
荷電粒子線照射装置

【課題】 照射室内における被照射体の位置決め精度の向上が図られた荷電粒子線照射装
置を提供すること。
【解決手段】 照射室を構成する回転ガントリ103と、回転ガントリ103に取り付け
られると共に載置台105の回りに回転可能とされた荷電粒子線照射部1と、被照射体5
1から発生するガンマ線を検出する検出器30と、を備えている。検出器30は、回転ガ
ントリ103の回転軸X方向に移動可能とされると共に、回転ガントリ103の背面パネ
ルより背面側に収納可能とされている。
置を提供すること。
【解決手段】 照射室を構成する回転ガントリ103と、回転ガントリ103に取り付け
られると共に載置台105の回りに回転可能とされた荷電粒子線照射部1と、被照射体5
1から発生するガンマ線を検出する検出器30と、を備えている。検出器30は、回転ガ
ントリ103の回転軸X方向に移動可能とされると共に、回転ガントリ103の背面パネ
ルより背面側に収納可能とされている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被照射体を載置した載置台を照射室内の所定の位置に配置して、被照射体へ
荷電粒子線を照射する荷電粒子線照射装置に関する。
【背景技術】
【0002】
従来、荷電粒子線を照射する荷電粒子線照射装置として、例えば陽子線を照射して腫瘍
を治療する陽子線治療装置が知られている。このような腫瘍の治療では、腫瘍の形状や位
置に応じて、絶対線量、線量分布、照射位置等の照射計画を立案し、この照射計画に従っ
て精度良く荷電粒子線の照射を行う必要がある。陽子線を患者に照射する場合には、重要
臓器、脳幹、視神経、脊髄等への照射を避けるため、照射位置の精度は特に重要である。
そして、このような腫瘍の治療に適用される陽子線治療装置は、患者回りに回転自在な陽
子線照射部を有する照射室(回転ガントリ)を備えることで、陽子線照射部の移動の自由
度が向上されている(例えば、特許文献1参照)。
【特許文献1】特開平11−47287号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ここで、近年、荷電粒子線照射装置では、荷電粒子線の照射位置の精度の向上が望まれ
、照射室内における被照射体の位置決め精度の向上が求められている。
【0004】
本発明は、このような課題を解決するために成されたものであり、照射室内における被
照射体の位置決め精度の向上を図った荷電粒子線照射装置を提供することである。
【課題を解決するための手段】
【0005】
本発明による荷電粒子線照射装置は、被照射体を載置した載置台が照射室内の所定の位
置に配置されて、被照射体へ荷電粒子線の照射が行われる荷電粒子線照射装置において、
照射室を構成する回転ガントリと、回転ガントリに取り付けられると共に載置台の回りに
回転可能とされた荷電粒子線照射部と、被照射体から発生するガンマ線を検出する検出器
と、を備え、検出器は回転ガントリの回転軸方向に移動可能とされると共に回転ガントリ
の背面パネルより背面側に収納可能とされていることを特徴としている。
【0006】
このように構成された荷電粒子線照射装置によれば、検出器を適宜移動させることで、
検出器が荷電粒子線照射部の回転の妨げになることがない。更に、被照射体の回転ガント
リ内への搬入、搬出の際に検出器が邪魔にならない。
【発明の効果】
【0007】
このように本発明による荷電粒子線照射装置によれば、検出器を適宜移動させることで
、検出器が荷電粒子線照射部の回転の妨げになることがない。更に、被照射体の回転ガン
トリ内への搬入、搬出の際に検出器が邪魔にならない。
【図面の簡単な説明】
【0008】
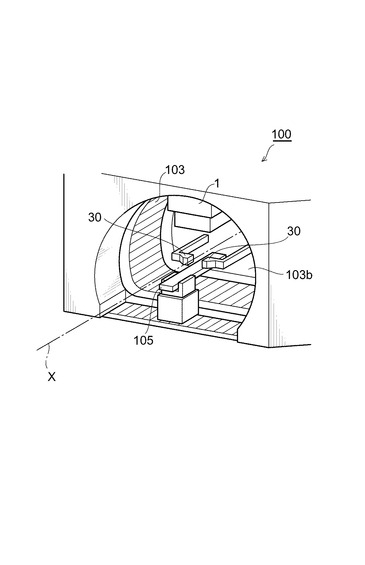
【図1】本発明の第1実施形態に係る陽子線治療装置を示す斜視図である。
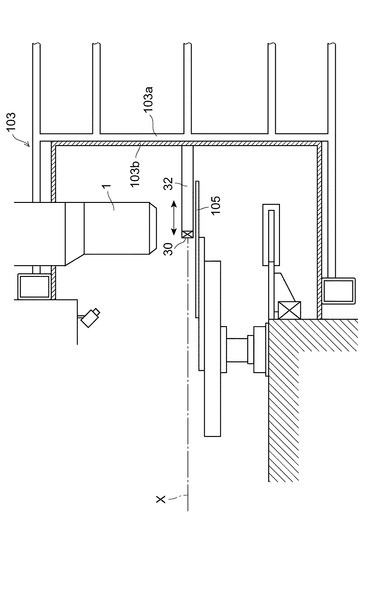
【図2】図1に示す陽子線治療装置の断面図である。
【図3】図1中の陽子線照射部を構成する各要素を示す図である。
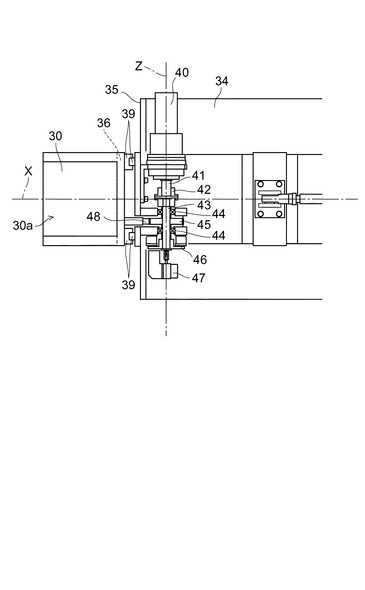
【図4】図1中のPETカメラ、及びPETカメラ支持部を示す平面図である。
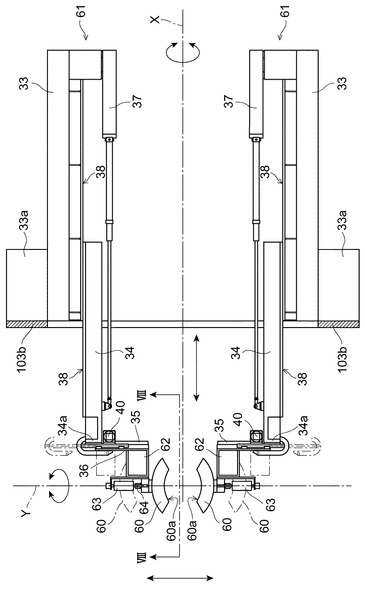
【図5】図4のV−V矢視図である。
【図6】本発明の実施形態に係る陽子線照射方法の工程を示すフロー図である。
【図7】本発明の第2実施形態に係る陽子線治療装置のPETカメラ、及びPETカ メラ支持部を示す平面図である。
【図8】図7のVIII−VIII矢視図である。
【発明を実施するための形態】
【0009】
以下、本発明による荷電粒子線照射装置の好適な第1実施形態について図1〜図5を参
照しながら説明する。なお、図面の説明において、同一または相当要素には同一の符号を
付し、重複する説明は省略する。本実施形態では、荷電粒子線照射装置を陽子線治療装置
とした場合について説明する。
【0010】
図1〜図3に示すように、陽子線治療装置100は、患者(被照射体)51の体内の腫
瘍(照射目標物)Pに対して陽子線(荷電粒子線)を照射する装置である。
【0011】
この陽子線治療装置100は、回転ガントリ103(照射室)に取り付けられて治療台
(載置台)105の回りに回転可能とされた陽子線照射部(荷電粒子線照射部)1を備え
ている。
【0012】
この陽子線照射部1は、図3に示すように、陽子線の照射方向Aに順に配列され、陽子
線ビームを順に通過させてビームを整形する散乱体5、リッジフィルタ部7、ファインデ
ィグレーダ9、ブロックコリメータ11、ボーラス13、マルチリーフコリメータ15、
装置各部の駆動を制御する照射制御部17を備えている。
【0013】
この陽子線照射部1には、陽子線発生部として機能するサイクロトロン3で発生した陽
子線が輸送装置を通じて送り込まれる。そして、送り込まれた細い陽子線を、例えば厚さ
数mmの鉛からなる散乱体(ビーム拡大部)5を通過させることによって、照射方向Aに
直交する方向に広がりを持たせて、幅広いビームに拡大する。
【0014】
上記散乱体5からの陽子線ビームは、患者51体内の腫瘍Pの厚み(照射方向Aの長さ
)に対応して陽子線のエネルギー深さに分布を持たせるためのリッジフィルタ部(ピーク
調整フィルタ部)7に入射される。このリッジフィルタ部7は、階段状に厚みの変化する
金属棒が簾状に並べられてなるフィルタ7aを複数有しており、それら複数のフィルタ7
aは、金属棒の形状の相違により互いに異なる陽子線の拡大ブラッグピーク(以下「SO
