
国際特許分類[B65G47/52]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | コンベヤに関連して物品または物質の取り扱い装置;そのような装置を用いる方法 (3,876) | コンベヤ間で物品または物質を移送する装置,すなわち排出または供給装置 (711)
国際特許分類[B65G47/52]の下位に属する分類
互いに交差しているコンベヤ間で行なうもの (106)
傾斜または垂直コンベヤ部まで,または前記部から行うもの (18)
吊り下げられたコンベヤまで,またはコンベヤから行うもの,例.トロリー型のもの (28)
分岐コンベヤ (35)
固定プラットホームまたは櫛状のもの,例.コンベヤ間の橋 (3)
一つのコンベヤからくる物品を受け入れ,それらの物品を二つ以上のコンベヤにそれぞれ移送するのに用いるもの,または逆も同様,例.二つ以上のコンベヤによって運ばれる物品の流れの結合 (191)
物質をばらで一つのコンベヤから数個のコンベヤへの移送,またはその逆も同様 (6)
国際特許分類[B65G47/52]に分類される特許
1 - 10 / 324
搬送装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
無人搬送車による台車の自動搬送システム
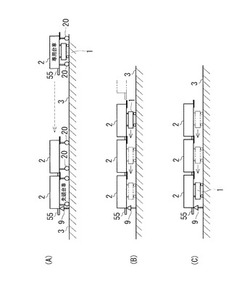
【課題】簡易な機械式の構成で実施する、無人搬送車による台車の自動搬送システムを提供する。
【解決手段】無人搬送車1と、該無人搬送車1により牽引し走行させて指定場所へ運ばれる専用台車2との組み合わせで構成され、無人搬送車1は、誘導路上の指定場所で相互に連結されて一列状態で待機する台車列の床下空間を潜って最先順位の台車2まで進み、最先順位の台車2の被牽引具5における牽引用フラップ53へ牽引ピン4が突き当たった段階で同台車2の牽引を開始し、次順の台車2と連結した連結具7が連結解除ドグ9の位置へ到達した段階で前記連結を解除され、無人搬送車1はそのまま最先順位の1台の台車2を牽引して前進走行する。
(もっと読む)
ワーク搬送システム

【課題】搬入台車上のワークの高さの調整を容易に行い、また、工場内のレイアウトを自由に設定できるようにする。
【解決手段】走行機構121を備える台車本体12と前記台車本体12に対して昇降可能に連結されてワークWを載置する載置部11とを有する搬送台車10と、搬入口21から搬入される前記ワークWに加工処理を行う工作機械20とを備えるワーク搬送システムであって、前記搬送台車10に、前記載置部11に取り付けられる係合部112を設け、前記工作機械20に、前記係合部112と係合して前記載置部11を上下方向にガイドする昇降ガイドレール22を設け、前記搬送台車10の走行によって前記係合部112が前記昇降ガイドレール22によりガイドされ、前記載置部11が前記搬入口に対して所定の高さとなるように位置決めされる。
(もっと読む)
フィルム材の貼合装置
【課題】設置スペースを最小限に抑えつつ、周辺での作業に支障をきたすことがないフィルム材の貼合装置を提供する。
【解決手段】 液晶パネルを搬送するローラコンベア5と、液晶パネルの表裏面に貼合される偏光フィルムの偏光フィルムシートをロールR1から巻き出すと共にハーフカットして切り出す搬送装置と、ロールR1を支持する搬送台車30を備え、搬送台車30がロール収容エリアとローラコンベア5下方のロール配置位置との間を移動可能に設けられ、搬送台車30は、走行するべース部32とこのベース部32上でロールR1を支持するロール支持部33とを備え、ベース部32に対してロール支持部33が水平面内で姿勢変化可能に支持され、搬送台車30とローラコンベア5との間に、ローラコンベア5に対してロール支持部33を位置決めするエアー浮上装置29及び水平方向位置決め装置50が設けられている。
(もっと読む)
搬送車
【課題】搬送車が他の装置からの信号に依存することなく荷物搬出時の移載装置の動作を自律的に止める。
【解決手段】荷物210を搬送する搬送車100であって、他の装置との間で荷物210を搬出入するコンベア式の移載装置101と、移載装置101の搬出入を制御する制御装置102と、移載装置101の所定箇所における荷物210の有無を検出する荷検出器103とを備え、制御装置102は、移載装置101を用いて荷物210を搬入する際に、荷検出器103を用いて検出される荷物210の搬出入方向における長さを示す搬入情報を取得する搬入情報取得部121と、移載装置101を用いて荷物210を搬出する際に、搬入情報を用いて移載装置101の搬出動作を停止させる搬出動作停止部122とを備える。
