
昇降コンベヤシステム

【課題】搬入又は搬出コンベヤからの搬送駆動力により昇降コンベヤを搬送駆動することにより昇降コンベヤの駆動部材を省いて昇降コンベヤを小型化及び軽量化すると共にコンベヤシステムの消費電力を低減する。
【解決手段】昇降コンベヤ(7)が下方位置へ移動停止された際には、第1回動軸(79)の回動に伴って作動する第1作動部材(85)により第1連結部材(45)及び第1駆動力付与手段(19)を連結して搬入コンベヤ(3)の搬送駆動力により昇降コンベヤ(7)を搬送駆動可能にする一方、昇降コンベヤ(7)が上方位置へ移動停止された際には、第2回動軸(87)の回動に伴って作動する第2作動部材(93)により第2連結部材(47)及び第2駆動力付与手段(31)を連結して搬出コンベヤ(5)の搬送駆動力により昇降コンベヤ(7)を搬送駆動可能にする。
【解決手段】昇降コンベヤ(7)が下方位置へ移動停止された際には、第1回動軸(79)の回動に伴って作動する第1作動部材(85)により第1連結部材(45)及び第1駆動力付与手段(19)を連結して搬入コンベヤ(3)の搬送駆動力により昇降コンベヤ(7)を搬送駆動可能にする一方、昇降コンベヤ(7)が上方位置へ移動停止された際には、第2回動軸(87)の回動に伴って作動する第2作動部材(93)により第2連結部材(47)及び第2駆動力付与手段(31)を連結して搬出コンベヤ(5)の搬送駆動力により昇降コンベヤ(7)を搬送駆動可能にする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、高低差を設けて製品を搬送する昇降コンベヤシステム、詳しくは高低差を設けた搬入コンベヤ及び搬出コンベヤ間に配置されて昇降する昇降コンベヤを上記搬入コンベヤ及び搬出コンベヤの少なくともいずれからの搬送駆動力により搬送駆動して製品の移載を可能にする昇降コンベヤシステムに関する。
【背景技術】
【0002】
例えば特許文献1の図4に示すように高低差を設けて配置された搬入側コンベヤと搬出側コンベヤの間にコンテナ、1個分の搬送長さを搬送駆動する昇降コンベヤと、該昇降コンベヤを昇降駆動するコンテナリフターを配置し、搬入側コンベヤ及び昇降コンベヤの搬送駆動により搬送されるコンテナを昇降コンベヤ上へ移載した後、該昇降コンベヤを上昇して搬出コンベヤへ接続し、昇降コンベヤ及び搬出コンベヤを搬送駆動して昇降コンベヤ上のコンテナを搬出コンベヤへ搬出することにより高低差を設けて製品を搬送する昇降コンベヤシステムが開示されている。
【0003】
上記昇降コンベヤシステムは、搬入コンベヤからのコンテナの移載を可能にすると共に搬出コンベヤに対するコンテナの移載を可能にするため、昇降コンベヤに電動モータを搭載し搬送駆動可能な構造にする必要がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−118832号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
解決しようとする問題点は、搬入及び搬出コンベヤ間に配置される昇降コンベヤに電動モータを搭載して搬送駆動可能な構造にする必要があり、昇降コンベヤが重量化及び大型化すると共に消費電力が増大する点にある。
【課題を解決するための手段】
【0006】
本発明は、搬入コンベヤと、該搬入コンベヤに対して高低差を設けて配置される搬出コンベヤと、上記搬入コンベヤ及び搬出コンベヤ間に配置され、それぞれのコンベヤに一致するように昇降される昇降コンベヤからなる昇降搬送システムにおいて、上記搬入コンベヤ及び搬出コンベヤにそれぞれ設けられ、昇降コンベヤに対して各コンベヤの搬送駆動力をそれぞれ付与する第1及び第2駆動力付与手段と、昇降コンベヤの搬入側及び搬出側において搬送直交方向に軸線を有して回転可能に軸支された回転軸の軸端部にそれぞれ設けられ、対応する駆動力付与手段に連結可能な第1及び第2連結部材とを備えると共に昇降コンベヤには、該昇降コンベヤが下方及び上方のいずれか一方の位置に停止した際に搬入コンベヤ側において回動可能に軸支された第1回動軸を回動する第1回動部材と、上記昇降コンベヤが下方及び上方のいずれか他方の位置に停止した際に搬出コンベヤ側において回動可能に軸支された第2回動軸を回動する第2回動部材と、第1回動部材または第2回動部材の回動に伴って対応する回転軸及び駆動力付与手段のいずれか一方を移動して相互を連結する第1及び第2作動部材とを備え、上記昇降コンベヤが下方位置へ移動停止された際には、第1回動軸の回動に伴って作動する第1作動部材により第1連結部材及び第1駆動力付与手段を連結して搬入コンベヤの搬送駆動力により昇降コンベヤを搬送駆動可能にする一方、昇降コンベヤが上方位置へ移動停止された際には、第2回動軸の回動に伴って作動する第2作動部材により第2連結部材及び第2駆動力付与手段を連結して搬出コンベヤの搬送駆動力により昇降コンベヤを搬送駆動可能にすることを最も主要な特徴とする。
【発明の効果】
【0007】
本発明は、搬入又は搬出コンベヤからの搬送駆動力により昇降コンベヤを搬送駆動することにより昇降コンベヤの駆動部材を省いて昇降コンベヤを小型化及び軽量化すると共にコンベヤシステムの消費電力を低減することができる。
【図面の簡単な説明】
【0008】
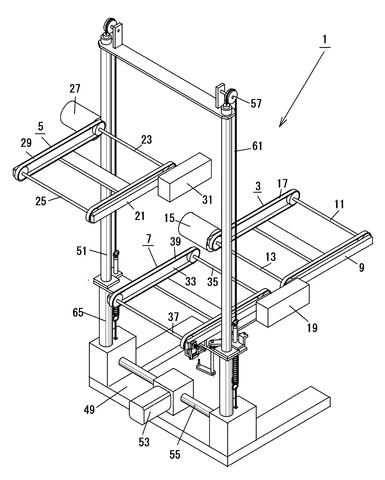
【図1】昇降コンベヤシステムの概略を示す略体斜視図である。
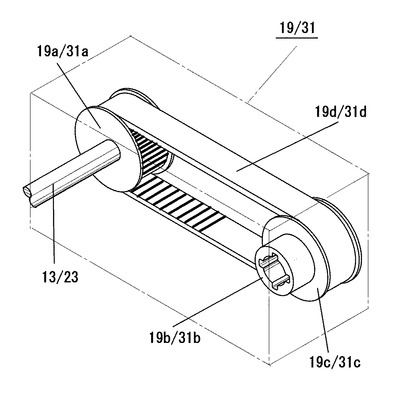
【図2】搬入コンベヤの第1駆動力付与手段を示す説明図である。
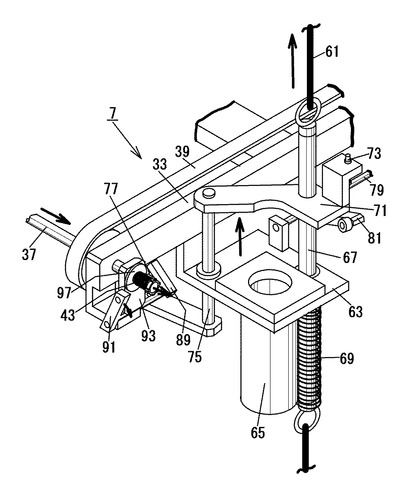
【図3】昇降コンベヤの正面側を拡大して示す略体斜視図である。
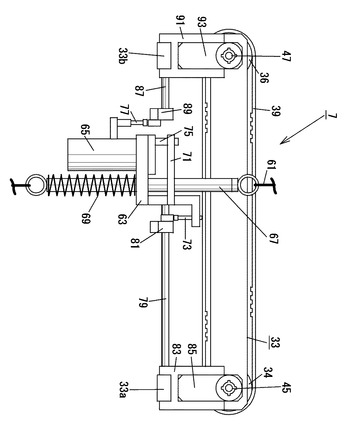
【図4】昇降コンベヤの回転軸移動機構を示す説明図である。
【図5】昇降コンベヤの搬入側回転軸の移動作用を示す説明図である。
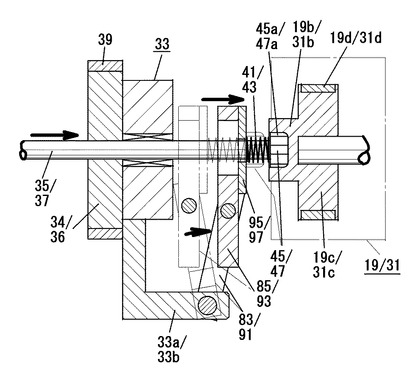
【図6】第1駆動力付与手段に対する第1連結部材の連結状態を示す説明図である。
【図7】昇降コンベヤの搬出側回転軸の移動作用を示す一部破断説明図である。
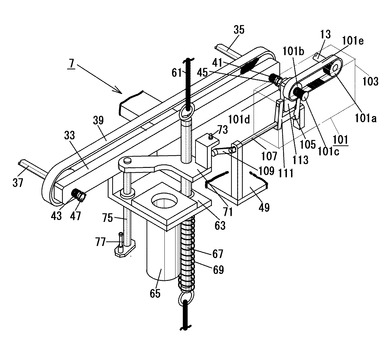
【図8】実施例2に係る第1駆動力付与手段のスライド軸移動機構を示す説明図である。
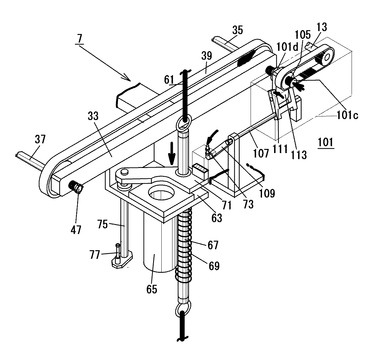
【図9】実施例2に係る第2駆動力付与手段のスライド軸移動機構を示す説明図である。
【図10】第1駆動力付与手段のスライド軸移動作用を示す説明図である。
【図11】第2駆動力付与手段のスライド軸移動作用を示す説明図である。
【発明を実施するための形態】
【0009】
昇降コンベヤが下方位置へ移動停止された際には、第1回動軸の回動に伴って作動する第1作動部材により第1連結部材及び第1駆動力付与手段を連結して搬入コンベヤの搬送駆動力により昇降コンベヤを搬送駆動可能にする一方、昇降コンベヤが上方位置へ移動停止された際には、第2回動軸の回動に伴って作動する第2作動部材により第2連結部材及び第2駆動力付与手段を連結して搬出コンベヤの搬送駆動力により昇降コンベヤを搬送駆動可能にすることを最良の実施形態とする。
【実施例1】
【0010】
以下、実施例を示す図に従って本発明を説明する。
図1乃至図4に示すように、昇降コンベヤシステム1は搬入側コンベヤ3と、該搬入側コンベヤ3に対して適宜の高さを設けて配置される搬出側コンベヤ5と、上記搬入側コンベヤ3の搬出側端部と搬出側コンベヤ5の搬入側端部の間に配置される昇降コンベヤ7により構成される。
【0011】
上記搬入側コンベヤ3は少なくとも搬送される製品の搬送方向長さの搬送長で、該製品の少なくとも搬送直交方向幅に応じた間隔をおいて相対して固定される一対の支持フレーム9と、該支持フレーム9の搬入側及び搬出側にてそれぞれ回転可能に軸支される回転軸11・13と、上記回転軸11・13(図は搬出側の回転軸13に連結された例を示す。)のいずれか一方の軸端部に連結される数値制御可能なサーボモータ等の電動モータ15と、各回転軸11・13の軸線方向端部にそれぞれ固定された歯付きプーリ等の回転体(図示せず)にそれぞれ掛渡される歯付きベルト等の搬送ベルト17から構成される。
【0012】
また、上記搬入側コンベヤ3の搬出側に位置する回転軸13の一方軸端部には第1駆動力付与手段19が連結される。該第1駆動力付与手段19は、上記回転軸13の一方軸端部に連結されて回転可能に軸支される歯付きプーリ等の回転体19aと、後述する昇降コンベヤ7における搬入側の側方に応じた位置にて回転可能に軸支され、中心部に連結ボス19bが設けられた歯付きプーリ等の回転体19cと、これら回転体19a・19cに掛渡される歯付きベルト等の駆動ベルト19dにより構成される。上記連結ボス19bは中心部に形成された連結凹部の内周面に複数の被係合凹部が周方向へ等間隔で軸線方向へ延出するように形成される。
【0013】