BP」という)を形成させる。そして、リッジフィルタ部7は、照射制御部17の制御に
より駆動され、上記複数のフィルタ7aの中から適宜選択されたフィルタを陽子線の通過
位置に挿入する機構を有している。この構成により、リッジフィルタ部7は、陽子線を通
過させるフィルタ7aを選択的に変更可能であり、陽子線のSOBPのピークの幅及び位
置を調整することができる。
【0015】
このリッジフィルタ部7を通過した陽子線は、治療対象である患者体内51の腫瘍Pの
深さに応じてビームのエネルギーを調整し、最大到達深さを調整するためのファインディ
グレーダ(ビームエネルギー調整部)9に入射される。このファインディグレーダ9は、
例えば2個の楔型をした対向するアクリルブロック9a、9bから構成され、照射制御部
17の制御により上記ブロック9a、9bの重なり方を調節することによって、陽子線が
通過する部分の厚みを連続的に変化させることができる。陽子線は、通過した物質の厚み
に応じてエネルギーを失い、患者51体内において到達する深さが変わるので、このファ
インディグレーダ9の調節により、陽子線のSOBPの位置を、患者51体内における腫
瘍Pの深さ方向(照射方向A)の位置に合わせることができる。
【0016】
このファインディグレーダ9を通過した陽子線ビームは、陽子線の平面形状(照射方向
Aから見た形状)を粗く整形するためのブロックコリメータ11に入射される。後述する
マルチリーフコリメータ15に加えて、ここで、ブロックコリメータ11による整形を行
っているのは、患者の近くでブロックコリメータ11による2次放射線が発生しないよう
にするためである。
【0017】
このブロックコリメータ11を通過した陽子線は、例えば樹脂製の不整形フィルタであ
るボーラス(補償フィルタ)13に入力され、腫瘍Pの最大深さの断面形状と組織の不均
一性に関する補正が行われる。このボーラス13の形状は、腫瘍の輪郭線と、例えばX線
CTのデータから求められる周辺組織の電子密度とに基づいて、算出される。このような
ボーラス13を用いることにより、陽子線ビームの最遠部(最大到達深さの部分)の立体
形状が、腫瘍Pの最大深さ部分の形状に合わせて整形されるので腫瘍Pに対する線量集中
性を更に高めることができる。
【0018】
このボーラス13を通過した陽子線ビームは、マルチリーフコリメータ(形状可変コリ
メータ)15に入射される。マルチリーフコリメータ15は、真鍮製で幅数mmの多数の
櫛歯をもつ2つの遮線部15a,15bが、上記櫛歯の先端を中心で突き合わせるように
配列されて構成されている。そして、照射制御部17の制御により、遮線部15a,15
bが、多数の上記櫛歯のそれぞれを長手方向に進退させることで、マルチリーフコリメー
タ15は、陽子線ビームが通過する開口15cの位置及び形状を変化させることができる
。
【0019】
マルチリーフコリメータ15を通過した陽子線ビームは、上記開口15cの形状に対応
する輪郭に切り取られるので、マルチリーフコリメータ15は、開口15cの形状を変化
させることで、入射する陽子線ビームの所望の平面位置及び平面形状を切り出すことがで
きる。このように所望の平面位置において所望の平面形状に切り出された陽子線ビームは
、治療用陽子線として患者51に照射される。そして、マルチコリメータ15の開口15
cの平面位置及び平面形状を変化させて照射野の位置を順次水平方向(照射方向Aに直交
する方向)に移動しながら照射を繰り返すことで、腫瘍P全体に陽子線ビームを照射する
。
【0020】
更に、この1陽子線照射部1は、照射野に照射された照射線量をモニタする手段として
、線量モニタ23を備えている。線量モニタ23は、ファインディグレーダ9とブロック
コリメータ11との間に設けられ、通過する陽子線の線量を検知する。線量モニタ23は
、検知した線量をモニタ信号s1として照射制御部17に送信し、照射制御部17はモニ
タ信号s1に基づいて照射野に照射された照射線量を認識することができる。
【0021】
また、陽子線治療装置100には、患者51のX線透視画像取得するX線撮影装置(X
線透視画像取得手段)が設けられている。このX線撮影装置は、X線発生器、患者51を
透過したX線を検出するX線検出器を備えている。これらのX線発生器及びX線検出器は
、回転ガントリ103に固定され、患者51回りに回転可能とされている。本実施形態で
は、二つのX線発生器を備え、これらのX線発生装置は、90度異なる位置に配置されて
いる。また、X線発生器に対向する位置に、X線検出器が配置されている。X線撮影装置
は、X線検出器によって検出されたデータに基づいて、患者51のX線透視画像を作成し
、骨、金属マーカーを検出して患者51の位置を測定することができる。
【0022】
ここで、陽子線治療装置100は、回転ガントリ103に取り付けられて治療台105
の回りに回転可能とされた一対のPETカメラ(第1の検出器、第2の検出器)30を有
するPET装置31を備えている。すなわち、PETカメラ30は、回転ガントリ103
に取付けられた陽子線照射部1と一体としてX軸回りに回転可能とされている。PET装
置31は、PETカメラ30の他に、図示していない画像処理部、記録部、表示部等を備
えている。画像処理部は、PETカメラ30によって取得された画像情報に基づいて画像
処理を行いPET画像を生成する。記録部は、生成されたPET画像等を記録する。生成
されたPET画像は、表示部により表示される。
【0023】
このPETカメラ30は、治療台105上の患者51の両側に配置され、消滅γ線を検
出するものである。具体的には、患者51には腫瘍Pに集積する放射性薬剤(例えば、1
1Cメチオニン)が投与(注入)され、PETカメラ30は、腫瘍P(放射性薬剤の到達
位置)から発生する消滅γ線を検出する。PET装置31は、PETカメラ30による消
滅γ線の検出結果に基づいて腫瘍Pの位置を検出する照射目標位置検出手段として機能す
るものである。
【0024】
また、PETカメラ30は、患者51に照射された陽子線の入射陽子核と腫瘍P内の原
子核との核反応によって生成されたポジトロン放出核からの消滅γ線を検出することがで
きる。更に、PET装置31は、PETカメラ30による消滅γ線の検出結果に基づいて
実際に照射された陽子線の患者51の体内における到達位置を検出する陽子線(荷電粒子
線)到達位置検出手段として機能するものである。すなわち、PET装置31は、治療で
用いる陽子線の入射陽子核と患者51の体内中の原子核との相互核反応により体内中で生
成されるポジトロン放出核種から消滅γ線を計測し生成核種ごとの強度分布を測定するこ
