし方のバリエーションを増やすことができる。
【0064】
また、上記実施形態においては、微小付着物Wは、シャーレS内で培養した細胞とした。しかし、微小付着物Wは、細胞以外の細菌、酵母、原生動植物、菌類、藻類などの微生物であってもよく、これらの微生物は必ずしも生きている状態、すなわち生体試料でなくてもよい。また、微小付着物Wは、微生物以外の物質であってもよいことは当然である。したがって、微小付着物Wが付着する基材も必ずしもシャーレSである必要はない。すなわち、微小付着物Wは、基材の表面に付着した大きさが顕微鏡110で確認できる程度の大きさ、すなわち、概ね1mm以下の固体状または半固体状の物体や物質、換言すれば、顕微鏡110によって観察できる程度の大きさのものであればよい。
【0065】
また、上記実施形態においては、微小付着物Wが付着した基材をシャーレSとした。しかし、基材は、微小付着物Wが付着することができるとともに剥離具140による剥離作業が行える物体であれば、必ずしもシャーレSである必要はない。この場合、剥離具140による剥離作業が行える物体とは、微小付着物Wの剥離作業領域において、剥離具140の挿込部141が密着することができる平面または曲面を有する物体である。この場合、基材の表面は、必ずしも平滑である必要はなく、梨地状やエンボス状であってもよい。基材としては、例えば、ガラス材、金属材(貴金属や卑金属などを含む)、樹脂材、セラミック材(コンクリート、陶器または磁器など)、鉱物(岩石など)、木材またはゴム材を採用することができる。
【符号の説明】
【0066】
S…シャーレ、W…微小付着物、C…培養基、
100…微小付着物剥離システム、
110…顕微鏡、111…ステージ、112…ベース部、112a…支持部、113…光学系、113a…対物レンズ、113b…反射鏡、113c…接眼レンズ、114…照明部、
120…テーブル、
130…剥離具変位装置、131…粗駆動変位装置、132…微駆動変位装置、
140…剥離具、141…挿込部、141a…矢印線、141b…目盛り、141c…貫通孔、142…歪みゲージ、
150…付着物捕捉装置、151…マイクロピペット、151a…吸引口、152…吸引装置、
160…コントローラ、
170…外部コンピュータ装置、171…入力装置、172…表示装置、
180…吐出用マイクロピペット。
【技術分野】
【0001】
本発明は、基材の表面に付着した大きさが顕微鏡で観察可能な大きさの微小付着物、特には、流体中の基材の表面に付着した細胞や微生物などの生体試料を生きた状態で剥がすことができる微小付着物剥離システムおよび微小付着物剥離方法に関する。
【背景技術】
【0002】
従来から、医療分野においては、シャーレなどの培養器内の溶液中から単一の細胞、または数個の細胞を捕捉する場合、マイクロピペットが用いられている。マイクロピペットは、例えば、下記特許文献1,2に示すように、先端部が開口した長細い管体に形成されており、この管体内の圧力を下げることにより前記先端部から溶液中の細胞を1つずつ吸引して捕捉することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−152044号公報
【特許文献2】特開2009−34013号公報
【0004】
しかしながら、上記特許文献1,2に記載されたマイクロピペットにおいては、溶液中に漂動する細胞を捕捉することができるが、シャーレなどの基材の表面に付着した細胞を捕捉することができないという問題がある。例えば、医療分野においては、培養基で満たしたシャーレ内で細胞を培養すると、培養した細胞がシャーレの表面に付着するため、培養した細胞を傷つけることなく生きた状態でシャーレの表面から採取することが極めて困難である。また、シャーレ内に多数培養される細胞の中から特定の細胞を選択的に取り出すことも極めて困難であるという問題もあった。
【発明の概要】
【0005】
本発明は上記問題に対処するためなされたもので、その目的は、基材の表面に付着した大きさが1mm以下の微小付着物に大きな損傷を与えることなくかつ選択的に剥がすことができる微小付着物剥離システムを提供することにある。
【0006】
上記目的を達成するため、請求項1に記載した本発明の特徴は、基材の表面に付着した大きさが1mm以下の微小付着物を流体内で基材の表面から剥がすための微小付着物剥離システムであって、基材の表面に付着した微小付着物を拡大して観察するための顕微鏡と、ヘラ状に形成された剥離具を保持するとともに同剥離具の先端部を基材の表面に押し付けた状態で同剥離具を基材の表面上で相対変位させることができる剥離具変位手段と、基材から剥がされた微小付着物を捕捉するための付着物捕捉手段と、剥離具変位手段の作動を制御するための制御手段とを備えたことにある。この場合、微小付着物の大きさとは、微小付着物を平面視した場合における最も長い両端部間の長さである。そして、この微小付着物の大きさは、顕微鏡によって視認できる大きさであり概ね1mm以下の大きさである。
【0007】
このように構成した請求項1に記載した本発明の特徴によれば、微小付着物剥離システムは、ヘラ状に形成された剥離具の先端部を基材の表面に押し付けた状態で変位させることにより基材表面と微小付着物との間に剥離具の先端部を挿し入れて微小付着物を基材の表面から剥がすことができる。そして、微小付着物剥離システムは、基材表面から剥がした微小付着物を捕捉手段により捕捉することができる。これらにより、微小付着物剥離システムは、基材の表面に付着した大きさが1mm以下の微小付着物に大きな損傷を与えることなくかつ選択的に剥がすことができる。
【0008】
また、請求項2に記載した本発明の他の特徴は、前記微小付着物剥離システムにおいて、付着物捕捉手段は、基材の表面から剥がされた微小付着物を流体の吸引を介して捕捉することにある。
【0009】
このように構成した請求項2に係る本発明の他の特徴によれば、微小付着物剥離システムは、付着物捕捉手段が基材の表面から剥がされた微小付着物を流体の吸引を介して捕捉する。これにより、基材表面から剥がされた微小付着物を物理的な接触を避けて損傷することなく捕捉することができるとともに、捕捉した微小付着物を損傷することなく他の場所に移すこともできる。
【0010】
また、請求項3に記載した本発明の他の特徴は、前記微小付着物剥離システムにおいて、制御手段は、剥離具変位手段の作動を制御して剥離具を前記基材に押し付けた状態で同剥離具を基材と微小付着物との間に挿し入れて微小付着物を基材の表面から剥がすことにある。
【0011】