上記搬出側コンベヤ5は上記した搬入側コンベヤ3と同様の構造で、少なくとも搬送される製品の搬送方向長さの搬送長で、該製品の少なくとも搬送直交方向幅に応じた間隔をおいて相対して固定される一対の支持フレーム21と、該支持フレーム21の搬入側及び搬出側にてそれぞれ回転可能に軸支される回転軸23・25と、上記回転軸23・25のいずれか一方(図は搬入側の回転軸23に連結された例を示す。)の軸端部に連結される数値制御可能なサーボモータ等の電動モータ27と、各回転軸23・25の軸線方向端部にそれぞれ固定された歯付きプーリ等の回転体(図示せず)にそれぞれ掛渡される歯付きベルト等の搬送ベルト29から構成される。
【0014】
また、上記搬出側コンベヤ5の搬入側に位置する回転軸23の一方軸端部には第2駆動力付与手段31が連結される。該第2駆動力付与手段31は上記の第1駆動力付与手段19と同様で、上記回転軸23の一方軸端部に連結されて回転可能に軸支される歯付きプーリ等の回転体31aと、後述する昇降コンベヤ7における搬出側の側方に応じた位置にて回転可能に軸支され、中心部に連結ボス31bが設けられた歯付きプーリ等の回転体31cと、これら回転体31a・31cに掛渡される歯付きベルト等の駆動ベルト31dにより構成される。上記連結ボス31bは中心部に形成された連結凹部の内周面に複数の被係合凹部が周方向へ等間隔で軸線方向へ延出するように形成される。
【0015】
なお、上記したように搬出コンベヤ5及び第2駆動力付与手段31は、搬入コンベヤ3及び第1駆動力付与手段19と同一であるため、搬入コンベヤ3及び第1駆動力付与手段19を示す図2に搬出コンベヤ5及び第2駆動力付与手段31の符号を付して図示を省略する。
【0016】
上記昇降コンベヤ7のコンベヤ構造は、基本的には上記の搬入側コンベヤ3及び搬出側コンベヤ5と同様で、少なくとも搬送される製品の搬送方向長さの搬送長で、該製品の少なくとも搬送直交方向幅に応じた間隔をおいて相対して固定された一対の支持フレーム33と、該支持フレーム33の搬入側及び搬出側にてそれぞれ回転可能で、軸線方向へスライド可能に軸支された回転軸35・37と、各回転軸35・37の軸線方向端部にそれぞれ固定された歯付きプーリ等の回転体34・36にそれぞれ掛渡される歯付きベルト等の搬送ベルト39から構成される。
【0017】
各支持フレーム33から外側へ突出する各回転軸35・37の両軸端部には圧縮ばね等の弾性部材41・43がそれぞれ装着され、各弾性部材41・43の弾性力により各支持フレーム33に対して対応する回転軸35・37が中立位置、即ち支持フレーム33から外側へ突出する各回転軸35・37の軸端部の長さが等しくなるように付勢される。
【0018】
また、回転軸35の一方軸端部(図示する手前側)には対応する第1駆動力付与手段19の連結ボス19bに挿嵌して連結する第1連結部材45が、また回転軸37の一方軸端部(図示する手前側)には対応する第2駆動力付与手段31の連結ボス31bに挿嵌して連結する第2連結部材47がそれぞれ設けられる。各第1及び第2連結部材45・47は対応する連結ボス19b・31bに挿嵌する大きさの円盤状で、外周面に対応する被係合凹部に係合する係合突部45a・47aが形成される。
【0019】
上記昇降コンベヤ7は上記搬入側コンベヤ3の搬入側端部と搬出コンベヤ5の搬入側端部に至る高さの昇降フレーム49に対して昇降可能に支持される。該昇降フレーム49には搬入側コンベヤ3及び搬出コンベヤ5の高低差に応じた上下長さで、昇降コンベヤ7の搬送直交方向幅より若干広い間隔をおいて相対する一対の上下フレーム51(本例は上下フレーム51をパイプで構成した例を示す。)が立設される。各上下フレーム51の下部には搬送直交方向に軸線を有し、数値制御可能なサーボモータ等の電動モータ53に連結された回転軸55が回転可能に軸支され、電動モータ53の駆動により上記回転軸55が正逆方向へ回転される。
【0020】
なお、昇降フレーム49の下方位置及び上方位置にはストッパ(図示せず)が昇降コンベヤ7に当接して移動を規制するようにそれぞれ設けられ、昇降コンベヤ7が昇降フレーム49の下方位置へ移動された際には更に下方へ、また上方位置へ移動された際には更に上方へ移動するのを規制する。
【0021】
上記回転軸55の各軸端部及び各上下フレーム51の上端部には回転体57(図は上端部に取付けられる回転体のみを示し、回転軸55に取付けられる回転体に付いては、図示を省略する。)がそれぞれ回転可能に軸支され、各回転体57間には金属ワイヤやベルト等の上下走行部材61が後述するように掛渡される。
【0022】
また、昇降コンベヤ7の各支持フレーム33下部には搬送直交方向の外側へ突出する取付け板63がそれぞれ設けられ、各取付け板63には上下方向に軸線を有した中空状の軸受部材65がそれぞれ設けられる。そして各上下フレーム51にはそれぞれの軸受部材65が上下方向へ摺動するようにそれぞれ支持され、各上下フレーム51に対して昇降コンベヤ7が各軸受部材65を介して昇降するように支持される。
【0023】
また、各取付け板63には上下方向に軸線を有し、第1連結部材45を連結ボス19bに、また第2連結部材47を連結ボス31bにそれぞれ連結させる際の回転軸35・37の移動距離に対応する軸線長さで、第1回動部材の一部を構成する上下スライド軸67が上下方向へ摺動可能で、かつ抜け止めされた状態でそれぞれ軸支される。各取付け板63の下面側に位置する上下スライド軸67には圧縮ばね等の弾性部材69がそれぞれ設けられる。また、各上下スライド軸67の上部及び下部にはそれぞれの上下走行部材61が緊張状態で取付けられる。
【0024】
上記取付け板63から上方へ突出する上下スライド軸67には作動板71が取付けられる。該作動板67の搬入側には回転軸35を軸線方向へ移動する際に後述する第1回動軸79を回動させる第1回動部材の一部を構成する第1ロッド73の基端部が固定される。また、作動板71の搬出側には上下方向に軸線を有して取付け板63に形成された貫通孔63a内を挿通して取付け板63の下面側に至る取付けロッド75の基端部が固定され、該取付けロッド75の下端部には回転軸37を軸線方向へ移動する際に第2回動軸87を回動する第2回動部材の一部を構成するための第2ロッド77の基端部が固定される。
【0025】
上記取付け板63及び昇降コンベヤ7における支持フレーム33の搬入側下部にて外側へ水平に突出した軸支板33aには搬送方向に軸線を有した第1回動軸79の各軸端部が回動可能に軸支され、第1ロッド73側の第1回動軸79端部には第1回動部材の一部を構成する揺動アーム81の基端部が固定される。また、搬入側の第1回動軸79端部には揺動アーム83の基端部が固定され、該揺動アーム83の先端部には支持フレーム33の搬入側と上記弾性部材41の間に位置する回転軸35に遊嵌する切欠き部85aを有した第1作動部材としての第1作動板85が回動可能に軸支される。
【0026】
また、取付け板63及び昇降コンベヤ7における支持フレーム33の搬出側下部にて外側へ水平に突出した軸支板33bには搬送方向に軸線を有した第2回動軸87の軸端部が回動可能に軸支され、第2ロッド77側の第2回動軸87端部には第2回動部材の一部を構成する揺動アーム89の基端部が固定される。また、搬出側の第2回動軸87端部には揺動アーム91の基端部が固定され、該揺動アーム91の先端部には支持フレーム33の搬出側と上記弾性部材43の間に位置する回転軸37に遊嵌する切欠き部93aを有した第2作動部材としての第2作動板93が回動可能に軸支される。
【0027】
なお、図中の符号95は弾性部材41及び第1作動板85の間の回転軸35に挿通される座金、符号97は弾性部材43及び第2作動板93の間の回転軸37に挿通される座金である。
【0028】
次に、上記のように構成された昇降搬送システム1による搬送作用を説明する。
先ず、上記昇降搬送システム1による製品の昇降搬送作用の概略を説明すると、昇降コンベヤ7が昇降フレーム49の下方位置へ移動された際に、搬入コンベヤ3の第1駆動力付与手段19に対して昇降コンベヤ7における回転軸35に設けられた第1連結部材45が連結される。該状態にて搬入コンベヤ3の電動モータ15が駆動されると、搬出側の回転軸13の回転に伴って搬送ベルト17を走行させると共に第1駆動力付与手段19に連結された第1連結部材45を介して回転軸13の回転力を昇降コンベヤ7の回転軸35へ伝達して搬送ベルト39を搬入コンベヤ3と一致する方向へ搬送走行させる。
【0029】
上記状態にて製品が搬入コンベヤ3の搬送ベルト17上に載置されると、該製品は搬入コンベヤ3の搬出側へ搬送された後に昇降コンベヤ7上に移載される。そして製品の搬送方向下手側端部が昇降コンベヤ7の搬出側に位置するように搬送されると、該昇降コンベヤ7の搬出側に設けられた図示しない製品検出器からの信号に基づいて上記電動モータ15の駆動を停止して搬入コンベヤ3における搬送ベルト17及び昇降コンベヤ7における搬送ベルト39の走行を停止させる。
【0030】
上記電動モータ15の駆動が停止したタイミング又は若干遅延したタイミングで電動モータ53を駆動して上下走行部材61を走行させて上下フレーム51に対して昇降コンベヤ7を上方へ移動し、該昇降コンベヤ7が所定の上方位置へ移動した後に若干遅延したタイミングで上記電動モータ53の駆動を停止して搬出コンベヤ5に接続させると共に昇降コンベヤ7における搬出側の回転軸37に設けられた第2連結部材47を第2駆動力付与手段31に連結させる。
【0031】