とで、患者51体内における実際の陽子線到達位置を検出することができる。
【0025】
PETカメラ30は、図4に示すように、回転ガントリ103の回転中心軸X(以下、
「X軸」という。)方向に移動可能とされると共に、X軸と直交するY軸方向に移動可能
とされている。一対のPETカメラ30を各々支持するPETカメラ支持部32は、X軸
方向に延在する支持部材33と、この支持部材33に沿ってX軸方向に移動するX軸方向
移動部材34と、このX軸方向移動部材34の先端部34aに設けられY軸方向に延在す
るY軸方向延在部材35と、このY軸方向延在部材35に沿ってY軸方向に移動するY軸
方向移動部材36とを有している。そして、PETカメラ30は、Y軸方向移動部材36
に固定され、その検出面30aが互いに対向するように配置されている。
【0026】
支持部材33には、Y軸方向における外方に張り出す張出部33aが形成され、この張
出部33aが回転ガントリ103のフレーム103a(図2参照)に固定されている。ま
た、支持部材33は、回転ガントリ103の背面パネル103bの背面側(図示右側)に
配置されている。支持部材33及びX軸方向移動部材34には、X軸方向移動部材34が
移動する方向を案内するスライドガイド38が形成され、X軸方向移動部材34は、スラ
イドガイド38を介してX軸方向に移動可能に支持されている。そして、X軸方向移動部
材34は、支持部材33に固定されたエアシリンダ37によって駆動され、X軸方向に往
復動可能とされている。
【0027】
Y軸方向延在部材35及びY軸方向移動部材36には、図5に示すように、Y軸方向移
動部材36が移動する方向を案内するスライドガイド39が設置され、Y軸方向移動部材
36は、スライドガイド39を介してY軸方向に移動可能に支持されている。そして、Y
軸方向移動部材36は、Y軸方向延在部材35に固定されたモータ40によって駆動され
、Y軸方向に往復動可能とされている。
【0028】
モータ40は、その出力軸41がX軸及びY軸に直交するZ軸方向(図5における上下
方向)に延在するように配置されている。出力軸41は、カップリング42を介して、Z
軸方向に延在する駆動軸43に接続されている。駆動軸43は、一対の軸受け44によっ
てY軸方向延在部材35に回転可能に支持されている。駆動軸43の一対の軸受け44間
には、ギア45が設けられている。また、駆動軸43のカップリング42と反対側の端部
には、ブレーキ46及び、ポテンションメータ47が設置されている。
【0029】
また、Y軸方向移動部材36には、ギア45と噛み合うラック48がY軸方向に形成さ
れている。そして、モータ40を回転駆動することで、ギア45及びラック48によって
駆動力が伝達され、Y軸方向移動部材36がY軸方向に往復動する。これにより、PET
カメラ30を患者51に対して接近させることができる。患者に接近させてPETカメラ
30を配置することで、消滅γ線の検出精度が向上される。
【0030】
このPETカメラ30は、回転ガントリ103の背面パネル103bより背面側に収納
可能とされ、計測時には、エアシリンダ37によって駆動されて、患者51の両側に配置
される。
【0031】
また、陽子線治療装置100は、治療台105の位置調整を行う治療台位置制御部(載
置台制御部)を有している。そして、この治療台位置制御部は、PET装置31によって
取得されたPET画像、X線撮影装置によって取得されたX線透視画像に基づいて、治療
台105の位置を制御するものであり、治療台105上の患者51の腫瘍Pに陽子線が照
射されるように、治療台105の位置を調整する。
【0032】
照射制御部17は、患者51の腫瘍Pの立体形状に基づいて作成された腫瘍マップ(目
標物マップ)19に格納された情報を参照しながら、特に、リッジフィルタ部7、ファイ
ンディグレーダ9、及びマルチリーフコリメータ15の動作を制御するものである。また
、ここでは、照射野の最遠部の形状が、腫瘍の最大深さ部分の複雑な形状に対応して整形
されるように、予め準備されたボーラス13が、所定の位置にセットされている。
【0033】
さらに、照射制御部17は、PET装置によって検出された陽子線の到達位置に応じて
、陽子線のビーム調整を行う。すなわち、照射制御部17は、患者51体内における陽子
線の実際の到達位置と腫瘍Pの位置とが一致するように、リッジフィルタ部7、ファイン
ディグレーダ9、及びマルチリーフコリメータ15の動作を制御して陽子線のビームを調
整する。
【0034】
次に、このように構成された陽子線治療装置100を用いた陽子線照射方法(荷電粒子
線照射方法)について説明する。
【0035】
陽子線治療装置100を使用していないときには、PETカメラ30は、背面パネル1
03bの背面側に収納され状態となっている。ここでは、一例として、脳腫瘍の患者に対
する陽子線治療について説明する。まず、回転ガントリ103内の治療台105上に患者
51を寝かせる。患者51の長手方向が、X軸方向に沿うように配置されている。次に、
患者51に11Cメチオニンを投与し(S1)、脳腫瘍に11Cメチオニンが集積するの
を待つ(S2)。続いて、脳腫瘍に集積した11Cメチオニンから放出される消滅γ線を
PETカメラ30によって測定する(第1の検出工程、S3)。このとき、エアシリンダ
37を駆動して、PETカメラ30をX軸方向に移動させて患者51の両側に配置し、モ
ータ40を駆動してPETカメラ30をY軸方向に移動させて、PETカメラ30同士の
間隔を調節する。3次元画像測定を行う場合には、回転ガントリ103を回転させて、消
滅γ線の計測を行う。
【0036】
次に、PETカメラ30による測定結果に基づいて、PET画像を作成して脳腫瘍の位
置を検出する(照射目標位置検出工程、S4)。続いて、X線撮影装置によって透視撮影
を行い患者51のX線画像を作成して(X線透視画像取得工程)、骨及び金属マーカーの
位置を確認する。なお、PET撮影及びX線撮影の順序を入れ替えてもよく、交互に複数
回撮影を行っても良い。また、必要に応じて、回転ガントリ103を回転させて、X線発
生器、X線検出器の位置を変える。
【0037】
次に、PET画像とX線画像に基づいて、照射計画を立案する(S6)。ここでは、照
射計画として、例えば、絶対線量、線量分布、患者51の位置等を決定する。続いて、決
定された照射計画に基づいて、治療台105の位置調整を行い(載置台位置調整工程、S
7)、患者51を適切な位置に配置する。
【0038】
次に、決定された照射計画に従ってビーム調整を行い、必要に応じて回転ガントリ10
3を回転させて、陽子線照射部1の位置を変更し、腫瘍に向けて陽子線を1回照射する(