このように構成した請求項3に係る本発明の他の特徴によれば、微小付着物剥離システムは、制御手段が剥離具変位手段を制御することにより剥離具を基材と付着物との間に挿し入れて微小付着物を基材の表面から剥がす。これにより、ユーザは、制御手段に対して微小付着物の剥離作業を指示するだけで基材の表面から微小付着物を自動的に剥がすことができるため、容易に精度良く微小付着物を剥がすことができる。
【0012】
また、請求項4に記載した本発明の他の特徴は、前記微小付着物剥離システムにおいて、微小付着物は、生体試料であり、顕微鏡は、光学式顕微鏡であることにある。
【0013】
このように構成した請求項4に係る本発明の他の特徴によれば、微小付着物剥離システムは、微小付着物が生体試料であるとともに顕微鏡が光学式顕微鏡で構成されている。これにより、微小付着物剥離システムは、基材表面に付着した生体試料を生きた状態で基材表面から剥がすことができる。なお、この場合、生体試料とは、生きた状態の細菌、酵母、原生動植物、菌類、藻類などの微生物である。また、光学顕微鏡は、可視光線を利用した顕微鏡であり、例えば、正立顕微鏡、倒立顕微鏡、位相差顕微鏡、微分干渉顕微鏡、蛍光顕微鏡、明視野照明顕微鏡、暗視野照明顕微鏡および落射照明顕微鏡などがある。
【0014】
また、請求項5に記載した本発明の他の特徴は、前記微小付着物剥離システムにおいて、剥離具は、基材の表面に押し付けられた際の撓み変形量に応じた電気信号を出力する変形検出センサを備えており、制御部は、変形検出センサからの電気信号を用いて剥離具を所定の圧力で基材の表面に押し付けることにある。
【0015】
このように構成した請求項5に係る本発明の他の特徴によれば、微小付着物剥離システムは、剥離具が基材の表面に押し付けられた際の撓み変形量に応じた電気信号を出力する変形検出センサ(例えば、圧電素子)を備えているとともに、制御部が変形検出センサから電気信号を用いて剥離具を所定の圧力で基材の表面に押し付けるように構成されている。これにより、微小付着物剥離システムは、剥離具を正確な圧力で基材表面に押圧することができ、剥離具の基材表面への密着性を確保しつつ剥離具の損傷を防止しながら精度良く微小付着物を基材表面から剥がすことができる。
【0016】
また、請求項6に記載した本発明の他の特徴は、前記微小付着物剥離システムにおいて、剥離具は、先端部の幅が少なくとも微小付着物の幅よりも広いことにある。
【0017】
このように構成した請求項6に係る本発明の他の特徴によれば、微小付着物剥離システムは、剥離具における先端部の幅が少なくとも微小付着物の幅よりも広い幅で形成されている。これにより、微小付着物剥離システムは、剥離具の先端部を微小付着物の付着面全体に挿し入れることができ、精度良く微小付着物を基材表面から剥がすことができる。
【0018】
また、請求項7に記載した本発明の他の特徴は、前記微小付着物剥離システムにおいて、剥離具は、上面が先端部側から上方に向って傾斜して形成されていることにある。
【0019】
このように構成した請求項7に係る本発明の他の特徴によれば、微小付着物剥離システムは、剥離具における上面が先端部側から上方に向って傾斜して形成されている。これにより、微小付着物剥離システムは、剥離具の先端部を基材表面と微小付着物との間に挿し入れた際、効果的に微小付着物を基材表面から剥がすことができる。
【0020】
また、本発明は、微小付着物剥離システムとして実施できるばかりでなく、微小付着物剥離方法としても実施できるものである。
【0021】
具体的には、請求項8に示すように、基材の表面に付着した大きさが1mm以下の微小付着物を流体内で基材の表面から剥がすための微小付着物剥離方法であって、基材の表面に付着した微小付着物を拡大して観察するための顕微鏡と、ヘラ状に形成された剥離具を保持するとともに同剥離具の先端部を基材の表面に押し付けた状態で同剥離具を基材の表面上で相対変位させることができる剥離具変位手段と、基材から剥がされた微小付着物を捕捉するための付着物捕捉手段と、剥離具変位手段の作動を制御するための制御手段とを用意しておき、顕微鏡で基材の表面に付着した微小付着物の拡大像を観察しながら、制御手段を介して剥離具変位手段の作動を制御することにより、剥離具の先端部を基材の表面に押し付けた状態で相対変位させることによって微小付着物を基材から剥がし、基材から剥がされた微小付着物を付着物捕捉手段によって捕捉するようにする。これによれば、前記微小付着物剥離システムと同様な作用効果を期待することができる。
【図面の簡単な説明】
【0022】
【図1】本発明に係る微小付着物剥離システムのシステム構成を模式的に示した一部破断正面図である。
【図2】(a),(b)は図1に示した微小付着物剥離システムによって微小付着物を剥がす様子を模式的に示した斜視図であり、(a)は剥離具をシャーレの底部表面に押し付ける前の状態を示しており、(b)は剥離具をシャーレの底部表面に押し付けた状態を示している。
【図3】(a),(b)は図1に示した微小付着物剥離システムによって微小付着物を剥がす様子を模式的に示した斜視図であり、(b)は剥離具をシャーレの底部表面と微小付着物の底部との間に挿し込んだ状態を示しており、(b)は剥離した微小付着物をマイクロピペットで吸引する状態を示している。
【図4】本発明に係る変形例に係る微小付着物剥離システムによって微小付着物を剥がす様子を模式的に示した斜視図である。
【図5】(a)〜(h)は本発明に係る他の変形例に係る剥離具の挿込部の形状のバリエーションを模式的に示した剥離具の平面図である。
【図6】(a),(b)は本発明に係る他の変形例に係る剥離具の挿込部を模式的に示した剥離具の平面図であり、(a)は剥離具の挿込部にセンタリングなどに用いる矢印線を付した剥離具を示しており、(b)は剥離具の挿込部に大きさや距離は測るための目盛りを付した剥離具を示している。
【図7】本発明に係る他の変形例に係る剥離具によって微小付着物を剥がす様子を模式的に示した斜視図である。
【図8】本発明に係る他の変形例に係る剥離具によって微小付着物を剥がす様子を模式的に示した斜視図である。
【発明を実施するための形態】
【0023】
以下、本発明に係る微小付着物剥離システムの一実施形態について図面を参照しながら説明する。図1は、本発明に係る微小付着物剥離システム100のシステム構成を模式的に示した一部破断正面図である。なお、本明細書において参照する図は、本発明の理解を容易にするために一部の構成要素を誇張して表わすなど模式的に表している。このため、各構成要素間の寸法や比率などは異なっていることがある。この微小付着物剥離システム100は、シャーレS内の培養基C中で培養した生きた細胞からなる微小付着物WをシャーレSの底部表面から剥がすための機械装置群である。
【0024】
(微小付着物剥離システム100の構成)