昇降コンベヤ7の第2連結部材47が第2駆動力付与手段31に連結されたタイミングで電動モータ27を駆動すると、搬入側の回転軸23を回転して搬出コンベヤ5の搬送ベルト29を図示する実線矢印方向へ走行させると共に第2駆動力付与手段31に連結された第2連結部材47を介して回転軸37を回転して昇降コンベヤ7の搬送ベルト39を搬出コンベヤ5と一致する方向へ走行させて昇降コンベヤ7上の製品を搬出コンベヤ5上へ移載して搬出させる。
【0032】
次に、昇降コンベヤ7が下方位置へ移動した際に第1駆動力付与手段19に第1連結部材45を連結する作用を説明すると、電動モータ53の駆動により昇降コンベヤ7が上下フレーム51を摺動しながら搬入コンベヤ3に一致する昇降フレーム49の下方位置へ移動して停止される。この状態にて昇降コンベヤ7における回転軸35の一方端部に設けられた第1連結部材45は第1駆動力付与手段19の連結ボス19bに対して回転軸35の移動距離に対応する間隔をおいて相対される。
【0033】
そして昇降フレーム49が下方位置に停止した状態で電動モータ53の駆動を継続して上下走行部材61を更に下方向へ走行させると、停止した昇降コンベヤ7の取付け板63に対して電動モータ53の継続駆動により走行する上下走行部材61により上下スライド軸67が取付け板63に対して下方向へ移動される。
【0034】
上下スライド軸67が下方向へ移動されると、該上下スライド軸67と一体に移動する作動板71に設けられた第1ロッド73の下端部を揺動アーム81の先端部に当接して揺動させることにより第1回動軸79を揺動アーム81の揺動角に対応して回動させる。
【0035】
第1回動軸79の回動により揺動アーム83を上記所定の角度で揺動して回転軸35の軸端部において第1作動板85が軸線方向外側へ移動されると、弾性部材41を弾性変形させながら回転軸35を軸線方向外側へ移動して第1連結部材45を第1駆動力付与手段19における連結ボス19b内へ突入して係合突部45aを被係合凹部に係合して連結させる。(図5及び図6参照)
【0036】
上記状態にて電動モータ15が駆動されて搬入コンベヤ3が搬送駆動されると、第1駆動力付与手段19に連結された第1連結部材45を介して電動モータ15の駆動力を回転軸35に伝達して昇降コンベヤ7を搬入コンベヤ3と同期して搬送駆動させる。
【0037】
次に、昇降コンベヤ7が上方位置へ移動した際に第2駆動力付与手段31に第2連結部材47を連結する作用を説明すると、電動モータ53の駆動により昇降コンベヤ7が上下フレーム51を摺動しながら搬出コンベヤ5に一致する昇降フレーム49の上方位置へ移動して停止される。この状態にて昇降コンベヤ7における回転軸37の一方端部に設けられた第2連結部材47は第2駆動力付与手段31の連結ボス31bに対して回転軸37の移動距離に対応する間隔をおいて相対される。
【0038】
そして昇降フレーム49が下方位置に停止した状態で電動モータ53の駆動を継続して上下走行部材61を更に上方向へ走行させると、停止した昇降コンベヤ7の取付け板63に対して電動モータ53の継続駆動により走行する上下走行部材61により上下スライド軸67が取付け板63に対して上方向へ移動される。
【0039】
上下スライド軸67が上方向へ移動されると、該上下スライド軸67と一体に移動する作動板71に設けられた取付けロッド75を上方へ移動して第2ロッド77の上端部を揺動アーム89の先端部に当接して揺動させることにより第2回動軸87を揺動アーム89の揺動角に対応して回動させる。
【0040】
第2回動軸87の回動により揺動アーム91を上記所定の角度で揺動して回転軸37の軸端部において第2作動板87が軸線方向外側へ移動されると、弾性部材43を弾性変形させながら回転軸37を軸線方向外側へ移動して第2連結部材47を第2駆動力付与手段31における連結ボス31b内へ突入して係合突部47aを被係合凹部に係合して連結させる。(図7参照)
【0041】
なお、上記した第2駆動力付与手段31の連結ボス31bに対する第2連結部材47の連結状態に付いては、第1駆動力付与手段19の連結ボス19bに対する第1連結部材45の連結と同様であるため、図6に第2駆動力付与手段31の連結ボス31bに第2連結部材47を連結する際の部材の符号を付して図示を省略する。
【0042】
上記状態にて電動モータ27が駆動されて搬出コンベヤ5が搬送駆動されると、第2駆動力付与手段31に連結された第2連結部材47を介して電動モータ27の駆動力を回転軸37へ伝達して昇降コンベヤ7を搬出コンベヤ5と同期して搬送駆動させる。
【0043】
本実施例は昇降コンベヤ7が昇降フレーム49の下方位置へ移動された際には、搬入コンベヤ3における電動モータ15の駆動力により、また昇降コンベヤ7が昇降フレーム49の上方位置へ移動された際には、搬出コンベヤ5における電動モータ27の駆動力により昇降コンベヤ7を搬入コンベヤ3、搬出コンベヤ5に同期して搬送駆動して製品を搬送することができ、昇降コンベヤ7の電動モータを省くことにより昇降コンベヤ7自体を小型化及び軽量化することができる。
【0044】
また、第1駆動力付与手段19に対して第1連結部材45を、また第2駆動力付与手段31に対して第2連結部材47をそれぞれ連結する際には、昇降フレーム49の下方位置又は上方位置に昇降コンベヤ7を停止させた後に回転軸35・37を軸線方向へ移動して連結させるため、上記連結を確実に行うことができる。
【実施例2】
【0045】
実施例1は、昇降コンベヤ7が下方位置へ移動した際には回転軸35を第1駆動力付与手段19側へ、また上方位置へ移動した際には回転軸37を第2駆動力付与手段31側へそれぞれ移動して駆動連結する構成としたが、本実施例2は昇降コンベヤ7が下方位置へ移動した際には第1駆動力付与手段19の連結ボス19bを回転軸35側へ、また上方位置へ移動した際には第2駆動力付与手段31の連結ボス31bを回転軸37側へそれぞれ移動して駆動連結することを特徴とする。
【0046】
図8に示すように第1駆動力付与手段101はケース103内に回転軸13の一方軸端部に連結されて回転可能に軸支された歯付きプーリ等の一方の回転体101a及び昇降コンベヤ7の回転軸35に対して適宜の間隔をおいて回転可能に軸支された歯付きプーリ等の他方の回転体101bと、該他方の回転体101bの中心部にて回転軸35に至るストロークで軸線方向へ摺動可能で、かつ回り止めされて軸支されるスライド軸101cと、回転軸35に相対する軸部材としてのスライド軸101cの軸端部に設けられる連結ボス101dと、上記各回転体101a・101bに掛渡される歯付きベルト等の駆動ベルト101eから構成される。そして上記回転軸35の軸端部に対する連結ボス101dの相対面側には内周面に溝を有し、第2連結部材47が挿嵌される係合凹部(図示せず)が形成される。
【0047】
なお、他方の回転体101bにおいて連結ボス101dの反対側へ突出するスライド軸101cの軸端部と他方の回転体101b間には圧縮ばね等の弾性部材105が装着され、該弾性部材105の弾性力により上記スライド軸101cを連結ボス101dの反対側へ付勢する。
【0048】
一方、昇降コンベヤ7の下方移動位置に対応する昇降フレーム49及び第1駆動力付与手段101におけるスライド軸101cに応じたケース103には第1回動軸107の各軸端部が回動可能に軸支される。上記取付け板63側の第1回動軸107の軸端部には先端部が第1ロッド73に当接可能な第1回動部材の一部を構成する揺動アーム109の基端部が固定される。また、第1駆動力付与手段101側の第1回動軸107の軸端部には先端部が連結ボス101d側に位置し、正面コ字形からなる揺動アーム111の基端部が固定される。そして上記揺動アーム111には他方の回転体101bと連結ボス101d間のスライド軸101cに遊嵌される第1作動部材としての第1作動板113が回動可能に軸支される。
【0049】
図9に示すように第2駆動力付与手段115はケース117内に回転軸23の一方軸端部に連結されて回転可能に軸支された歯付きプーリ等の一方の回転体115a及び昇降コンベヤ7の回転軸37に対して適宜の間隔をおいて回転可能に軸支された歯付きプーリ等の他方の回転体115bと、該他方の回転体115bの中心部にて回転軸37に至るストロークで軸線方向へ摺動可能で、かつ回り止めされて軸支されるスライド軸115cと、回転軸37に相対する軸部材としてのスライド軸115cの軸端部に固定される連結ボス115dと、上記各回転体115a・115bに掛渡される歯付きベルト等の駆動ベルト115eから構成される。そして上記回転軸37の軸端部に対する連結ボス115dの相対面側には内周面に溝を有し、第2連結部材47が挿嵌される係合凹部(図示せず)が形成される。
【0050】
なお、他方の回転体115bにおいて連結ボス115dの反対側へ突出するスライド軸115cの軸端部と他方の回転体115b間には圧縮ばね等の弾性部材119が装着され、該弾性部材119の弾性力により上記スライド軸115cを連結ボス115dの反対側へ付勢する。
【0051】
一方、昇降コンベヤ7の上方移動位置に対応する昇降フレーム49及び第2駆動力付与手段115におけるスライド軸115cに応じたケース117には第2回動軸121の各軸端部が回動可能に軸支される。上記取付け板63側の第2回動軸121の軸端部には先端部が第2ロッド77に当接可能な第2回動部材の一部を構成する揺動アーム123の基端部が固定される。また、第2駆動力付与手段115側の第2回動軸121の軸端部には先端部が連結ボス115d側に位置し、正面コ字形の揺動アーム125の基端部が固定される。そして上記揺動アーム125には他方の回転体115bと連結ボス115d間のスライド軸115cに遊嵌される第2作動部材としての第2作動板127が回動可能に軸支される。