S8)。そして、照射された陽子線と患者51体内の原子核との核反応によって生成され
たポジトロン放出核からの消滅γ線をPETカメラ30で測定する(第2の検出工程、S
9)。このとき、PETカメラ30同士が互いに接近するようにY軸方向に移動させ、P
ETカメラ30を患者51に近づけて、消滅γ線の検出を行う。また、PETカメラ30
を回転させて測定を行ってもよい。続いて、PETカメラ30による測定結果に基づいて
、PET画像を作成し患者51の体内における陽子線の到達位置を検出し、実際の照射野
を確認する(荷電粒子線到達位置検出工程、S10)。
【0039】
次に、実際に照射された陽子線の患者51体内における到達位置と、照射計画による照
射目標位置(腫瘍の位置)とを比較し、位置ずれがある場合には、陽子線が照射目標位置
の許容範囲内に照射されるようにビームの調整を行う(ビーム調整工程、S11)。ビー
ム調整終了後、陽子線を照射する(S12)。なお、再度、S8〜S11を実施してよい
。
【0040】
このような陽子線治療装置100によれば、回転ガントリ103にPETカメラ30が
設けられ、このPETカメラ30によって、照射された陽子線の入射陽子核と腫瘍内の原
子核との核反応により生成されるポジトロン放出核からの消滅γ線を計測することができ
るので、実際に照射された陽子線の到達位置を確認することができる。すなわち、治療中
に陽子線を照射しながら陽子線の到達位置を検出することができる。また、回転ガントリ
103にPETカメラ30が固定されているので、回転ガントリ103の回転に合わせて
、PETカメラ30を患者51回りに回転させることができ、陽子線を照射した直後に消
滅γ線の測定を行うことができる。また、PETカメラ30の移動の自由度が向上される
と共に、小型化されたPETカメラ30を用いて3次元測定を行うことができ、PETカ
メラ30用の別の回転駆動部を設ける必要もない。また、PETカメラ30が陽子線照射
部1に同期して回転するので、PETカメラ30と陽子線照射部1との回転方向における
位置関係を維持しながら、消滅γ線の検出を行うことが可能とされている。
【0041】
また、PETカメラ30は、X軸方向に移動可能であると共に、回転ガントリ103の
背面パネル103bの背面側に収納可能とされている。このようにPETカメラ30をX
軸方向に移動させることで、PETカメラ30による検出範囲の拡大することができる。
また、PETカメラ30を適宜移動させることで、PETカメラ30が陽子線照射部1の
回転の妨げになることがない。さらに、患者51の回転ガントリ103内への搬入、搬出
の際にPETカメラ30が邪魔にならない。また、被照射体の大きさに合わせて、PET
カメラ30を移動させることもできるので、所望の部位の照射位置の確認が容易になる。
【0042】
また、PETカメラ30が患者51を挟み込む方向(Y軸方向)に移動可能であり、P
ETカメラ30間の距離を任意に変えることが可能とされているので、PETカメラ30
をY軸方向に患者51に接近させることで、消滅γ線の検出精度を向上させることができ
る。
【0043】
また、従来、例えば脳腫瘍の放射線治療では、患者の位置決めを高精度で実現すべく、
患者の頭部を、固定具を用いて固定していたため、患者にとって大きな負担となっていた
。本発明による陽子線照射装置及び陽子線照射方法では、照射室内において、患者51を
治療台105に寝かせた状態でPETカメラ30を用いて腫瘍の位置確認を行うことがで
き、腫瘍位置と実際に照射された陽子線の到達位置との位置ずれを修正し、適切な位置に
患者51を位置決めすることができる。これにより、患者の位置決めを高い精度で行うこ
とができるため、患者の固定の簡素化が図られ、患者への負担を軽減することができる。
【0044】
次に、本発明の第2実施形態に係る陽子線治療装置について、図7及び図8を参照しな
がら説明する。この第2実施形態の陽子線治療装置が第1実施形態の陽子線治療装置10
0と違う点は、第2実施形態のPETカメラ60は更にY軸回りに回転可能である点、及
びPETカメラ60の検出面60aの形状が異なる点である。
【0045】
PETカメラ60を支持するPETカメラ支持部61は、Y軸方向移動部材36の内側
の端部36aにPETカメラ60を固定するカメラ固定部62を備えている。このカメラ
固定部62には、PETカメラ60を回転駆動するモータ63が取り付けられている。こ
のモータ63は、その出力軸64がY軸方向に沿って配置されている。そして、モータ6
3の出力軸64にPETカメラ60が接続されY軸回りに回転可能とされている。
【0046】
PETカメラ60の検出面60aは、円弧状に湾曲し、一対の検出面60aは互いに対
向して配置されている。PETカメラ60は、収納時、及びX軸方向への移動の際には、
その長手方向がX軸方向に沿うように配置される(図9に示す状態)。また、γ線の計測
時には、PETカメラ60は、円弧の中心軸がX軸方向と平行になる様に配置される。な
お、X軸方向と平行にならない位置でPETカメラ60の回転を停止させ、様々な角度か
らの測定も可能である。
【0047】
このように構成しても第1実施形態の陽子線治療装置100と同様の効果を得ることが
でき、加えて、PETカメラ60がY軸回りに回転可能であるため、PETカメラ60の
移動の自由度が一層向上され、様々な方向から照射位置の測定を行うことができ、測定精
度の向上が図られている。
【0048】
本発明は、上記実施形態に限定されるものではない。上記実施形態では、PETカメラ
がX軸回りに回転可能な構成とされているが、X軸回りに回転しない構成でもよく、その
他の方向に回転可能な構成としてもよい。また、PETカメラが互いに接近する方向に移
動可能な構成とされているが、PETカメラは互いに接近する方向に移動しない構成とし
てもよい。また、エアシリンダ、モータを用いて、PETカメラを移動させているが、油
圧シリンダ等その他の駆動装置を用いてPETカメラを移動させてもよい。また、PET
カメラのX軸方向の移動、Y軸方向の移動は、直線状に移動しなくてもよく、曲線状、円
弧状に移動してもよい。
【0049】
また、上記実施形態では、PETカメラは、回転ガントリに取り付けられ、陽子線照射
部と一体としてX軸回りに回転可能とされているが、PETカメラは回転ガントリ及び陽
子線照射部と一体として回転しなくてもよい。例えば、PETカメラを回転駆動させるた
めの駆動装置を別に設けて、回転ガントリ及び陽子線照射部の回転に追従するようにPE
Tカメラを回転させてもよく、回転ガントリ及び陽子線照射部の回転と無関係にPETカ