(もっと読む)
ベルトコンベヤ蛇行防止装置
【課題】上流ベルトコンベヤの端部から下流ベルトコンベヤに積荷を落下して移載する場合に、板などに非接触で積荷の落下位置を調整することにより故障や積荷落下点変化の問題を回避することが可能なベルトコンベヤ蛇行防止装置を提供する。
【解決手段】下流ベルトコンベヤ2の下流ベルト4の蛇行量を蛇行センサ5で検出し、検出された下流ベルト4の蛇行量に基づいて上流ベルトコンベヤ1の上流ベルト3の速度を制御装置6で制御する。その際、下流ベルト4が上流ベルトコンベヤ1の積荷搬送方向先方側に蛇行している場合に上流ベルト3の速度を大きくし、積荷搬送方向手前側に蛇行している場合に上流ベルト3の速度を小さくすることにより、下流ベルト4の蛇行量に応じて上流ベルト3の速度を自動制御することができる。また、上流ベルト3の速度は所定の速度変化率で変更することにより、積荷の落下位置が乱れにくい。
(もっと読む)
検査装置、及び搬送装置
【課題】生産性の高い検査装置、及び搬送装置を提供する。
【解決手段】本発明の一態様にかかる検査装置は、前段搬送ベルト21と後段搬送ベルト23との間において、基板10を支持して、照明する照明ステージ22と、基板10を持ち上げる移載部31を有し、前段搬送ベルト21から照明ステージ22に受け渡すともに、照明ステージ22から後段搬送ベルト23に基板10を受け渡すための動作を行うクランク機構32と、移載部31に設けられ、移載部31で持ち上げられた基板10に向けて下側から照明光を照射する照明部31aと、一の基板10が照明ステージ22を介して前段搬送ベルト21から後段搬送ベルト23に移載されるまでの間に、照明ステージ22及び照明部31aで照明された一の基板10を撮像する撮像部35と、を備えるものである。
(もっと読む)
搬送車システム
【課題】経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とする搬送車システムを提供すること。
【解決手段】経路140と、複数の搬送車300と、複数の搬送車300の制御を行うコントローラ120とを備える搬送車システム100であって、MCS120は、搬送要求を受信する通信部121と、進入禁止区間を示す区間情報および予備期間を示す予備期間情報を記憶する記憶部122と、搬送要求が、予備期間内において実行の開始が予定され、かつ、目的地が進入禁止区間に含まれている特定搬送要求であるか否かを判定する判定部125と、当該搬送要求が特定搬送要求であると判定された場合、目的地の代わりとなる代替目的地を決定する代替目的地決定部126と、決定された代替目的地に、複数の搬送車200のうちのいずれかの搬送車200を向かわせるための搬送指令を送出する指令送出部127とを備える。
(もっと読む)
無人搬送システムおよび無人搬送車
【課題】パレットのバッテリ残量に影響されることなく、パレットからのデータ信号を無人搬送車で受信して走行することができる無人搬送システムおよび無人搬送車を提供すること。
【解決手段】無人搬送車1のハロゲンランプ7から光をパレット100の太陽電池パネル106へ出力することにより、パレット100の光データ通信器105を太陽電池パネル106から供給される電力によって駆動させて光データ信号を出力させ、その光データ信号が光データ通信器6に受信される。これにより、パレット100のバッテリ残量に影響されることなく、無人搬送車1の走行を制御させることができる。
(もっと読む)
トレイに荷積みおよび/または荷降ろしするためのシステムおよび方法
【課題】トレイに荷積みおよび/または荷降ろしするための新規なシステムと方法を提供すること。
【解決手段】このシステムは、トレイ搬送用の第1のコンベヤと、トレイを第1のコンベヤからストリップコンベヤまで搬送しかつトレイをストリップコンベヤ上へ下げるための降下装置と、リフトアウト装置とを備える。リフトアウト装置は、トレイをストリップコンベヤから第2のコンベヤまで搬送しかつストリップコンベヤからトレイを持ち上げる。トレイは、スロット内にストリップコンベヤのストリップを受け入れるためのスロットを含み、トレイをストリップコンベヤ上へ下げる間に、ストリップが垂直に配置され、トレイのスロットから垂直に出て、トレイをストリップコンベヤから持ち上げる間に、ストリップは垂直に配置され、トレイのスロットから垂直に出る。
(もっと読む)
1 - 10 / 324
[ Back to top ]