なお、実施例1と同一の部材に付いては、同一の符号を付して詳細な説明を省略する。
【0052】
次に、上記のように構成された第1駆動力付与手段101に対する第1連結部材45及び第2駆動力付与手段115に対する第2連結部材47の連結作用を説明する。
先ず、第1駆動力付与手段101に対する第1連結部材45の連結作用を説明すると、電動モータ53の駆動により昇降コンベヤ7が上下フレーム51を摺動しながら搬入コンベヤ3に一致する昇降フレーム49の下方位置へ移動して停止される。この状態にて第1駆動力付与手段101の連結ボス101dは昇降コンベヤ7における回転軸35の一方端部に対してスライド軸101cの移動距離に応じた間隔をおいて離間している。
【0053】
そして昇降フレーム49が下方位置に停止した状態で電動モータ53の駆動を継続して上下走行部材61を更に下方向へ走行させると、停止した昇降コンベヤ7の取付け板63に対して電動モータ53の継続駆動により走行する上下走行部材61により上下スライド軸67が取付け板63に対して下方向へ移動される。
【0054】
上下スライド軸67が下方向へ移動されると、該上下スライド軸67と一体に移動する作動板71に設けられた第1ロッド73の下端部に当接する揺動アーム109が揺動して第1回動軸107を揺動アーム109の揺動角に応じて回動させる。
【0055】
第1回動軸107の回動により他方の揺動アーム111を上記所定の角度で揺動し、第1作動板113が軸線方向内側へ移動される。これによりスライド軸101cは弾性部材105の弾性力に抗して移動して第1連結部材45を連結ボス101dに挿嵌して連結させる。(図10参照)
【0056】
上記状態にて電動モータ15が駆動されて搬入コンベヤ3が搬送駆動されると、第1駆動力付与手段101に連結された第1連結部材45を介して昇降コンベヤ7の回転軸35を回転して昇降コンベヤ7を搬入コンベヤ3と同期して搬送駆動させる。
【0057】
次に、昇降コンベヤ7が上方位置へ移動した際に第2駆動力付与手段115に第2連結部材47を連結する作用を説明すると、電動モータ53の駆動により昇降コンベヤ7が上下フレーム51を摺動しながら搬出コンベヤ5に一致する昇降フレーム49の上方位置へ移動して停止される。この状態にて第2駆動力付与手段115の連結ボス115dは昇降コンベヤ7における回転軸37の一方端部に対してスライド軸115cの移動距離に応じた間隔をおいて離間している。
【0058】
そして昇降フレーム49が上方位置に停止した状態で電動モータ53の駆動を継続して上下走行部材61を更に上方向へ走行させると、停止した昇降コンベヤ7の取付け板63に対して電動モータ53の継続駆動により走行する上下走行部材61により上下スライド軸67が取付け板63に対して上方向へ移動される。
【0059】
上方向に対する上下スライド軸67の移動に伴って作動板71に設けられた第2ロッド77の上端部に当接する揺動アーム123が揺動して第2回動軸121を揺動アーム123の揺動角に応じて回動させる。
【0060】
第2回動軸121の回動により他方の揺動アーム125を上記所定の角度で揺動し、第2作動板127を軸線方向内側へ移動される。これによりスライド軸115cは弾性部材119の弾性力に抗して移動して第2連結部材47を連結ボス115dに挿嵌して連結させる。(図11参照)
【0061】
上記状態にて電動モータ27が駆動されて搬出コンベヤ5が搬送駆動されると、第2駆動力付与手段115に連結された第2連結部材47を介して昇降コンベヤ7の回転軸37を回転して昇降コンベヤ7を搬出コンベヤ5と同期して搬送駆動させる。
【0062】
上記説明は、下方に配置された搬入コンベヤ3に載置された製品を該搬入コンベヤに対して所要の高さを設けて上方に配置された搬出コンベヤまで持ち上げて搬送する態様により説明したが、上方に配置された搬入コンベヤに載置された製品を該搬入コンベヤに対して所要の高さを設けて下方に配置された搬出コンベヤまで下降して搬送する態様として実施してもよい。
【符号の説明】
【0063】
1 昇降コンベヤシステム
3 搬入側コンベヤ
5 搬出側コンベヤ
7 昇降コンベヤ
9 支持フレーム
11 回転軸
13 回転軸
15 電動モータ
17 搬送ベルト
19 第1駆動力付与手段
19a 回転体
19b 連結ボス
19c 回転体
19d 駆動ベルト
21 支持フレーム
23 回転軸
25 回転軸
27 電動モータ
29 搬送ベルト
31 第2駆動力付与手段
31a 回転体
31b 連結ボス
31c 回転体
31d 駆動ベルト
33 支持フレーム
33a 軸支板
33b 軸支板
34 回転体
35 回転軸
36 回転体
37 回転軸
39 搬送ベルト
41 弾性部材
43 弾性部材
45 第1連結部材
45a 係合突部
47 第2連結部材
47a 係合突部
49 昇降フレーム
51 上下フレーム
53 電動モータ
55 回転軸
57 回転体
61 上下走行部材
63 取付け板
63a 貫通孔
65 軸受部材
67 上下スライド軸
69 弾性部材
71 作動板
73 第1回動部材の一部を構成する第1ロッド
75 取付けロッド
77 第2回動部材の一部を構成する第2ロッド
79 第1回動軸
81 第1回動部材の一部を構成する揺動アーム
83 揺動アーム
85 第1作動部材としての第1作動板
87 第2回動軸
89 第2回動部材の一部を構成する揺動アーム
91 揺動アーム
93 第2作動部材としての第2作動板
95 座金盤
97 座金盤
101 第1駆動力付与手段
101a 回転体
101b 回転体
101c 軸部材としてのスライド軸
101d 連結ボス
101e 駆動ベルト
103 ケース
105 弾性部材
107 第1回動軸
109 第1回動部材の一部を構成する揺動アーム
111 揺動アーム
113 第1作動部材としての第1作動板
115 第2駆動力付与手段
115a 回転体
115b 回転体
115c 軸部材としてのスライド軸
115d 連結ボス
115e 駆動ベルト
117 ケース
119 弾性部材
121 第2回動軸
123 第2回動部材の一部を構成する揺動アーム
125 揺動アーム
127 第2作動部材としての第2作動板
【技術分野】
【0001】
本発明は、高低差を設けて製品を搬送する昇降コンベヤシステム、詳しくは高低差を設けた搬入コンベヤ及び搬出コンベヤ間に配置されて昇降する昇降コンベヤを上記搬入コンベヤ及び搬出コンベヤの少なくともいずれからの搬送駆動力により搬送駆動して製品の移載を可能にする昇降コンベヤシステムに関する。
【背景技術】
【0002】
例えば特許文献1の図4に示すように高低差を設けて配置された搬入側コンベヤと搬出側コンベヤの間にコンテナ、1個分の搬送長さを搬送駆動する昇降コンベヤと、該昇降コンベヤを昇降駆動するコンテナリフターを配置し、搬入側コンベヤ及び昇降コンベヤの搬送駆動により搬送されるコンテナを昇降コンベヤ上へ移載した後、該昇降コンベヤを上昇して搬出コンベヤへ接続し、昇降コンベヤ及び搬出コンベヤを搬送駆動して昇降コンベヤ上のコンテナを搬出コンベヤへ搬出することにより高低差を設けて製品を搬送する昇降コンベヤシステムが開示されている。
【0003】
上記昇降コンベヤシステムは、搬入コンベヤからのコンテナの移載を可能にすると共に搬出コンベヤに対するコンテナの移載を可能にするため、昇降コンベヤに電動モータを搭載し搬送駆動可能な構造にする必要がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−118832号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
解決しようとする問題点は、搬入及び搬出コンベヤ間に配置される昇降コンベヤに電動モータを搭載して搬送駆動可能な構造にする必要があり、昇降コンベヤが重量化及び大型化すると共に消費電力が増大する点にある。
【課題を解決するための手段】
【0006】
本発明は、搬入コンベヤと、該搬入コンベヤに対して高低差を設けて配置される搬出コンベヤと、上記搬入コンベヤ及び搬出コンベヤ間に配置され、それぞれのコンベヤに一致するように昇降される昇降コンベヤからなる昇降搬送システムにおいて、上記搬入コンベヤ及び搬出コンベヤにそれぞれ設けられ、昇降コンベヤに対して各コンベヤの搬送駆動力をそれぞれ付与する第1及び第2駆動力付与手段と、昇降コンベヤの搬入側及び搬出側において搬送直交方向に軸線を有して回転可能に軸支された回転軸の軸端部にそれぞれ設けられ、対応する駆動力付与手段に連結可能な第1及び第2連結部材とを備えると共に昇降コンベヤには、該昇降コンベヤが下方及び上方のいずれか一方の位置に停止した際に搬入コンベヤ側において回動可能に軸支された第1回動軸を回動する第1回動部材と、上記昇降コンベヤが下方及び上方のいずれか他方の位置に停止した際に搬出コンベヤ側において回動可能に軸支された第2回動軸を回動する第2回動部材と、第1回動部材または第2回動部材の回動に伴って対応する回転軸及び駆動力付与手段のいずれか一方を移動して相互を連結する第1及び第2作動部材とを備え、上記昇降コンベヤが下方位置へ移動停止された際には、第1回動軸の回動に伴って作動する第1作動部材により第1連結部材及び第1駆動力付与手段を連結して搬入コンベヤの搬送駆動力により昇降コンベヤを搬送駆動可能にする一方、昇降コンベヤが上方位置へ移動停止された際には、第2回動軸の回動に伴って作動する第2作動部材により第2連結部材及び第2駆動力付与手段を連結して搬出コンベヤの搬送駆動力により昇降コンベヤを搬送駆動可能にすることを最も主要な特徴とする。