メラを回転させてもよい。
【0050】
また、上記実施形態では、X線装置を備え、X線撮影を実施しているが、X線撮影を省
略してもよい。また、上記実施形態では、放射性薬剤をメチオニンとしているが、照射目
標物に応じて、その他の放射性薬剤を適用してもよい。また、上記実施形態では、脳腫瘍
について、説明しているが、その他の腫瘍に対して適用してもよい。
【0051】
また、上記実施形態では、陽子線を照射する陽子線照射装置に本発明を適用しているが
、本発明は、炭素線照射装置等の他の荷電粒子線照射装置にも適用が可能である。
【0052】
また、上記実施形態では、第1の検出器及び第2の検出器を同一のPETカメラとして
いるが、別々のPETカメラを備える構成としても良い。
【符号の説明】
【0053】
1…陽子線照射部(荷電粒子線照射部)、17…照射制御部、30…PETカメラ(第
1の検出器、第2の検出器)、51…患者(被照射体)、100…陽子線治療装置、10
3…回転ガントリ(照射室)、105…治療台(載置台)、P…腫瘍(照射目標物)、X
…X軸方向、Y…Y軸方向。
【技術分野】
【0001】
本発明は、被照射体を載置した載置台を照射室内の所定の位置に配置して、被照射体へ
荷電粒子線を照射する荷電粒子線照射装置に関する。
【背景技術】
【0002】
従来、荷電粒子線を照射する荷電粒子線照射装置として、例えば陽子線を照射して腫瘍
を治療する陽子線治療装置が知られている。このような腫瘍の治療では、腫瘍の形状や位
置に応じて、絶対線量、線量分布、照射位置等の照射計画を立案し、この照射計画に従っ
て精度良く荷電粒子線の照射を行う必要がある。陽子線を患者に照射する場合には、重要
臓器、脳幹、視神経、脊髄等への照射を避けるため、照射位置の精度は特に重要である。
そして、このような腫瘍の治療に適用される陽子線治療装置は、患者回りに回転自在な陽
子線照射部を有する照射室(回転ガントリ)を備えることで、陽子線照射部の移動の自由
度が向上されている(例えば、特許文献1参照)。
【特許文献1】特開平11−47287号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ここで、近年、荷電粒子線照射装置では、荷電粒子線の照射位置の精度の向上が望まれ
、照射室内における被照射体の位置決め精度の向上が求められている。
【0004】
本発明は、このような課題を解決するために成されたものであり、照射室内における被
照射体の位置決め精度の向上を図った荷電粒子線照射装置を提供することである。
【課題を解決するための手段】
【0005】
本発明による荷電粒子線照射装置は、被照射体を載置した載置台が照射室内の所定の位
置に配置されて、被照射体へ荷電粒子線の照射が行われる荷電粒子線照射装置において、
照射室を構成する回転ガントリと、回転ガントリに取り付けられると共に載置台の回りに
回転可能とされた荷電粒子線照射部と、被照射体から発生するガンマ線を検出する検出器
と、を備え、検出器は回転ガントリの回転軸方向に移動可能とされると共に回転ガントリ
の背面パネルより背面側に収納可能とされていることを特徴としている。
【0006】
このように構成された荷電粒子線照射装置によれば、検出器を適宜移動させることで、
検出器が荷電粒子線照射部の回転の妨げになることがない。更に、被照射体の回転ガント
リ内への搬入、搬出の際に検出器が邪魔にならない。
【発明の効果】
【0007】
このように本発明による荷電粒子線照射装置によれば、検出器を適宜移動させることで
、検出器が荷電粒子線照射部の回転の妨げになることがない。更に、被照射体の回転ガン
トリ内への搬入、搬出の際に検出器が邪魔にならない。
【図面の簡単な説明】
【0008】
【図1】本発明の第1実施形態に係る陽子線治療装置を示す斜視図である。
【図2】図1に示す陽子線治療装置の断面図である。
【図3】図1中の陽子線照射部を構成する各要素を示す図である。
【図4】図1中のPETカメラ、及びPETカメラ支持部を示す平面図である。
【図5】図4のV−V矢視図である。
【図6】本発明の実施形態に係る陽子線照射方法の工程を示すフロー図である。
【図7】本発明の第2実施形態に係る陽子線治療装置のPETカメラ、及びPETカ メラ支持部を示す平面図である。
【図8】図7のVIII−VIII矢視図である。
【発明を実施するための形態】
【0009】
以下、本発明による荷電粒子線照射装置の好適な第1実施形態について図1〜図5を参
照しながら説明する。なお、図面の説明において、同一または相当要素には同一の符号を
付し、重複する説明は省略する。本実施形態では、荷電粒子線照射装置を陽子線治療装置
とした場合について説明する。
【0010】
図1〜図3に示すように、陽子線治療装置100は、患者(被照射体)51の体内の腫
瘍(照射目標物)Pに対して陽子線(荷電粒子線)を照射する装置である。
【0011】
この陽子線治療装置100は、回転ガントリ103(照射室)に取り付けられて治療台
(載置台)105の回りに回転可能とされた陽子線照射部(荷電粒子線照射部)1を備え
ている。
【0012】
この陽子線照射部1は、図3に示すように、陽子線の照射方向Aに順に配列され、陽子
線ビームを順に通過させてビームを整形する散乱体5、リッジフィルタ部7、ファインデ
ィグレーダ9、ブロックコリメータ11、ボーラス13、マルチリーフコリメータ15、
装置各部の駆動を制御する照射制御部17を備えている。
【0013】
この陽子線照射部1には、陽子線発生部として機能するサイクロトロン3で発生した陽
子線が輸送装置を通じて送り込まれる。そして、送り込まれた細い陽子線を、例えば厚さ
数mmの鉛からなる散乱体(ビーム拡大部)5を通過させることによって、照射方向Aに
直交する方向に広がりを持たせて、幅広いビームに拡大する。
【0014】
上記散乱体5からの陽子線ビームは、患者51体内の腫瘍Pの厚み(照射方向Aの長さ
)に対応して陽子線のエネルギー深さに分布を持たせるためのリッジフィルタ部(ピーク
調整フィルタ部)7に入射される。このリッジフィルタ部7は、階段状に厚みの変化する
金属棒が簾状に並べられてなるフィルタ7aを複数有しており、それら複数のフィルタ7
aは、金属棒の形状の相違により互いに異なる陽子線の拡大ブラッグピーク(以下「SO
BP」という)を形成させる。そして、リッジフィルタ部7は、照射制御部17の制御に
より駆動され、上記複数のフィルタ7aの中から適宜選択されたフィルタを陽子線の通過
位置に挿入する機構を有している。この構成により、リッジフィルタ部7は、陽子線を通
過させるフィルタ7aを選択的に変更可能であり、陽子線のSOBPのピークの幅及び位