微小付着物剥離システム100は、顕微鏡110を備えている。顕微鏡110は、シャーレS内で培養した微小付着物Wを拡大して観察するための装置であり、主として、ステージ111、ベース部112、光学系113および照明部114によって構成されている。ステージ111は、観察対象を載置するための載置台であり、金属板の中央部に透過性ガラスが嵌め込まれて構成されている。このステージ111は、図示しない変位機構によって互いに直交する3軸方向、具体的には、図示X軸方向(図示Y軸、Z軸に直交する図示左右方向)、図示Y軸方向(図示X軸、Z軸に直交する図示奥行き方向)および図示Z軸方向(シャーレSの底面に対して垂直方向)にそれぞれ変位するようにベース部112上に支持されている。
【0025】
ベース部112は、ステージ111を含む顕微鏡110の各構成要素を支持する基台であり、金属製の箱状に形成されている。このベース部112内には、ステージ111を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させる前記変位機構の他に光学系113が設けられている。光学系113は、ステージ111上に載置されたシャーレS内を観察するための光学器具の集まりであり、光を集中、反射および屈折させる複数の光学器具によって構成されている。具体的には、光学系113は、対物レンズ113a、反射鏡113bおよび接眼レンズ113cなどによって構成されている。これらのうち、対物レンズ113aは、ステージ111の下方にステージ111と対向して配置されている。また、反射鏡113bは、ベース部112内に配置されて対物レンズ113aを透過した光を接眼レンズ113cに導く。また、接眼レンズ113cは、ベース部112における図示左側上部に張り出した状態で設けられている。
【0026】
ステージ111の上方には照明部114が設けられている。照明部114は、ステージ111上に載置された観察対象物に対して光を照射するための光学装置であり、光を発する光源およびこの光源から発せられた光を観察対象物上に集光するコンデンサレンズ(図示せず)などによって構成されている。本実施形態においては、照明部114は、ハロゲンランプを光源として構成されている。すなわち、本実施形態における顕微鏡110は、落射照明型の倒立顕微鏡である。
【0027】
顕微鏡110のベース部112におけるステージ111を支持する円筒状の支持部112aの周囲には、テーブル120が設けられている。テーブル120は、顕微鏡110のステージ111の周辺に剥離具変位装置130および付着物捕捉装置150をそれぞれ配置するための支持台である。これらのうち、剥離具変位装置130は、後述する剥離具140を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させる機械装置であり、主として粗駆動変位装置131および微駆動変位装置132によって構成されている。
【0028】
粗駆動変位装置131は、微駆動変位装置132を支持しながらこの微駆動変位装置1132を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させる機械装置であり、後述するコントローラ160によって作動が制御される図示しないX軸方向アクチュエータ、Y軸方向アクチュエータおよびZ軸方向アクチュエータを備えて構成されている。この場合、これらのX軸方向アクチュエータ、Y軸方向アクチュエータおよびZ軸方向アクチュエータは、それぞれ粗駆動用の電動モータによって構成されており、微駆動変位装置132を各軸方向ごとに粗送り(mm/s)することができる。
【0029】
微駆動変位装置132は、剥離具140を保持しながらこの剥離具140を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させる機械装置であり、コントローラ160によって作動が制御される図示しないX軸方向アクチュエータ、Y軸方向アクチュエータおよびZ軸方向アクチュエータを備えて構成されている。この場合、これらのうち、X軸方向アクチュエータおよびY軸方向アクチュエータは、弾性ヒンジを利用した微駆動用の圧電素子(図示せず)によって構成されており、剥離具140を図示X軸方向および図示Y軸方向にそれぞれ精密送り(nm/s)することができる。また、Z軸方向アクチュエータは、積層型の圧電素子(図示せず)によって構成されており、剥離具140を図示Z軸方向に精密送り(nm/s)することができる。なお、本実施形態においては、剥離具変位装置130は、AFM(原子間力顕微鏡)においてカンチレバーを変位させるための変位装置を用いている。
【0030】
剥離具140は、シャーレSの底部に付着している微小付着物Wを剥がすためのヘラ状の部品であり、板状のシリコン材によって構成されている。この剥離具140は、平面視で略長方形状に形成されており、図2(a),(b)〜図3(a),(b)に示すように、一方(図示左側)の先端部に刃状の挿込部141が形成されるとともに他方の端部が微駆動変位装置132に着脱自在に保持されている。より具体的には、剥離具140は、剥離具140の図示下面が平面状に形成される一方で、挿込部141の上面が先端側から他方の端部側に向って厚さが厚くなるように上方に向って傾斜して形成されている。また、剥離具140の挿込部141の幅は、微小付着物Wの幅よりも広い幅に形成されている。本実施形態においては、剥離具140の挿込部141の幅は、約50μmに形成されている。
【0031】
この剥離具140における微駆動変位装置132に保持される側の上面には、フィルム状の歪みゲージ142が設けられている。歪みゲージ142は、剥離具140の撓み量に応じて抵抗値が変化する圧力センサである。この歪みゲージ142は、図示しない電気配線およびブリッジ回路を介してコントローラ160に接続されている。この場合、歪みゲージ142とコントローラ160とを繋ぐ電気配線の一部を構成するアルミニウム配線が、剥離具140を溶液中で使用した場合に電気化学反応により溶解して断線することがある。このため、剥離具140には、剥離具140の配線電位より正電位を印加して剥離具140の配線電位を還元電極するための白金からなる犠牲電極(図示せず)が設けられている。
【0032】
付着物捕捉装置150は、シャーレS内で剥がした微小付着物Wを吸引により捕捉するとともに吸引した微小付着物Wを吐出して開放する機械装置であり、主としてマイクロピペット151および吸引装置152によって構成されている。マイクロピペット151は、シャーレS内で剥がされた微小付着物Wを吸引して捕捉する器具であり、先端部が開口した長細い管状に形成されている。この場合、マイクロピペット151における先端部の開口した部分は、微小付着物Wをマイクロピペット151内に導入する吸引口151aであり、微小付着物Wの大きさより大きな径に形成されている。