【発明の効果】
【0007】
本発明は、搬入又は搬出コンベヤからの搬送駆動力により昇降コンベヤを搬送駆動することにより昇降コンベヤの駆動部材を省いて昇降コンベヤを小型化及び軽量化すると共にコンベヤシステムの消費電力を低減することができる。
【図面の簡単な説明】
【0008】
【図1】昇降コンベヤシステムの概略を示す略体斜視図である。
【図2】搬入コンベヤの第1駆動力付与手段を示す説明図である。
【図3】昇降コンベヤの正面側を拡大して示す略体斜視図である。
【図4】昇降コンベヤの回転軸移動機構を示す説明図である。
【図5】昇降コンベヤの搬入側回転軸の移動作用を示す説明図である。
【図6】第1駆動力付与手段に対する第1連結部材の連結状態を示す説明図である。
【図7】昇降コンベヤの搬出側回転軸の移動作用を示す一部破断説明図である。
【図8】実施例2に係る第1駆動力付与手段のスライド軸移動機構を示す説明図である。
【図9】実施例2に係る第2駆動力付与手段のスライド軸移動機構を示す説明図である。
【図10】第1駆動力付与手段のスライド軸移動作用を示す説明図である。
【図11】第2駆動力付与手段のスライド軸移動作用を示す説明図である。
【発明を実施するための形態】
【0009】
昇降コンベヤが下方位置へ移動停止された際には、第1回動軸の回動に伴って作動する第1作動部材により第1連結部材及び第1駆動力付与手段を連結して搬入コンベヤの搬送駆動力により昇降コンベヤを搬送駆動可能にする一方、昇降コンベヤが上方位置へ移動停止された際には、第2回動軸の回動に伴って作動する第2作動部材により第2連結部材及び第2駆動力付与手段を連結して搬出コンベヤの搬送駆動力により昇降コンベヤを搬送駆動可能にすることを最良の実施形態とする。
【実施例1】
【0010】
以下、実施例を示す図に従って本発明を説明する。
図1乃至図4に示すように、昇降コンベヤシステム1は搬入側コンベヤ3と、該搬入側コンベヤ3に対して適宜の高さを設けて配置される搬出側コンベヤ5と、上記搬入側コンベヤ3の搬出側端部と搬出側コンベヤ5の搬入側端部の間に配置される昇降コンベヤ7により構成される。
【0011】
上記搬入側コンベヤ3は少なくとも搬送される製品の搬送方向長さの搬送長で、該製品の少なくとも搬送直交方向幅に応じた間隔をおいて相対して固定される一対の支持フレーム9と、該支持フレーム9の搬入側及び搬出側にてそれぞれ回転可能に軸支される回転軸11・13と、上記回転軸11・13(図は搬出側の回転軸13に連結された例を示す。)のいずれか一方の軸端部に連結される数値制御可能なサーボモータ等の電動モータ15と、各回転軸11・13の軸線方向端部にそれぞれ固定された歯付きプーリ等の回転体(図示せず)にそれぞれ掛渡される歯付きベルト等の搬送ベルト17から構成される。
【0012】
また、上記搬入側コンベヤ3の搬出側に位置する回転軸13の一方軸端部には第1駆動力付与手段19が連結される。該第1駆動力付与手段19は、上記回転軸13の一方軸端部に連結されて回転可能に軸支される歯付きプーリ等の回転体19aと、後述する昇降コンベヤ7における搬入側の側方に応じた位置にて回転可能に軸支され、中心部に連結ボス19bが設けられた歯付きプーリ等の回転体19cと、これら回転体19a・19cに掛渡される歯付きベルト等の駆動ベルト19dにより構成される。上記連結ボス19bは中心部に形成された連結凹部の内周面に複数の被係合凹部が周方向へ等間隔で軸線方向へ延出するように形成される。
【0013】
上記搬出側コンベヤ5は上記した搬入側コンベヤ3と同様の構造で、少なくとも搬送される製品の搬送方向長さの搬送長で、該製品の少なくとも搬送直交方向幅に応じた間隔をおいて相対して固定される一対の支持フレーム21と、該支持フレーム21の搬入側及び搬出側にてそれぞれ回転可能に軸支される回転軸23・25と、上記回転軸23・25のいずれか一方(図は搬入側の回転軸23に連結された例を示す。)の軸端部に連結される数値制御可能なサーボモータ等の電動モータ27と、各回転軸23・25の軸線方向端部にそれぞれ固定された歯付きプーリ等の回転体(図示せず)にそれぞれ掛渡される歯付きベルト等の搬送ベルト29から構成される。
【0014】
また、上記搬出側コンベヤ5の搬入側に位置する回転軸23の一方軸端部には第2駆動力付与手段31が連結される。該第2駆動力付与手段31は上記の第1駆動力付与手段19と同様で、上記回転軸23の一方軸端部に連結されて回転可能に軸支される歯付きプーリ等の回転体31aと、後述する昇降コンベヤ7における搬出側の側方に応じた位置にて回転可能に軸支され、中心部に連結ボス31bが設けられた歯付きプーリ等の回転体31cと、これら回転体31a・31cに掛渡される歯付きベルト等の駆動ベルト31dにより構成される。上記連結ボス31bは中心部に形成された連結凹部の内周面に複数の被係合凹部が周方向へ等間隔で軸線方向へ延出するように形成される。
【0015】
なお、上記したように搬出コンベヤ5及び第2駆動力付与手段31は、搬入コンベヤ3及び第1駆動力付与手段19と同一であるため、搬入コンベヤ3及び第1駆動力付与手段19を示す図2に搬出コンベヤ5及び第2駆動力付与手段31の符号を付して図示を省略する。
【0016】
上記昇降コンベヤ7のコンベヤ構造は、基本的には上記の搬入側コンベヤ3及び搬出側コンベヤ5と同様で、少なくとも搬送される製品の搬送方向長さの搬送長で、該製品の少なくとも搬送直交方向幅に応じた間隔をおいて相対して固定された一対の支持フレーム33と、該支持フレーム33の搬入側及び搬出側にてそれぞれ回転可能で、軸線方向へスライド可能に軸支された回転軸35・37と、各回転軸35・37の軸線方向端部にそれぞれ固定された歯付きプーリ等の回転体34・36にそれぞれ掛渡される歯付きベルト等の搬送ベルト39から構成される。
【0017】
各支持フレーム33から外側へ突出する各回転軸35・37の両軸端部には圧縮ばね等の弾性部材41・43がそれぞれ装着され、各弾性部材41・43の弾性力により各支持フレーム33に対して対応する回転軸35・37が中立位置、即ち支持フレーム33から外側へ突出する各回転軸35・37の軸端部の長さが等しくなるように付勢される。
【0018】
また、回転軸35の一方軸端部(図示する手前側)には対応する第1駆動力付与手段19の連結ボス19bに挿嵌して連結する第1連結部材45が、また回転軸37の一方軸端部(図示する手前側)には対応する第2駆動力付与手段31の連結ボス31bに挿嵌して連結する第2連結部材47がそれぞれ設けられる。各第1及び第2連結部材45・47は対応する連結ボス19b・31bに挿嵌する大きさの円盤状で、外周面に対応する被係合凹部に係合する係合突部45a・47aが形成される。
【0019】
上記昇降コンベヤ7は上記搬入側コンベヤ3の搬入側端部と搬出コンベヤ5の搬入側端部に至る高さの昇降フレーム49に対して昇降可能に支持される。該昇降フレーム49には搬入側コンベヤ3及び搬出コンベヤ5の高低差に応じた上下長さで、昇降コンベヤ7の搬送直交方向幅より若干広い間隔をおいて相対する一対の上下フレーム51(本例は上下フレーム51をパイプで構成した例を示す。)が立設される。各上下フレーム51の下部には搬送直交方向に軸線を有し、数値制御可能なサーボモータ等の電動モータ53に連結された回転軸55が回転可能に軸支され、電動モータ53の駆動により上記回転軸55が正逆方向へ回転される。
【0020】
なお、昇降フレーム49の下方位置及び上方位置にはストッパ(図示せず)が昇降コンベヤ7に当接して移動を規制するようにそれぞれ設けられ、昇降コンベヤ7が昇降フレーム49の下方位置へ移動された際には更に下方へ、また上方位置へ移動された際には更に上方へ移動するのを規制する。
【0021】
上記回転軸55の各軸端部及び各上下フレーム51の上端部には回転体57(図は上端部に取付けられる回転体のみを示し、回転軸55に取付けられる回転体に付いては、図示を省略する。)がそれぞれ回転可能に軸支され、各回転体57間には金属ワイヤやベルト等の上下走行部材61が後述するように掛渡される。
【0022】
また、昇降コンベヤ7の各支持フレーム33下部には搬送直交方向の外側へ突出する取付け板63がそれぞれ設けられ、各取付け板63には上下方向に軸線を有した中空状の軸受部材65がそれぞれ設けられる。そして各上下フレーム51にはそれぞれの軸受部材65が上下方向へ摺動するようにそれぞれ支持され、各上下フレーム51に対して昇降コンベヤ7が各軸受部材65を介して昇降するように支持される。
【0023】
また、各取付け板63には上下方向に軸線を有し、第1連結部材45を連結ボス19bに、また第2連結部材47を連結ボス31bにそれぞれ連結させる際の回転軸35・37の移動距離に対応する軸線長さで、第1回動部材の一部を構成する上下スライド軸67が上下方向へ摺動可能で、かつ抜け止めされた状態でそれぞれ軸支される。各取付け板63の下面側に位置する上下スライド軸67には圧縮ばね等の弾性部材69がそれぞれ設けられる。また、各上下スライド軸67の上部及び下部にはそれぞれの上下走行部材61が緊張状態で取付けられる。