置を調整することができる。
【0015】
このリッジフィルタ部7を通過した陽子線は、治療対象である患者体内51の腫瘍Pの
深さに応じてビームのエネルギーを調整し、最大到達深さを調整するためのファインディ
グレーダ(ビームエネルギー調整部)9に入射される。このファインディグレーダ9は、
例えば2個の楔型をした対向するアクリルブロック9a、9bから構成され、照射制御部
17の制御により上記ブロック9a、9bの重なり方を調節することによって、陽子線が
通過する部分の厚みを連続的に変化させることができる。陽子線は、通過した物質の厚み
に応じてエネルギーを失い、患者51体内において到達する深さが変わるので、このファ
インディグレーダ9の調節により、陽子線のSOBPの位置を、患者51体内における腫
瘍Pの深さ方向(照射方向A)の位置に合わせることができる。
【0016】
このファインディグレーダ9を通過した陽子線ビームは、陽子線の平面形状(照射方向
Aから見た形状)を粗く整形するためのブロックコリメータ11に入射される。後述する
マルチリーフコリメータ15に加えて、ここで、ブロックコリメータ11による整形を行
っているのは、患者の近くでブロックコリメータ11による2次放射線が発生しないよう
にするためである。
【0017】
このブロックコリメータ11を通過した陽子線は、例えば樹脂製の不整形フィルタであ
るボーラス(補償フィルタ)13に入力され、腫瘍Pの最大深さの断面形状と組織の不均
一性に関する補正が行われる。このボーラス13の形状は、腫瘍の輪郭線と、例えばX線
CTのデータから求められる周辺組織の電子密度とに基づいて、算出される。このような
ボーラス13を用いることにより、陽子線ビームの最遠部(最大到達深さの部分)の立体
形状が、腫瘍Pの最大深さ部分の形状に合わせて整形されるので腫瘍Pに対する線量集中
性を更に高めることができる。
【0018】
このボーラス13を通過した陽子線ビームは、マルチリーフコリメータ(形状可変コリ
メータ)15に入射される。マルチリーフコリメータ15は、真鍮製で幅数mmの多数の
櫛歯をもつ2つの遮線部15a,15bが、上記櫛歯の先端を中心で突き合わせるように
配列されて構成されている。そして、照射制御部17の制御により、遮線部15a,15
bが、多数の上記櫛歯のそれぞれを長手方向に進退させることで、マルチリーフコリメー
タ15は、陽子線ビームが通過する開口15cの位置及び形状を変化させることができる
。
【0019】
マルチリーフコリメータ15を通過した陽子線ビームは、上記開口15cの形状に対応
する輪郭に切り取られるので、マルチリーフコリメータ15は、開口15cの形状を変化
させることで、入射する陽子線ビームの所望の平面位置及び平面形状を切り出すことがで
きる。このように所望の平面位置において所望の平面形状に切り出された陽子線ビームは
、治療用陽子線として患者51に照射される。そして、マルチコリメータ15の開口15
cの平面位置及び平面形状を変化させて照射野の位置を順次水平方向(照射方向Aに直交
する方向)に移動しながら照射を繰り返すことで、腫瘍P全体に陽子線ビームを照射する
。
【0020】
更に、この1陽子線照射部1は、照射野に照射された照射線量をモニタする手段として
、線量モニタ23を備えている。線量モニタ23は、ファインディグレーダ9とブロック
コリメータ11との間に設けられ、通過する陽子線の線量を検知する。線量モニタ23は
、検知した線量をモニタ信号s1として照射制御部17に送信し、照射制御部17はモニ
タ信号s1に基づいて照射野に照射された照射線量を認識することができる。
【0021】
また、陽子線治療装置100には、患者51のX線透視画像取得するX線撮影装置(X
線透視画像取得手段)が設けられている。このX線撮影装置は、X線発生器、患者51を
透過したX線を検出するX線検出器を備えている。これらのX線発生器及びX線検出器は
、回転ガントリ103に固定され、患者51回りに回転可能とされている。本実施形態で
は、二つのX線発生器を備え、これらのX線発生装置は、90度異なる位置に配置されて
いる。また、X線発生器に対向する位置に、X線検出器が配置されている。X線撮影装置
は、X線検出器によって検出されたデータに基づいて、患者51のX線透視画像を作成し
、骨、金属マーカーを検出して患者51の位置を測定することができる。
【0022】
ここで、陽子線治療装置100は、回転ガントリ103に取り付けられて治療台105
の回りに回転可能とされた一対のPETカメラ(第1の検出器、第2の検出器)30を有
するPET装置31を備えている。すなわち、PETカメラ30は、回転ガントリ103
に取付けられた陽子線照射部1と一体としてX軸回りに回転可能とされている。PET装
置31は、PETカメラ30の他に、図示していない画像処理部、記録部、表示部等を備
えている。画像処理部は、PETカメラ30によって取得された画像情報に基づいて画像
処理を行いPET画像を生成する。記録部は、生成されたPET画像等を記録する。生成
されたPET画像は、表示部により表示される。
【0023】
このPETカメラ30は、治療台105上の患者51の両側に配置され、消滅γ線を検
出するものである。具体的には、患者51には腫瘍Pに集積する放射性薬剤(例えば、1
1Cメチオニン)が投与(注入)され、PETカメラ30は、腫瘍P(放射性薬剤の到達
位置)から発生する消滅γ線を検出する。PET装置31は、PETカメラ30による消
滅γ線の検出結果に基づいて腫瘍Pの位置を検出する照射目標位置検出手段として機能す
るものである。
【0024】
また、PETカメラ30は、患者51に照射された陽子線の入射陽子核と腫瘍P内の原
子核との核反応によって生成されたポジトロン放出核からの消滅γ線を検出することがで
きる。更に、PET装置31は、PETカメラ30による消滅γ線の検出結果に基づいて
実際に照射された陽子線の患者51の体内における到達位置を検出する陽子線(荷電粒子
線)到達位置検出手段として機能するものである。すなわち、PET装置31は、治療で
用いる陽子線の入射陽子核と患者51の体内中の原子核との相互核反応により体内中で生
成されるポジトロン放出核種から消滅γ線を計測し生成核種ごとの強度分布を測定するこ
とで、患者51体内における実際の陽子線到達位置を検出することができる。
【0025】
PETカメラ30は、図4に示すように、回転ガントリ103の回転中心軸X(以下、
「X軸」という。)方向に移動可能とされると共に、X軸と直交するY軸方向に移動可能
とされている。一対のPETカメラ30を各々支持するPETカメラ支持部32は、X軸