【0033】
このマイクロピペット151は、他方の端部がシリコンチューブを介して吸引装置152に接続された状態で図示しない支持具によって顕微鏡110のステージ111上に図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ可動的に支持されている。一方、吸引装置152は、マイクロピペット151内の圧力を下げるまたは圧力を上げるためのポンプ装置であり、外部コンピュータ装置170によって作動が制御される。
【0034】
コントローラ160は、CPU、ROM、RAMなどからなるマイクロコンピュータによって構成されており、外部コンピュータ装置170からの指示に従って剥離具変位装置130の作動を制御する。より具体的には、コントローラ160は、外部コンピュータ装置170からの指示に従って粗駆動変位装置131および微駆動変位装置132の作動をそれぞれ制御する。また、コントローラ160は、外部コンピュータ装置170からの指示に従って微駆動変位装置132の作動を制御することにより、シャーレSの底部に押し付けられた剥離具140の撓み量を一定に保つ押圧力のフィードバック制御を実行する。具体的には、コントローラ140は、ユーザにより予め設定された撓み量または押圧力に関するパラメータと剥離具140に設けられた歪みゲージ142からの検出信号とを用いて微駆動変位装置132の作動を制御することにより、剥離具140を図示Z軸方向に変位させて撓み量を一定に保つ。
【0035】
外部コンピュータ装置170は、CPU、ROM、RAM、ハードディスクなどからなるマイクロコンピュータによって構成されており、キーボード、マウスおよびハプティックデバイスからなる入力装置171からの指示に従って、図示しない制御プログラムを実行することによりコントローラ160および付着物捕捉装置150の吸引装置152の作動をそれぞれ制御する。この場合、ハプティックデバイスは、ユーザが棒状の操作子を操作することによりユーザに対して力のフィードバックを与えることができる力覚フィードバックデバイスであり、本実施形態においては、剥離具140に加えられた力を感じることができる。また、外部コンピュータ装置170は、液晶ディスプレイからなる表示装置172を備えており、外部コンピュータ装置170の作動状態を適宜表示させる。すなわち、本実施形態において外部コンピュータ装置170は、個人向けパーソナルコンピュータ(所謂パソコン)を想定している。なお、外部コンピュータ装置170は、パソコンを想定しているが、前記各機能を実行できる形式のものであれば、他の形式のコンピュータであってもよいことは当然である。
【0036】
(微小付着物剥離システム100の作動)
次に、上記のように構成した微小付着物剥離システム100の作動について説明する。まず、ユーザは、微小付着物剥離システム100によって剥がす対象となる微小付着物Wが付着したシャーレSを用意する。本実施形態においては、ユーザは、ガラス製のシャーレS内に液体の培養基Cを入れた培地内で培養した大きさが略40μm程度の細胞を微小付着物Wとして用意する。この場合、シャーレS内には、複数の細胞が微小付着物Wとして存在している。
【0037】
次いで、ユーザは、用意したシャーレSを顕微鏡110のステージ111上にセットする。具体的には、ユーザは、シャーレSをステージ111上に固定的に配置した後、顕微鏡110の光源部114を点灯させた状態で接眼レンズ113cを覗きながら顕微鏡110の視野内に微小付着物Wが位置するようにステージ111の位置を調節する。
【0038】
次に、ユーザは、シャーレS内における微小付着物Wの近傍に剥離具140およびマイクロピペット151の吸引口151aを配置する。具体的には、ユーザは、外部コンピュータ装置170の入力装置171を操作することにより剥離具変位装置130を外部コンピュータ装置170の入力装置171によって駆動可能なモードに設定する。これにより、剥離具変位装置130を構成する粗駆動変位装置131および微駆動変位装置132は、ユーザによるハプティックデバイスやマウスなどの入力装置171の操作量に応じた駆動量で駆動する状態となる。
【0039】
次に、ユーザは、図2(a)に示すように、接眼レンズ113cを覗きながらハプティックデバイスやマウスなどの入力装置171を操作することにより剥離具140の位置を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させて剥離対象となる微小付着物Wの近傍に位置決めする。また、ユーザは、マイクロピペット151の吸引口151aがシャーレS内における剥離対象となる微小付着物Wの近傍に位置するようにマイクロピペット151の位置および姿勢を調整する。
【0040】
次に、ユーザは、剥離具140の挿込部141をシャーレSの底部表面に押し付けた状態とする。具体的には、ユーザは、図2(b)に示すように、前記と同様に接眼レンズ113cを覗きながら入力装置171を操作することにより剥離具140の位置を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させて微小付着物Wの近傍のシャーレSの底部表面に剥離具140の挿込部141を押し付ける。これにより、剥離具140は、挿込部141がシャーレSの底部表面に密着した状態で撓み変形する。次いで、ユーザは、入力装置171を操作することによりコントローラ160に対して剥離具140の撓み量を一定に保つ押圧力のフィードバック制御の実行の開始を指示する。
【0041】
この指示に応答して、コントローラ160は、剥離具140に設けられている歪みゲージ142からの検出信号を用いて微駆動変位装置132の作動を制御することにより、剥離具140の撓み量、換言すれば剥離具140のシャーレSの底部表面への押圧力を一定に保つ。なお、コントローラ160によるこの剥離具140の撓み量を一定に保つ押圧力のフィードバック制御の実行中においては、コントローラ160は、入力装置171による剥離具変位装置130に対する図示Z軸方向への駆動指令を無効とする。すなわち、剥離具140の撓み量を一定に保つ制御の実行中においては、ユーザは剥離具140を図示Z軸方向に変位させることができない。
【0042】