【0024】
上記取付け板63から上方へ突出する上下スライド軸67には作動板71が取付けられる。該作動板67の搬入側には回転軸35を軸線方向へ移動する際に後述する第1回動軸79を回動させる第1回動部材の一部を構成する第1ロッド73の基端部が固定される。また、作動板71の搬出側には上下方向に軸線を有して取付け板63に形成された貫通孔63a内を挿通して取付け板63の下面側に至る取付けロッド75の基端部が固定され、該取付けロッド75の下端部には回転軸37を軸線方向へ移動する際に第2回動軸87を回動する第2回動部材の一部を構成するための第2ロッド77の基端部が固定される。
【0025】
上記取付け板63及び昇降コンベヤ7における支持フレーム33の搬入側下部にて外側へ水平に突出した軸支板33aには搬送方向に軸線を有した第1回動軸79の各軸端部が回動可能に軸支され、第1ロッド73側の第1回動軸79端部には第1回動部材の一部を構成する揺動アーム81の基端部が固定される。また、搬入側の第1回動軸79端部には揺動アーム83の基端部が固定され、該揺動アーム83の先端部には支持フレーム33の搬入側と上記弾性部材41の間に位置する回転軸35に遊嵌する切欠き部85aを有した第1作動部材としての第1作動板85が回動可能に軸支される。
【0026】
また、取付け板63及び昇降コンベヤ7における支持フレーム33の搬出側下部にて外側へ水平に突出した軸支板33bには搬送方向に軸線を有した第2回動軸87の軸端部が回動可能に軸支され、第2ロッド77側の第2回動軸87端部には第2回動部材の一部を構成する揺動アーム89の基端部が固定される。また、搬出側の第2回動軸87端部には揺動アーム91の基端部が固定され、該揺動アーム91の先端部には支持フレーム33の搬出側と上記弾性部材43の間に位置する回転軸37に遊嵌する切欠き部93aを有した第2作動部材としての第2作動板93が回動可能に軸支される。
【0027】
なお、図中の符号95は弾性部材41及び第1作動板85の間の回転軸35に挿通される座金、符号97は弾性部材43及び第2作動板93の間の回転軸37に挿通される座金である。
【0028】
次に、上記のように構成された昇降搬送システム1による搬送作用を説明する。
先ず、上記昇降搬送システム1による製品の昇降搬送作用の概略を説明すると、昇降コンベヤ7が昇降フレーム49の下方位置へ移動された際に、搬入コンベヤ3の第1駆動力付与手段19に対して昇降コンベヤ7における回転軸35に設けられた第1連結部材45が連結される。該状態にて搬入コンベヤ3の電動モータ15が駆動されると、搬出側の回転軸13の回転に伴って搬送ベルト17を走行させると共に第1駆動力付与手段19に連結された第1連結部材45を介して回転軸13の回転力を昇降コンベヤ7の回転軸35へ伝達して搬送ベルト39を搬入コンベヤ3と一致する方向へ搬送走行させる。
【0029】
上記状態にて製品が搬入コンベヤ3の搬送ベルト17上に載置されると、該製品は搬入コンベヤ3の搬出側へ搬送された後に昇降コンベヤ7上に移載される。そして製品の搬送方向下手側端部が昇降コンベヤ7の搬出側に位置するように搬送されると、該昇降コンベヤ7の搬出側に設けられた図示しない製品検出器からの信号に基づいて上記電動モータ15の駆動を停止して搬入コンベヤ3における搬送ベルト17及び昇降コンベヤ7における搬送ベルト39の走行を停止させる。
【0030】
上記電動モータ15の駆動が停止したタイミング又は若干遅延したタイミングで電動モータ53を駆動して上下走行部材61を走行させて上下フレーム51に対して昇降コンベヤ7を上方へ移動し、該昇降コンベヤ7が所定の上方位置へ移動した後に若干遅延したタイミングで上記電動モータ53の駆動を停止して搬出コンベヤ5に接続させると共に昇降コンベヤ7における搬出側の回転軸37に設けられた第2連結部材47を第2駆動力付与手段31に連結させる。
【0031】
昇降コンベヤ7の第2連結部材47が第2駆動力付与手段31に連結されたタイミングで電動モータ27を駆動すると、搬入側の回転軸23を回転して搬出コンベヤ5の搬送ベルト29を図示する実線矢印方向へ走行させると共に第2駆動力付与手段31に連結された第2連結部材47を介して回転軸37を回転して昇降コンベヤ7の搬送ベルト39を搬出コンベヤ5と一致する方向へ走行させて昇降コンベヤ7上の製品を搬出コンベヤ5上へ移載して搬出させる。
【0032】
次に、昇降コンベヤ7が下方位置へ移動した際に第1駆動力付与手段19に第1連結部材45を連結する作用を説明すると、電動モータ53の駆動により昇降コンベヤ7が上下フレーム51を摺動しながら搬入コンベヤ3に一致する昇降フレーム49の下方位置へ移動して停止される。この状態にて昇降コンベヤ7における回転軸35の一方端部に設けられた第1連結部材45は第1駆動力付与手段19の連結ボス19bに対して回転軸35の移動距離に対応する間隔をおいて相対される。
【0033】
そして昇降フレーム49が下方位置に停止した状態で電動モータ53の駆動を継続して上下走行部材61を更に下方向へ走行させると、停止した昇降コンベヤ7の取付け板63に対して電動モータ53の継続駆動により走行する上下走行部材61により上下スライド軸67が取付け板63に対して下方向へ移動される。
【0034】
上下スライド軸67が下方向へ移動されると、該上下スライド軸67と一体に移動する作動板71に設けられた第1ロッド73の下端部を揺動アーム81の先端部に当接して揺動させることにより第1回動軸79を揺動アーム81の揺動角に対応して回動させる。
【0035】
第1回動軸79の回動により揺動アーム83を上記所定の角度で揺動して回転軸35の軸端部において第1作動板85が軸線方向外側へ移動されると、弾性部材41を弾性変形させながら回転軸35を軸線方向外側へ移動して第1連結部材45を第1駆動力付与手段19における連結ボス19b内へ突入して係合突部45aを被係合凹部に係合して連結させる。(図5及び図6参照)
【0036】
上記状態にて電動モータ15が駆動されて搬入コンベヤ3が搬送駆動されると、第1駆動力付与手段19に連結された第1連結部材45を介して電動モータ15の駆動力を回転軸35に伝達して昇降コンベヤ7を搬入コンベヤ3と同期して搬送駆動させる。
【0037】
次に、昇降コンベヤ7が上方位置へ移動した際に第2駆動力付与手段31に第2連結部材47を連結する作用を説明すると、電動モータ53の駆動により昇降コンベヤ7が上下フレーム51を摺動しながら搬出コンベヤ5に一致する昇降フレーム49の上方位置へ移動して停止される。この状態にて昇降コンベヤ7における回転軸37の一方端部に設けられた第2連結部材47は第2駆動力付与手段31の連結ボス31bに対して回転軸37の移動距離に対応する間隔をおいて相対される。
【0038】
そして昇降フレーム49が下方位置に停止した状態で電動モータ53の駆動を継続して上下走行部材61を更に上方向へ走行させると、停止した昇降コンベヤ7の取付け板63に対して電動モータ53の継続駆動により走行する上下走行部材61により上下スライド軸67が取付け板63に対して上方向へ移動される。
【0039】
上下スライド軸67が上方向へ移動されると、該上下スライド軸67と一体に移動する作動板71に設けられた取付けロッド75を上方へ移動して第2ロッド77の上端部を揺動アーム89の先端部に当接して揺動させることにより第2回動軸87を揺動アーム89の揺動角に対応して回動させる。
【0040】
第2回動軸87の回動により揺動アーム91を上記所定の角度で揺動して回転軸37の軸端部において第2作動板87が軸線方向外側へ移動されると、弾性部材43を弾性変形させながら回転軸37を軸線方向外側へ移動して第2連結部材47を第2駆動力付与手段31における連結ボス31b内へ突入して係合突部47aを被係合凹部に係合して連結させる。(図7参照)
【0041】
なお、上記した第2駆動力付与手段31の連結ボス31bに対する第2連結部材47の連結状態に付いては、第1駆動力付与手段19の連結ボス19bに対する第1連結部材45の連結と同様であるため、図6に第2駆動力付与手段31の連結ボス31bに第2連結部材47を連結する際の部材の符号を付して図示を省略する。
【0042】
上記状態にて電動モータ27が駆動されて搬出コンベヤ5が搬送駆動されると、第2駆動力付与手段31に連結された第2連結部材47を介して電動モータ27の駆動力を回転軸37へ伝達して昇降コンベヤ7を搬出コンベヤ5と同期して搬送駆動させる。
【0043】
本実施例は昇降コンベヤ7が昇降フレーム49の下方位置へ移動された際には、搬入コンベヤ3における電動モータ15の駆動力により、また昇降コンベヤ7が昇降フレーム49の上方位置へ移動された際には、搬出コンベヤ5における電動モータ27の駆動力により昇降コンベヤ7を搬入コンベヤ3、搬出コンベヤ5に同期して搬送駆動して製品を搬送することができ、昇降コンベヤ7の電動モータを省くことにより昇降コンベヤ7自体を小型化及び軽量化することができる。
【0044】
また、第1駆動力付与手段19に対して第1連結部材45を、また第2駆動力付与手段31に対して第2連結部材47をそれぞれ連結する際には、昇降フレーム49の下方位置又は上方位置に昇降コンベヤ7を停止させた後に回転軸35・37を軸線方向へ移動して連結させるため、上記連結を確実に行うことができる。
【実施例2】
【0045】