方向に延在する支持部材33と、この支持部材33に沿ってX軸方向に移動するX軸方向
移動部材34と、このX軸方向移動部材34の先端部34aに設けられY軸方向に延在す
るY軸方向延在部材35と、このY軸方向延在部材35に沿ってY軸方向に移動するY軸
方向移動部材36とを有している。そして、PETカメラ30は、Y軸方向移動部材36
に固定され、その検出面30aが互いに対向するように配置されている。
【0026】
支持部材33には、Y軸方向における外方に張り出す張出部33aが形成され、この張
出部33aが回転ガントリ103のフレーム103a(図2参照)に固定されている。ま
た、支持部材33は、回転ガントリ103の背面パネル103bの背面側(図示右側)に
配置されている。支持部材33及びX軸方向移動部材34には、X軸方向移動部材34が
移動する方向を案内するスライドガイド38が形成され、X軸方向移動部材34は、スラ
イドガイド38を介してX軸方向に移動可能に支持されている。そして、X軸方向移動部
材34は、支持部材33に固定されたエアシリンダ37によって駆動され、X軸方向に往
復動可能とされている。
【0027】
Y軸方向延在部材35及びY軸方向移動部材36には、図5に示すように、Y軸方向移
動部材36が移動する方向を案内するスライドガイド39が設置され、Y軸方向移動部材
36は、スライドガイド39を介してY軸方向に移動可能に支持されている。そして、Y
軸方向移動部材36は、Y軸方向延在部材35に固定されたモータ40によって駆動され
、Y軸方向に往復動可能とされている。
【0028】
モータ40は、その出力軸41がX軸及びY軸に直交するZ軸方向(図5における上下
方向)に延在するように配置されている。出力軸41は、カップリング42を介して、Z
軸方向に延在する駆動軸43に接続されている。駆動軸43は、一対の軸受け44によっ
てY軸方向延在部材35に回転可能に支持されている。駆動軸43の一対の軸受け44間
には、ギア45が設けられている。また、駆動軸43のカップリング42と反対側の端部
には、ブレーキ46及び、ポテンションメータ47が設置されている。
【0029】
また、Y軸方向移動部材36には、ギア45と噛み合うラック48がY軸方向に形成さ
れている。そして、モータ40を回転駆動することで、ギア45及びラック48によって
駆動力が伝達され、Y軸方向移動部材36がY軸方向に往復動する。これにより、PET
カメラ30を患者51に対して接近させることができる。患者に接近させてPETカメラ
30を配置することで、消滅γ線の検出精度が向上される。
【0030】
このPETカメラ30は、回転ガントリ103の背面パネル103bより背面側に収納
可能とされ、計測時には、エアシリンダ37によって駆動されて、患者51の両側に配置
される。
【0031】
また、陽子線治療装置100は、治療台105の位置調整を行う治療台位置制御部(載
置台制御部)を有している。そして、この治療台位置制御部は、PET装置31によって
取得されたPET画像、X線撮影装置によって取得されたX線透視画像に基づいて、治療
台105の位置を制御するものであり、治療台105上の患者51の腫瘍Pに陽子線が照
射されるように、治療台105の位置を調整する。
【0032】
照射制御部17は、患者51の腫瘍Pの立体形状に基づいて作成された腫瘍マップ(目
標物マップ)19に格納された情報を参照しながら、特に、リッジフィルタ部7、ファイ
ンディグレーダ9、及びマルチリーフコリメータ15の動作を制御するものである。また
、ここでは、照射野の最遠部の形状が、腫瘍の最大深さ部分の複雑な形状に対応して整形
されるように、予め準備されたボーラス13が、所定の位置にセットされている。
【0033】
さらに、照射制御部17は、PET装置によって検出された陽子線の到達位置に応じて
、陽子線のビーム調整を行う。すなわち、照射制御部17は、患者51体内における陽子
線の実際の到達位置と腫瘍Pの位置とが一致するように、リッジフィルタ部7、ファイン
ディグレーダ9、及びマルチリーフコリメータ15の動作を制御して陽子線のビームを調
整する。
【0034】
次に、このように構成された陽子線治療装置100を用いた陽子線照射方法(荷電粒子
線照射方法)について説明する。
【0035】
陽子線治療装置100を使用していないときには、PETカメラ30は、背面パネル1
03bの背面側に収納され状態となっている。ここでは、一例として、脳腫瘍の患者に対
する陽子線治療について説明する。まず、回転ガントリ103内の治療台105上に患者
51を寝かせる。患者51の長手方向が、X軸方向に沿うように配置されている。次に、
患者51に11Cメチオニンを投与し(S1)、脳腫瘍に11Cメチオニンが集積するの
を待つ(S2)。続いて、脳腫瘍に集積した11Cメチオニンから放出される消滅γ線を
PETカメラ30によって測定する(第1の検出工程、S3)。このとき、エアシリンダ
37を駆動して、PETカメラ30をX軸方向に移動させて患者51の両側に配置し、モ
ータ40を駆動してPETカメラ30をY軸方向に移動させて、PETカメラ30同士の
間隔を調節する。3次元画像測定を行う場合には、回転ガントリ103を回転させて、消
滅γ線の計測を行う。
【0036】
次に、PETカメラ30による測定結果に基づいて、PET画像を作成して脳腫瘍の位
置を検出する(照射目標位置検出工程、S4)。続いて、X線撮影装置によって透視撮影
を行い患者51のX線画像を作成して(X線透視画像取得工程)、骨及び金属マーカーの
位置を確認する。なお、PET撮影及びX線撮影の順序を入れ替えてもよく、交互に複数
回撮影を行っても良い。また、必要に応じて、回転ガントリ103を回転させて、X線発
生器、X線検出器の位置を変える。
【0037】
次に、PET画像とX線画像に基づいて、照射計画を立案する(S6)。ここでは、照
射計画として、例えば、絶対線量、線量分布、患者51の位置等を決定する。続いて、決
定された照射計画に基づいて、治療台105の位置調整を行い(載置台位置調整工程、S
7)、患者51を適切な位置に配置する。
【0038】
次に、決定された照射計画に従ってビーム調整を行い、必要に応じて回転ガントリ10
3を回転させて、陽子線照射部1の位置を変更し、腫瘍に向けて陽子線を1回照射する(
S8)。そして、照射された陽子線と患者51体内の原子核との核反応によって生成され
たポジトロン放出核からの消滅γ線をPETカメラ30で測定する(第2の検出工程、S
9)。このとき、PETカメラ30同士が互いに接近するようにY軸方向に移動させ、P