次に、ユーザは、微小付着物WをシャーレSの底部表面から剥離させる。具体的には、ユーザは、図3(a)に示すように、接眼レンズ113cを覗きながら入力装置171を操作することにより剥離具140の位置を図示X軸方向および図示Y軸方向にそれぞれ変位させて剥離具140の挿込部141をシャーレSの底部表面と微小付着物Wの底部との間に挿し入れる。この場合、ユーザは、入力装置171を操作することにより剥離具140の挿込部141をシャーレSの底部表面と微小付着物Wの底部との間に一方的に挿し込む(破線矢印参照)または同挿込部141をシャーレSの底部表面と微小付着物Wの底部との間に出し入れしながら微小付着物WをシャーレSの底部から剥がす。この微小付着物Wの剥がし作業の間、コントローラ160は、歪みゲージ142からの検出信号を用いて微駆動変位装置132の作動を制御して剥離具140の撓み量(剥離具140の押圧力)を一定に保つ。
【0043】
そして、ユーザは、図3(b)に示すように、顕微鏡110により微小付着物Wの状態を観察しながら微小付着物WがシャーレSの底部表面から離脱したことを確認した場合には、入力装置171を操作することにより外部コンピュータ装置170を介して付着物捕捉装置150の吸引装置152を作動させる。この場合、外部コンピュータ装置150は、極めて短い時間(1秒以内)だけ吸引装置152を作動させる。これにより、シャーレSの底部表面から離脱した微小付着物Wのみがマイクロピペット151の吸引口151aから培養基Cとともに吸引されて同マイクロピペット151内に捕捉される。
【0044】
次に、ユーザは、入力装置172を操作することによりコントローラ160に対して剥離具140の撓み量を一定に保つ押圧力のフィードバック制御の実行の中断を指示する。これにより、コントローラ160は、剥離具140の撓み量を一定に保つ制御の実行を中断する。次いで、ユーザは、接眼レンズ113cを覗きながら入力装置171を操作することにより剥離具140の位置を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させて剥離具140の挿込部141の位置をシャーレSの底部から離隔させる。これにより、微小付着物Wの剥離作業が終了する。
【0045】
なお、マイクロピペット151内に捕捉した微小付着物Wは、微小付着物Wの利用目的に応じてシャーレS内の別の場所またはシャーレS内とは異なるシャーレS外の場所、すなわち、微小付着物Wの利用目的に応じた場所でマイクロピペット151内から吐出されて利用される。この場合においても、ユーザは、入力装置171を操作することにより外部コンピュータ装置170を介して付着物捕捉装置150の吸引装置152を瞬間的に吐出作動させる。
【0046】
上記作動説明からも理解できるように、上記実施形態によれば、微小付着物剥離システム100は、ヘラ状に形成された剥離具140の先端部をシャーレSの底部表面に押し付けた状態で変位させることにより同表面と微小付着物Wとの間に剥離具140の先端部を挿し入れて微小付着物Wを同表面から剥がすことができる。そして、微小付着物剥離システム100は、シャーレSの底部表面から剥がした微小付着物Wをマイクロピペット152により捕捉することができる。これらにより、微小付着物剥離システム100は、シャーレSの底部表面に付着した大きさが1mm以下の微小付着物Wに大きな損傷を与えることなくかつ選択的に剥がすことができる。
【0047】
さらに、本発明の実施にあたっては、上記実施形態に限定されるものではなく、本発明の目的を逸脱しない限りにおいて種々の変更が可能である。なお、下記変形例の説明においては、参照する各図における上記実施形態と同様の構成部分に同じ符号または対応する符号を付すとともに直接関わらない部分については一部の構成を適宜省略して示して、それらの説明も省略する。
【0048】
例えば、上記実施形態においては、微小付着物剥離システム100は、シャーレS内の微小付着物Wを観察する顕微鏡110を落射照明型の倒立顕微鏡で構成した。しかし、顕微鏡110は、剥離対象となる微小付着物Wを拡大して観察できるものであれば、どのような形態の顕微鏡であってもよい。例えば、顕微鏡110としては、倒立顕微鏡や落射照明顕微鏡の他に、正立顕微鏡、位相差顕微鏡、微分干渉顕微鏡、蛍光顕微鏡、明視野照明顕微鏡および暗視野照明顕微鏡などの各種光学顕微鏡を用いることができる。この場合、光学顕微鏡による像をデジタル化して液晶ディスプレイなどの表示装置に表示する所謂バーチャル顕微鏡を顕微鏡110として用いることもできる。また、これらの光学顕微鏡の他に、透過型電子顕微鏡や走査型電子顕微鏡などの電子顕微鏡、X線顕微鏡および超音波顕微鏡を顕微鏡110として用いることもできる。なお、微小付着物Wが生体試料である場合には、光学顕微鏡を用いることにより微小付着物Wを生きた状態で観察して剥がすことができる。
【0049】
また、上記実施形態においては、微小付着物剥離システム100は、粗駆動変位装置131および微駆動変位装置132によって構成される剥離具変位装置130によって剥離具140を図示X軸方向、図示Y軸方向および図示Z軸方向に変位させるように構成した。すなわち、剥離具変位装置130が本発明に係る剥離具変位手段に相当する。しかし、剥離具変位装置130は、剥離具140を保持するとともに同剥離具140の挿込部141をシャーレSの底部表面に押し付けた状態で相対変位させることができる構成であれば、必ずしも上記実施形態に限定されるものではない。例えば、剥離具変位装置130は、顕微鏡110のステージ111を剥離具140に対して図示X軸方向、図示Y軸方向および図示Z軸方向に変位させるように構成してもよいし、粗駆動変位装置131または微駆動変位装置132のみによって構成するようにしてもよい。
【0050】
また、上記実施形態においては、微小付着物剥離システム100は、シャーレSの底部表面から剥がした微小付着物Wをマイクロピペット151で培養基Cとともに吸引して捕捉するように構成した。すなわち、マイクロピペット151および吸引装置152で構成される付着物捕捉装置150が本発明に係る付着物捕捉手段に相当する。しかし、付着物捕捉手段は、シャーレSの底部表面から剥がれた微小付着物Wを捕捉することができる構成であれば、必ずしも上記実施形態に限定されるものではない。例えば、付着物捕捉手段は、付着物捕捉装置150におけるマイクロピペット151内の圧力を手動操作によって変化させる構成、例えば、ゴム球や注射器を用いて構成することもできる。
【0051】