実施例1は、昇降コンベヤ7が下方位置へ移動した際には回転軸35を第1駆動力付与手段19側へ、また上方位置へ移動した際には回転軸37を第2駆動力付与手段31側へそれぞれ移動して駆動連結する構成としたが、本実施例2は昇降コンベヤ7が下方位置へ移動した際には第1駆動力付与手段19の連結ボス19bを回転軸35側へ、また上方位置へ移動した際には第2駆動力付与手段31の連結ボス31bを回転軸37側へそれぞれ移動して駆動連結することを特徴とする。
【0046】
図8に示すように第1駆動力付与手段101はケース103内に回転軸13の一方軸端部に連結されて回転可能に軸支された歯付きプーリ等の一方の回転体101a及び昇降コンベヤ7の回転軸35に対して適宜の間隔をおいて回転可能に軸支された歯付きプーリ等の他方の回転体101bと、該他方の回転体101bの中心部にて回転軸35に至るストロークで軸線方向へ摺動可能で、かつ回り止めされて軸支されるスライド軸101cと、回転軸35に相対する軸部材としてのスライド軸101cの軸端部に設けられる連結ボス101dと、上記各回転体101a・101bに掛渡される歯付きベルト等の駆動ベルト101eから構成される。そして上記回転軸35の軸端部に対する連結ボス101dの相対面側には内周面に溝を有し、第2連結部材47が挿嵌される係合凹部(図示せず)が形成される。
【0047】
なお、他方の回転体101bにおいて連結ボス101dの反対側へ突出するスライド軸101cの軸端部と他方の回転体101b間には圧縮ばね等の弾性部材105が装着され、該弾性部材105の弾性力により上記スライド軸101cを連結ボス101dの反対側へ付勢する。
【0048】
一方、昇降コンベヤ7の下方移動位置に対応する昇降フレーム49及び第1駆動力付与手段101におけるスライド軸101cに応じたケース103には第1回動軸107の各軸端部が回動可能に軸支される。上記取付け板63側の第1回動軸107の軸端部には先端部が第1ロッド73に当接可能な第1回動部材の一部を構成する揺動アーム109の基端部が固定される。また、第1駆動力付与手段101側の第1回動軸107の軸端部には先端部が連結ボス101d側に位置し、正面コ字形からなる揺動アーム111の基端部が固定される。そして上記揺動アーム111には他方の回転体101bと連結ボス101d間のスライド軸101cに遊嵌される第1作動部材としての第1作動板113が回動可能に軸支される。
【0049】
図9に示すように第2駆動力付与手段115はケース117内に回転軸23の一方軸端部に連結されて回転可能に軸支された歯付きプーリ等の一方の回転体115a及び昇降コンベヤ7の回転軸37に対して適宜の間隔をおいて回転可能に軸支された歯付きプーリ等の他方の回転体115bと、該他方の回転体115bの中心部にて回転軸37に至るストロークで軸線方向へ摺動可能で、かつ回り止めされて軸支されるスライド軸115cと、回転軸37に相対する軸部材としてのスライド軸115cの軸端部に固定される連結ボス115dと、上記各回転体115a・115bに掛渡される歯付きベルト等の駆動ベルト115eから構成される。そして上記回転軸37の軸端部に対する連結ボス115dの相対面側には内周面に溝を有し、第2連結部材47が挿嵌される係合凹部(図示せず)が形成される。
【0050】
なお、他方の回転体115bにおいて連結ボス115dの反対側へ突出するスライド軸115cの軸端部と他方の回転体115b間には圧縮ばね等の弾性部材119が装着され、該弾性部材119の弾性力により上記スライド軸115cを連結ボス115dの反対側へ付勢する。
【0051】
一方、昇降コンベヤ7の上方移動位置に対応する昇降フレーム49及び第2駆動力付与手段115におけるスライド軸115cに応じたケース117には第2回動軸121の各軸端部が回動可能に軸支される。上記取付け板63側の第2回動軸121の軸端部には先端部が第2ロッド77に当接可能な第2回動部材の一部を構成する揺動アーム123の基端部が固定される。また、第2駆動力付与手段115側の第2回動軸121の軸端部には先端部が連結ボス115d側に位置し、正面コ字形の揺動アーム125の基端部が固定される。そして上記揺動アーム125には他方の回転体115bと連結ボス115d間のスライド軸115cに遊嵌される第2作動部材としての第2作動板127が回動可能に軸支される。
なお、実施例1と同一の部材に付いては、同一の符号を付して詳細な説明を省略する。
【0052】
次に、上記のように構成された第1駆動力付与手段101に対する第1連結部材45及び第2駆動力付与手段115に対する第2連結部材47の連結作用を説明する。
先ず、第1駆動力付与手段101に対する第1連結部材45の連結作用を説明すると、電動モータ53の駆動により昇降コンベヤ7が上下フレーム51を摺動しながら搬入コンベヤ3に一致する昇降フレーム49の下方位置へ移動して停止される。この状態にて第1駆動力付与手段101の連結ボス101dは昇降コンベヤ7における回転軸35の一方端部に対してスライド軸101cの移動距離に応じた間隔をおいて離間している。
【0053】
そして昇降フレーム49が下方位置に停止した状態で電動モータ53の駆動を継続して上下走行部材61を更に下方向へ走行させると、停止した昇降コンベヤ7の取付け板63に対して電動モータ53の継続駆動により走行する上下走行部材61により上下スライド軸67が取付け板63に対して下方向へ移動される。
【0054】
上下スライド軸67が下方向へ移動されると、該上下スライド軸67と一体に移動する作動板71に設けられた第1ロッド73の下端部に当接する揺動アーム109が揺動して第1回動軸107を揺動アーム109の揺動角に応じて回動させる。
【0055】
第1回動軸107の回動により他方の揺動アーム111を上記所定の角度で揺動し、第1作動板113が軸線方向内側へ移動される。これによりスライド軸101cは弾性部材105の弾性力に抗して移動して第1連結部材45を連結ボス101dに挿嵌して連結させる。(図10参照)
【0056】
上記状態にて電動モータ15が駆動されて搬入コンベヤ3が搬送駆動されると、第1駆動力付与手段101に連結された第1連結部材45を介して昇降コンベヤ7の回転軸35を回転して昇降コンベヤ7を搬入コンベヤ3と同期して搬送駆動させる。
【0057】
次に、昇降コンベヤ7が上方位置へ移動した際に第2駆動力付与手段115に第2連結部材47を連結する作用を説明すると、電動モータ53の駆動により昇降コンベヤ7が上下フレーム51を摺動しながら搬出コンベヤ5に一致する昇降フレーム49の上方位置へ移動して停止される。この状態にて第2駆動力付与手段115の連結ボス115dは昇降コンベヤ7における回転軸37の一方端部に対してスライド軸115cの移動距離に応じた間隔をおいて離間している。
【0058】
そして昇降フレーム49が上方位置に停止した状態で電動モータ53の駆動を継続して上下走行部材61を更に上方向へ走行させると、停止した昇降コンベヤ7の取付け板63に対して電動モータ53の継続駆動により走行する上下走行部材61により上下スライド軸67が取付け板63に対して上方向へ移動される。
【0059】
上方向に対する上下スライド軸67の移動に伴って作動板71に設けられた第2ロッド77の上端部に当接する揺動アーム123が揺動して第2回動軸121を揺動アーム123の揺動角に応じて回動させる。
【0060】
第2回動軸121の回動により他方の揺動アーム125を上記所定の角度で揺動し、第2作動板127を軸線方向内側へ移動される。これによりスライド軸115cは弾性部材119の弾性力に抗して移動して第2連結部材47を連結ボス115dに挿嵌して連結させる。(図11参照)
【0061】
上記状態にて電動モータ27が駆動されて搬出コンベヤ5が搬送駆動されると、第2駆動力付与手段115に連結された第2連結部材47を介して昇降コンベヤ7の回転軸37を回転して昇降コンベヤ7を搬出コンベヤ5と同期して搬送駆動させる。
【0062】
上記説明は、下方に配置された搬入コンベヤ3に載置された製品を該搬入コンベヤに対して所要の高さを設けて上方に配置された搬出コンベヤまで持ち上げて搬送する態様により説明したが、上方に配置された搬入コンベヤに載置された製品を該搬入コンベヤに対して所要の高さを設けて下方に配置された搬出コンベヤまで下降して搬送する態様として実施してもよい。
【符号の説明】
【0063】
1 昇降コンベヤシステム
3 搬入側コンベヤ
5 搬出側コンベヤ
7 昇降コンベヤ
9 支持フレーム
11 回転軸
13 回転軸
15 電動モータ
17 搬送ベルト
19 第1駆動力付与手段
19a 回転体
19b 連結ボス
19c 回転体
19d 駆動ベルト
21 支持フレーム
23 回転軸
25 回転軸
27 電動モータ
29 搬送ベルト
31 第2駆動力付与手段
31a 回転体
31b 連結ボス
31c 回転体
31d 駆動ベルト
33 支持フレーム
33a 軸支板
33b 軸支板
34 回転体
35 回転軸
36 回転体
37 回転軸
39 搬送ベルト
41 弾性部材
43 弾性部材
45 第1連結部材
45a 係合突部
47 第2連結部材
47a 係合突部
49 昇降フレーム
51 上下フレーム
53 電動モータ
55 回転軸
57 回転体
61 上下走行部材
63 取付け板
63a 貫通孔
65 軸受部材
67 上下スライド軸
69 弾性部材
71 作動板
73 第1回動部材の一部を構成する第1ロッド
75 取付けロッド
77 第2回動部材の一部を構成する第2ロッド
79 第1回動軸
81 第1回動部材の一部を構成する揺動アーム
83 揺動アーム
85 第1作動部材としての第1作動板
87 第2回動軸
89 第2回動部材の一部を構成する揺動アーム
91 揺動アーム
93 第2作動部材としての第2作動板
95 座金盤
97 座金盤
101 第1駆動力付与手段
101a 回転体
101b 回転体
101c 軸部材としてのスライド軸
101d 連結ボス
101e 駆動ベルト
103 ケース
105 弾性部材
107 第1回動軸
109 第1回動部材の一部を構成する揺動アーム
111 揺動アーム
113 第1作動部材としての第1作動板
115 第2駆動力付与手段
115a 回転体
115b 回転体
115c 軸部材としてのスライド軸
115d 連結ボス
115e 駆動ベルト
117 ケース
119 弾性部材
121 第2回動軸
123 第2回動部材の一部を構成する揺動アーム
125 揺動アーム
127 第2作動部材としての第2作動板
【特許請求の範囲】
【請求項1】
搬入コンベヤと、該搬入コンベヤに対して高低差を設けて配置される搬出コンベヤと、上記搬入コンベヤ及び搬出コンベヤ間に配置され、それぞれのコンベヤに一致するように昇降される昇降コンベヤからなる昇降搬送システムにおいて、
上記搬入コンベヤ及び搬出コンベヤにそれぞれ設けられ、昇降コンベヤに対して各コンベヤの搬送駆動力をそれぞれ付与する第1及び第2駆動力付与手段と、
昇降コンベヤの搬入側及び搬出側において搬送直交方向に軸線を有して回転可能に軸支された回転軸の軸端部にそれぞれ設けられ、対応する駆動力付与手段に連結可能な第1及び第2連結部材と、
を備えると共に、
昇降コンベヤは、該昇降コンベヤが搬入コンベヤに一致する位置へ移動した際に搬入コンベヤ側に回動可能に軸支された第1回動軸を回動する第1回動部材と、
上記昇降コンベヤが搬出コンベヤに一致する位置へ移動した際に搬出コンベヤ側において回動可能に軸支された第2回動軸を回動する第2回動部材と、
第1回動部材または第2回動部材の回動に伴って対応する回転軸及び駆動力付与手段のいずれか一方を移動して相互を連結する第1及び第2作動部材と、
を備え、
上記昇降コンベヤが下方位置へ移動停止された際には、第1回動軸の回動に伴って作動する第1作動部材により第1連結部材及び第1駆動力付与手段を連結して搬入コンベヤの搬送駆動力により昇降コンベヤを搬送駆動可能にする一方、昇降コンベヤが上方位置へ移動停止された際には、第2回動軸の回動に伴って作動する第2作動部材により第2連結部材及び第2駆動力付与手段を連結して搬出コンベヤの搬送駆動力により昇降コンベヤを搬送駆動可能にする昇降コンベヤシステム。
【請求項2】
請求項1において、昇降コンベヤの搬入側及び搬出側にて回転可能に軸支された各回転軸は軸線方向へ摺動可能に支持され、第1回動軸また第2回動軸の回動に伴って作動する第1又は第2作動部材により対応する駆動力付与手段側へ移動して第1又は第2連結部材を連結可能にした昇降コンベヤシステム。
【請求項3】
請求項2において、第1及び第2回動軸は昇降コンベヤの搬送方向一致する方向に軸線を有して昇降コンベヤに回動可能に支持され、昇降コンベヤが下方位置又は上方位置へ移動された際に作動される回動部材により作動部材を作動して対応する回転軸を軸線方向へ移動して対応する駆動力付与手段に対して連結部材を連結可能にした昇降コンベヤシステム。
【請求項4】
請求項1において、第1及び第2駆動力付与手段は対応する連結部材が連結される連結ボスが設けられた軸部材を回り止めされた状態で軸線方向へ摺動可能に支持し、第1回動軸また第2回動軸の回動に伴って作動する第1又は第2作動部材により軸部材を対応する昇降コンベヤの回転軸側へ移動して連結ボスに連結部材を連結可能にした昇降コンベヤシステム。
【請求項5】
請求項3において、第1及び第2回動軸は昇降コンベヤを昇降可能に支持する昇降フレームの下方位置及び下方位置にて搬送方向一致する方向に軸線を有して回動可能に支持され、昇降コンベヤが下方位置又は上方位置へ移動された際に作動される回動部材により作動部材を作動して対応する軸部材を回転軸側へ移動して連結部材に連結ボスを連結可能にした昇降コンベヤシステム。
【請求項6】
請求項1において、昇降コンベヤは昇降フレームに対して上下方向へ移動可能に支持され、上下方向に亘って掛渡された上下走行部材の走行に伴って昇降されると共に第1及び第2回動部材は昇降コンベヤに対して上下方向へ軸線を有して摺動可能に軸支され、上部及び下部に上下走行部材が取付けられたスライド軸に設けられたそれぞれのロッドにより第1及び第2回動軸に設けられた揺動アームを揺動して回動可能にとした昇降コンベヤシステム。
【請求項1】
搬入コンベヤと、該搬入コンベヤに対して高低差を設けて配置される搬出コンベヤと、上記搬入コンベヤ及び搬出コンベヤ間に配置され、それぞれのコンベヤに一致するように昇降される昇降コンベヤからなる昇降搬送システムにおいて、
上記搬入コンベヤ及び搬出コンベヤにそれぞれ設けられ、昇降コンベヤに対して各コンベヤの搬送駆動力をそれぞれ付与する第1及び第2駆動力付与手段と、
昇降コンベヤの搬入側及び搬出側において搬送直交方向に軸線を有して回転可能に軸支された回転軸の軸端部にそれぞれ設けられ、対応する駆動力付与手段に連結可能な第1及び第2連結部材と、
を備えると共に、
昇降コンベヤは、該昇降コンベヤが搬入コンベヤに一致する位置へ移動した際に搬入コンベヤ側に回動可能に軸支された第1回動軸を回動する第1回動部材と、
上記昇降コンベヤが搬出コンベヤに一致する位置へ移動した際に搬出コンベヤ側において回動可能に軸支された第2回動軸を回動する第2回動部材と、
第1回動部材または第2回動部材の回動に伴って対応する回転軸及び駆動力付与手段のいずれか一方を移動して相互を連結する第1及び第2作動部材と、
を備え、
上記昇降コンベヤが下方位置へ移動停止された際には、第1回動軸の回動に伴って作動する第1作動部材により第1連結部材及び第1駆動力付与手段を連結して搬入コンベヤの搬送駆動力により昇降コンベヤを搬送駆動可能にする一方、昇降コンベヤが上方位置へ移動停止された際には、第2回動軸の回動に伴って作動する第2作動部材により第2連結部材及び第2駆動力付与手段を連結して搬出コンベヤの搬送駆動力により昇降コンベヤを搬送駆動可能にする昇降コンベヤシステム。
【請求項2】
請求項1において、昇降コンベヤの搬入側及び搬出側にて回転可能に軸支された各回転軸は軸線方向へ摺動可能に支持され、第1回動軸また第2回動軸の回動に伴って作動する第1又は第2作動部材により対応する駆動力付与手段側へ移動して第1又は第2連結部材を連結可能にした昇降コンベヤシステム。
【請求項3】
請求項2において、第1及び第2回動軸は昇降コンベヤの搬送方向一致する方向に軸線を有して昇降コンベヤに回動可能に支持され、昇降コンベヤが下方位置又は上方位置へ移動された際に作動される回動部材により作動部材を作動して対応する回転軸を軸線方向へ移動して対応する駆動力付与手段に対して連結部材を連結可能にした昇降コンベヤシステム。
【請求項4】
請求項1において、第1及び第2駆動力付与手段は対応する連結部材が連結される連結ボスが設けられた軸部材を回り止めされた状態で軸線方向へ摺動可能に支持し、第1回動軸また第2回動軸の回動に伴って作動する第1又は第2作動部材により軸部材を対応する昇降コンベヤの回転軸側へ移動して連結ボスに連結部材を連結可能にした昇降コンベヤシステム。
【請求項5】
請求項3において、第1及び第2回動軸は昇降コンベヤを昇降可能に支持する昇降フレームの下方位置及び下方位置にて搬送方向一致する方向に軸線を有して回動可能に支持され、昇降コンベヤが下方位置又は上方位置へ移動された際に作動される回動部材により作動部材を作動して対応する軸部材を回転軸側へ移動して連結部材に連結ボスを連結可能にした昇降コンベヤシステム。
【請求項6】
請求項1において、昇降コンベヤは昇降フレームに対して上下方向へ移動可能に支持され、上下方向に亘って掛渡された上下走行部材の走行に伴って昇降されると共に第1及び第2回動部材は昇降コンベヤに対して上下方向へ軸線を有して摺動可能に軸支され、上部及び下部に上下走行部材が取付けられたスライド軸に設けられたそれぞれのロッドにより第1及び第2回動軸に設けられた揺動アームを揺動して回動可能にとした昇降コンベヤシステム。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図8】
【図9】

【図10】
【図11】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−43744(P2013−43744A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−182306(P2011−182306)
【出願日】平成23年8月24日(2011.8.24)
【出願人】(506329292)スターテクノ株式会社 (45)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月24日(2011.8.24)
【出願人】(506329292)スターテクノ株式会社 (45)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]