また、上記実施形態においては、マイクロピペット151の吸引口151aの径を微小付着物Wの大きさより大きく形成した。しかし、マイクロピペット151の吸引口151aの径を微小付着物Wの大きさより小径にしておくことにより、捕捉する微小付着物Wをマイクロピペット151の管内に進入させることなくマイクロピペット151の吸引口151aに保持した状態で捕捉することができる。さらに、また、付着物捕捉手段は、マイクロピペット151以外の構成、例えば、微小付着物Wを挟むピンセット、光の集光点で微小付着物Wを捕捉するレーザトラップ装置、または微小付着物Wが磁性を有する場合には永久磁石や電磁石などによって構成することもできる。また、上記実施形態において付着物捕捉手段を構成する付着物捕捉装置150は、剥離具変位装置130と同様な変位機構によって図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ電動で変位させるように構成することもできる。
【0052】
また、上記実施形態においては、微小付着物剥離システム100は、剥離具変位装置130をコントローラ160および外部コンピュータ装置170による作動制御によって駆動するように構成した。すなわち、コントローラ160および外部コンピュータ装置170が本発明に係る制御手段に相当する。しかし、制御手段は、剥離具変位装置130の作動を制御するように構成されていれば、必ずしも上記実施形態に限定されるものではない。例えば、制御手段を外部コンピュータ装置170のみによって構成することにより、外部コンピュータ装置170によって直接剥離具変位装置130の作動を制御するように構成することもできる。
【0053】
また、上記実施形態においては、微小付着物剥離システム100は、ユーザによる入力装置171の操作によって剥離具140を図示X軸方向および図示Y軸方向にそれぞれ変位させることにより微小付着物Wの剥離作業を手動操作によって行うように構成した。しかし、コントローラ160や外部コンピュータ装置170に予め剥離具140の変位パターンを記憶させておき、ユーザによる剥離作業開始の指示に従って自動で剥離具140を変位させて微小付着物Wを剥離させるように構成することもできる。例えば、シャーレSの底部に付着している微小付着物Wに対して、ユーザが剥離具140の挿込部141を押し付けた状態で所定の位置に位置決めした後、ユーザによる剥離作業開始の指示に従って外部コンピュータ装置170が剥離具変位装置130の作動を制御して剥離具140を図示X軸方向および/または図示Y軸方向にそれぞれ変位させて微小付着物Wを剥がすように構成することもできる。この場合、制御手段であるコントローラ160や外部コンピュータ装置170は、剥離具140を一方向に直線的変位させるようにしてもよいし、進行方向に対して前後方向および/または左右方向に往復変位を繰り返しながら、換言すれば、剥離具140を振動させながら変位させるようにしてもよい。
【0054】
なお、このような剥離具140の自動的な変位は、図示Z軸方向を含めて行なうようにすることもできることは当然である。すなわち、シャーレSの底部に付着している微小付着物Wに対して図示Z軸方向も含めた所定の位置にユーザが剥離具140を位置決めした後、ユーザによる剥離作業開始の指示に従って外部コンピュータ装置170が剥離具変位装置130の作動を制御して剥離具140を図示X軸方向、図示Y軸方向および図示Z軸方向にそれぞれ変位させて微小付着物Wを剥がすように構成することもできる。
【0055】
また、上記実施形態においては、微小付着物剥離システム100は、微小付着物Wを剥がす作業を行う際、剥離具140に設けた歪みゲージ142からの検出信号を用いてコントローラ160による作動制御により剥離具140の撓み量(シャーレSの底部への押圧力)を一定に保つ押圧力のフィードバック制御を行うように構成した。これにより、剥離具140の挿込部141のシャーレSの底部表面への密着性の確保および剥離具140に過渡な押圧力が作用することによる剥離具140の破損を防止することができる。しかし、微小付着物Wを剥がす作業を行う際に、剥離具140の挿込部141のシャーレSの底部表面への密着性を確保でき剥離具140を破損させる懼れがない場合などには、剥離具140の図示Z軸方向の位置を固定した状態で微小付着物Wを剥がす作業を行うこともできる。これによれば、歪みゲージ142や剥離具140の撓み量(シャーレSの底部への押圧力)を一定に保つ制御が不要になり微小付着物剥離システム100の構成を簡単にすることができる。
【0056】
また、上記実施形態においては、微小付着物剥離システム100は、シャーレS内に収容された液状の培養基C内において微小付着物Wを剥がすように構成した。これは、上記実施形態における微小付着物Wが、培養した細胞であるためである。すなわち、微小付着物Wを剥がす作業は、流体内で行われるものであればよく、例えば、培養基C以外の液体、ゲル状やスラリー状の流動物内、または空気などのガス雰囲気内で行なうこともできる。また、この場合、流体は、流動し得る物質であり、微小付着物Wの剥離作業中において常に流れている状態であることを限定するものではない。
【0057】
また、このような流体中で微小付着物Wの剥離作業を行う場合、流体の全体または流体中における剥離対象となる微小付着物Wの周囲に微小付着物Wを剥離し易くする作用を発揮する所謂剥離剤を用いることもできる。例えば、上記実施形態においては、図4に示すように、剥離具140の近傍に剥離対象となる微小付着物Wに向けて(図示破線矢印参照)剥離剤(例えば、トリプシン)を吐出する吐出用マイクロピペット180を設けることができる。これによれば、剥離剤によってより精度良く微小付着物Wを剥がすことができる。なお、この場合、吐出用マイクロピペット180は、剥離具140の近傍に配置して同剥離具140とともに変位するように構成するとよい。
【0058】
また、上記実施形態においては、剥離具140は、平面視で略長方形状に形成されている。しかし、剥離具140は、シャーレS、すなわち、何らかの基材の表面に付着した微小付着物Wを剥がすことができるヘラ状に形成されていれば、大きさ、形状および素材は必ずしも上記実施形態に限定されるものではない。例えば、図5(a)に示すように挿込部141を斜め方向に延びるナイフ状に形成してもよいし、図5(b)に示すように挿込部141を円弧状に形成してもよいし、図5(c)に示すように挿込部141を先端部が尖った山形に形成してもよいし、図5(d)に示すように挿込部141を先端部が丸みを帯びた山形に形成してもよいし、図5(e)に示すように挿込部141を先端部が平らな山形に形成してもよいし、図5(f)に示すように挿込部141を先端部が2つの山形に形成してもよいし、図5(g)に示すように挿込部141を鋸刃状に形成してもよいし、図5(h)に示すように挿込部141を波形状に形成してもよい。
【0059】
また、図6(a)に示すように、剥離具140の挿込部141の表面に矢印線141aを設けることもできる。この矢印線141aは、微小付着物Wに対して剥離具140を位置決めする場合に挿込部141の中心位置を知るためのものであり、挿込部141の表面に直線状のキズを付けることにより形成されている。これによれば、ユーザは、剥離具140の位置決めや剥離具140による剥離作業を行い易くすることができる。
【0060】
また、図6(b)に示すように、剥離具140の表面上に目盛り141bを設けることもできる。この目盛り141bは、微小付着物Wの剥離作業を行う場合に微小付着物W自体の大きさや2つの微小付着物W間の距離などを測るためのものであり、挿込部141の表面に直線状のキズを付けることにより形成されている。このような目盛り141bが形成された剥離具140は、言わばナノ定規であり、ユーザは剥離具140の位置決めや剥離具140による剥離作業を行い易くすることができる。なお、図6(b)においては、目盛り141bは、剥離具140の挿込部141の幅方向に形成されているが、剥離具140の長手方向に沿って形成されていてもよいことは当然である。
【0061】
また、上記実施形態のおいては、剥離具140は、挿込部141の上面が先端側から長手方向に向って厚さが厚くなるように上方に向って傾斜して形成されている。これにより、挿込部141を微小付着物Wの底部に挿し込み易くしている。しかし、剥離具140は、全体に亘って均一な厚さで形成することもできる。また、剥離具140は、適当な位置に切欠きや貫通孔を設けることによりバネ定数を下げて撓み易くすることもできる。なお、図7には、剥離具140の略中央部に方形状の貫通孔141cを設けた剥離具140を示している。また、剥離具140における微小付着物Wの接触面(例えば、挿込部141)に微小付着物Wが貼り付くことを防止するためにフッ素樹脂(ポリテトラフルオロエチレン)などの各種樹脂材でコーティングしてもよい。また、剥離具140を透明な素材で構成することにより、倒立顕微鏡のように剥離具140の底面側から微小付着物Wを観察する場合においては、剥離具140上の微小付着物Wを観察し易くなる。
【0062】
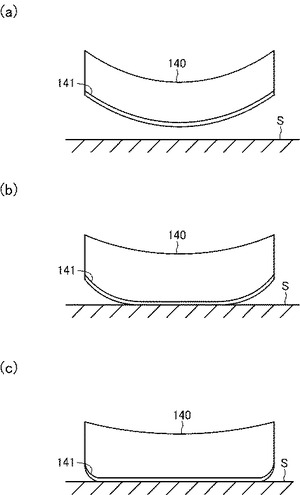
また、上記実施形態においては、剥離具140は、平板状に形成されている。しかし、剥離具140は、図8(a)に示すように、底面が凸状に突出した形状に形成することもできる。これによれば、剥離具140は、図8(b),(c)に示すように、挿込部141をシャーレSの底部表面に押し付けた際、挿込部141の底部がシャーレSの底部表面に沿って変形して密着する。これにより、剥離具140の挿込部141を微小付着物Wの底部に同微小付着物Wを損傷することなく精度良く挿し込むことができる。
【0063】
また、このような剥離具140によれば、図8(a)〜(c)に示すように、剥離具140をシャーレSの底部表面に押し付ける量(押圧力)に応じて挿込部141がシャーレSの底部表面に密着する幅方向の長さを調整することができる。したがって、ユーザは、剥離具140をシャーレSの底部表面に押し付ける量(押圧力)を適宜調整することにより、シャーレSの底部表面に密着する挿込部141の幅を変化させることができ、剥離対象となる微小付着物Wの大きさ(幅方向の長さ)に応じた幅の剥離具140によって剥離作業を行うことができる。また、ユーザは、挿込部141上に微小付着物Wの一部を載せた状態で挿込部141の幅を狭めることにより微小付着物Wを挟むこともでき、微小付着物Wの剥がし方のバリエーションを増やすことができる。
【0064】
また、上記実施形態においては、微小付着物Wは、シャーレS内で培養した細胞とした。しかし、微小付着物Wは、細胞以外の細菌、酵母、原生動植物、菌類、藻類などの微生物であってもよく、これらの微生物は必ずしも生きている状態、すなわち生体試料でなくてもよい。また、微小付着物Wは、微生物以外の物質であってもよいことは当然である。したがって、微小付着物Wが付着する基材も必ずしもシャーレSである必要はない。すなわち、微小付着物Wは、基材の表面に付着した大きさが顕微鏡110で確認できる程度の大きさ、すなわち、概ね1mm以下の固体状または半固体状の物体や物質、換言すれば、顕微鏡110によって観察できる程度の大きさのものであればよい。
【0065】
また、上記実施形態においては、微小付着物Wが付着した基材をシャーレSとした。しかし、基材は、微小付着物Wが付着することができるとともに剥離具140による剥離作業が行える物体であれば、必ずしもシャーレSである必要はない。この場合、剥離具140による剥離作業が行える物体とは、微小付着物Wの剥離作業領域において、剥離具140の挿込部141が密着することができる平面または曲面を有する物体である。この場合、基材の表面は、必ずしも平滑である必要はなく、梨地状やエンボス状であってもよい。基材としては、例えば、ガラス材、金属材(貴金属や卑金属などを含む)、樹脂材、セラミック材(コンクリート、陶器または磁器など)、鉱物(岩石など)、木材またはゴム材を採用することができる。
【符号の説明】
【0066】
S…シャーレ、W…微小付着物、C…培養基、
100…微小付着物剥離システム、
110…顕微鏡、111…ステージ、112…ベース部、112a…支持部、113…光学系、113a…対物レンズ、113b…反射鏡、113c…接眼レンズ、114…照明部、
120…テーブル、
130…剥離具変位装置、131…粗駆動変位装置、132…微駆動変位装置、
140…剥離具、141…挿込部、141a…矢印線、141b…目盛り、141c…貫通孔、142…歪みゲージ、
150…付着物捕捉装置、151…マイクロピペット、151a…吸引口、152…吸引装置、
160…コントローラ、
170…外部コンピュータ装置、171…入力装置、172…表示装置、
180…吐出用マイクロピペット。
【特許請求の範囲】
【請求項1】
基材の表面に付着した大きさが1mm以下の微小付着物を流体内で前記基材の表面から剥がすための微小付着物剥離システムであって、
前記基材の表面に付着した前記微小付着物を拡大して観察するための顕微鏡と、
ヘラ状に形成された剥離具を保持するとともに同剥離具の先端部を前記基材の表面に押し付けた状態で同剥離具を前記基材の表面上で相対変位させることができる剥離具変位手段と、
前記基材から剥がされた前記微小付着物を捕捉するための付着物捕捉手段と、
前記剥離具変位手段の作動を制御するための制御手段とを備えたことを特徴とする微小付着物剥離システム。
【請求項2】
請求項1に記載した微小付着物剥離システムにおいて、
前記付着物捕捉手段は、前記基材の表面から剥がされた前記微小付着物を前記流体の吸引を介して捕捉することを特徴とする微小付着物剥離システム。
【請求項3】
請求項1または請求項2に記載した微小付着物剥離システムにおいて、
前記制御手段は、
前記剥離具変位手段の作動を制御して前記剥離具を前記基材に押し付けた状態で同剥離具を前記基材と前記微小付着物との間に挿し入れて前記微小付着物を前記基材の表面から剥がすことを特徴とする微小付着物剥離システム。
【請求項4】
請求項1ないし請求項3のうちのいずれか1つに記載した微小付着物剥離システムにおいて、
前記微小付着物は、生体試料であり、
前記顕微鏡は、光学式顕微鏡であることを特徴とする微小付着物剥離システム。
【請求項5】
請求項1ないし請求項4のうちのいずれか1つに記載した微小付着物剥離システムにおいて、
前記剥離具は、前記基材の表面に押し付けられた際の撓み変形量に応じた電気信号を出力する変形検出センサを備えており、
前記制御部は、前記変形検出センサからの前記電気信号を用いて前記剥離具を所定の圧力で前記基材の表面に押し付けることを特徴とする微小付着物剥離システム。
【請求項6】
請求項1ないし請求項5のうちのいずれか1つに記載した微小付着物剥離システムにおいて、
前記剥離具は、先端部の幅が少なくとも前記微小付着物の幅よりも広いことを特徴とする微小付着物剥離システム。
【請求項7】
請求項1ないし請求項6のうちのいずれか1つに記載した微小付着物剥離システムにおいて、
前記剥離具は、上面が先端部側から上方に向って傾斜して形成されていることを特徴とする微小付着物剥離システム。
【請求項8】
基材の表面に付着した大きさが1mm以下の微小付着物を流体内で前記基材の表面から剥がすための微小付着物剥離方法であって、
前記基材の表面に付着した前記微小付着物を拡大して観察するための顕微鏡と、
ヘラ状に形成された剥離具を保持するとともに同剥離具の先端部を前記基材の表面に押し付けた状態で同剥離具を前記基材の表面上で相対変位させることができる剥離具変位手段と、
前記基材から剥がされた前記微小付着物を捕捉するための付着物捕捉手段と、
前記剥離具変位手段の作動を制御するための制御手段とを用意しておき、
前記顕微鏡で前記基材の表面に付着した前記微小付着物の拡大像を観察しながら、
前記制御手段を介して前記剥離具変位手段の作動を制御することにより、前記剥離具の先端部を前記基材の表面に押し付けた状態で相対変位させることによって前記微小付着物を前記基材から剥がし、
前記基材から剥がされた前記微小付着物を前記付着物捕捉手段によって捕捉するようにしたことを特徴とする微小付着物剥離方法。
【請求項1】
基材の表面に付着した大きさが1mm以下の微小付着物を流体内で前記基材の表面から剥がすための微小付着物剥離システムであって、
前記基材の表面に付着した前記微小付着物を拡大して観察するための顕微鏡と、
ヘラ状に形成された剥離具を保持するとともに同剥離具の先端部を前記基材の表面に押し付けた状態で同剥離具を前記基材の表面上で相対変位させることができる剥離具変位手段と、
前記基材から剥がされた前記微小付着物を捕捉するための付着物捕捉手段と、
前記剥離具変位手段の作動を制御するための制御手段とを備えたことを特徴とする微小付着物剥離システム。
【請求項2】
請求項1に記載した微小付着物剥離システムにおいて、
前記付着物捕捉手段は、前記基材の表面から剥がされた前記微小付着物を前記流体の吸引を介して捕捉することを特徴とする微小付着物剥離システム。
【請求項3】
請求項1または請求項2に記載した微小付着物剥離システムにおいて、
前記制御手段は、
前記剥離具変位手段の作動を制御して前記剥離具を前記基材に押し付けた状態で同剥離具を前記基材と前記微小付着物との間に挿し入れて前記微小付着物を前記基材の表面から剥がすことを特徴とする微小付着物剥離システム。
【請求項4】
請求項1ないし請求項3のうちのいずれか1つに記載した微小付着物剥離システムにおいて、
前記微小付着物は、生体試料であり、
前記顕微鏡は、光学式顕微鏡であることを特徴とする微小付着物剥離システム。
【請求項5】
請求項1ないし請求項4のうちのいずれか1つに記載した微小付着物剥離システムにおいて、
前記剥離具は、前記基材の表面に押し付けられた際の撓み変形量に応じた電気信号を出力する変形検出センサを備えており、
前記制御部は、前記変形検出センサからの前記電気信号を用いて前記剥離具を所定の圧力で前記基材の表面に押し付けることを特徴とする微小付着物剥離システム。
【請求項6】
請求項1ないし請求項5のうちのいずれか1つに記載した微小付着物剥離システムにおいて、
前記剥離具は、先端部の幅が少なくとも前記微小付着物の幅よりも広いことを特徴とする微小付着物剥離システム。
【請求項7】
請求項1ないし請求項6のうちのいずれか1つに記載した微小付着物剥離システムにおいて、
前記剥離具は、上面が先端部側から上方に向って傾斜して形成されていることを特徴とする微小付着物剥離システム。
【請求項8】
基材の表面に付着した大きさが1mm以下の微小付着物を流体内で前記基材の表面から剥がすための微小付着物剥離方法であって、
前記基材の表面に付着した前記微小付着物を拡大して観察するための顕微鏡と、
ヘラ状に形成された剥離具を保持するとともに同剥離具の先端部を前記基材の表面に押し付けた状態で同剥離具を前記基材の表面上で相対変位させることができる剥離具変位手段と、
前記基材から剥がされた前記微小付着物を捕捉するための付着物捕捉手段と、
前記剥離具変位手段の作動を制御するための制御手段とを用意しておき、
前記顕微鏡で前記基材の表面に付着した前記微小付着物の拡大像を観察しながら、
前記制御手段を介して前記剥離具変位手段の作動を制御することにより、前記剥離具の先端部を前記基材の表面に押し付けた状態で相対変位させることによって前記微小付着物を前記基材から剥がし、
前記基材から剥がされた前記微小付着物を前記付着物捕捉手段によって捕捉するようにしたことを特徴とする微小付着物剥離方法。
【図1】



【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−50665(P2013−50665A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−189801(P2011−189801)
【出願日】平成23年8月31日(2011.8.31)
【出願人】(304023318)国立大学法人静岡大学 (416)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月31日(2011.8.31)
【出願人】(304023318)国立大学法人静岡大学 (416)
【Fターム(参考)】
[ Back to top ]