ETカメラ30を患者51に近づけて、消滅γ線の検出を行う。また、PETカメラ30
を回転させて測定を行ってもよい。続いて、PETカメラ30による測定結果に基づいて
、PET画像を作成し患者51の体内における陽子線の到達位置を検出し、実際の照射野
を確認する(荷電粒子線到達位置検出工程、S10)。
【0039】
次に、実際に照射された陽子線の患者51体内における到達位置と、照射計画による照
射目標位置(腫瘍の位置)とを比較し、位置ずれがある場合には、陽子線が照射目標位置
の許容範囲内に照射されるようにビームの調整を行う(ビーム調整工程、S11)。ビー
ム調整終了後、陽子線を照射する(S12)。なお、再度、S8〜S11を実施してよい
。
【0040】
このような陽子線治療装置100によれば、回転ガントリ103にPETカメラ30が
設けられ、このPETカメラ30によって、照射された陽子線の入射陽子核と腫瘍内の原
子核との核反応により生成されるポジトロン放出核からの消滅γ線を計測することができ
るので、実際に照射された陽子線の到達位置を確認することができる。すなわち、治療中
に陽子線を照射しながら陽子線の到達位置を検出することができる。また、回転ガントリ
103にPETカメラ30が固定されているので、回転ガントリ103の回転に合わせて
、PETカメラ30を患者51回りに回転させることができ、陽子線を照射した直後に消
滅γ線の測定を行うことができる。また、PETカメラ30の移動の自由度が向上される
と共に、小型化されたPETカメラ30を用いて3次元測定を行うことができ、PETカ
メラ30用の別の回転駆動部を設ける必要もない。また、PETカメラ30が陽子線照射
部1に同期して回転するので、PETカメラ30と陽子線照射部1との回転方向における
位置関係を維持しながら、消滅γ線の検出を行うことが可能とされている。
【0041】
また、PETカメラ30は、X軸方向に移動可能であると共に、回転ガントリ103の
背面パネル103bの背面側に収納可能とされている。このようにPETカメラ30をX
軸方向に移動させることで、PETカメラ30による検出範囲の拡大することができる。
また、PETカメラ30を適宜移動させることで、PETカメラ30が陽子線照射部1の
回転の妨げになることがない。さらに、患者51の回転ガントリ103内への搬入、搬出
の際にPETカメラ30が邪魔にならない。また、被照射体の大きさに合わせて、PET
カメラ30を移動させることもできるので、所望の部位の照射位置の確認が容易になる。
【0042】
また、PETカメラ30が患者51を挟み込む方向(Y軸方向)に移動可能であり、P
ETカメラ30間の距離を任意に変えることが可能とされているので、PETカメラ30
をY軸方向に患者51に接近させることで、消滅γ線の検出精度を向上させることができ
る。
【0043】
また、従来、例えば脳腫瘍の放射線治療では、患者の位置決めを高精度で実現すべく、
患者の頭部を、固定具を用いて固定していたため、患者にとって大きな負担となっていた
。本発明による陽子線照射装置及び陽子線照射方法では、照射室内において、患者51を
治療台105に寝かせた状態でPETカメラ30を用いて腫瘍の位置確認を行うことがで
き、腫瘍位置と実際に照射された陽子線の到達位置との位置ずれを修正し、適切な位置に
患者51を位置決めすることができる。これにより、患者の位置決めを高い精度で行うこ
とができるため、患者の固定の簡素化が図られ、患者への負担を軽減することができる。
【0044】
次に、本発明の第2実施形態に係る陽子線治療装置について、図7及び図8を参照しな
がら説明する。この第2実施形態の陽子線治療装置が第1実施形態の陽子線治療装置10
0と違う点は、第2実施形態のPETカメラ60は更にY軸回りに回転可能である点、及
びPETカメラ60の検出面60aの形状が異なる点である。
【0045】
PETカメラ60を支持するPETカメラ支持部61は、Y軸方向移動部材36の内側
の端部36aにPETカメラ60を固定するカメラ固定部62を備えている。このカメラ
固定部62には、PETカメラ60を回転駆動するモータ63が取り付けられている。こ
のモータ63は、その出力軸64がY軸方向に沿って配置されている。そして、モータ6
3の出力軸64にPETカメラ60が接続されY軸回りに回転可能とされている。
【0046】
PETカメラ60の検出面60aは、円弧状に湾曲し、一対の検出面60aは互いに対
向して配置されている。PETカメラ60は、収納時、及びX軸方向への移動の際には、
その長手方向がX軸方向に沿うように配置される(図9に示す状態)。また、γ線の計測
時には、PETカメラ60は、円弧の中心軸がX軸方向と平行になる様に配置される。な
お、X軸方向と平行にならない位置でPETカメラ60の回転を停止させ、様々な角度か
らの測定も可能である。
【0047】
このように構成しても第1実施形態の陽子線治療装置100と同様の効果を得ることが
でき、加えて、PETカメラ60がY軸回りに回転可能であるため、PETカメラ60の
移動の自由度が一層向上され、様々な方向から照射位置の測定を行うことができ、測定精
度の向上が図られている。
【0048】
本発明は、上記実施形態に限定されるものではない。上記実施形態では、PETカメラ
がX軸回りに回転可能な構成とされているが、X軸回りに回転しない構成でもよく、その
他の方向に回転可能な構成としてもよい。また、PETカメラが互いに接近する方向に移
動可能な構成とされているが、PETカメラは互いに接近する方向に移動しない構成とし
てもよい。また、エアシリンダ、モータを用いて、PETカメラを移動させているが、油
圧シリンダ等その他の駆動装置を用いてPETカメラを移動させてもよい。また、PET
カメラのX軸方向の移動、Y軸方向の移動は、直線状に移動しなくてもよく、曲線状、円
弧状に移動してもよい。
【0049】
また、上記実施形態では、PETカメラは、回転ガントリに取り付けられ、陽子線照射
部と一体としてX軸回りに回転可能とされているが、PETカメラは回転ガントリ及び陽
子線照射部と一体として回転しなくてもよい。例えば、PETカメラを回転駆動させるた
めの駆動装置を別に設けて、回転ガントリ及び陽子線照射部の回転に追従するようにPE
Tカメラを回転させてもよく、回転ガントリ及び陽子線照射部の回転と無関係にPETカ
メラを回転させてもよい。
【0050】
また、上記実施形態では、X線装置を備え、X線撮影を実施しているが、X線撮影を省
略してもよい。また、上記実施形態では、放射性薬剤をメチオニンとしているが、照射目
標物に応じて、その他の放射性薬剤を適用してもよい。また、上記実施形態では、脳腫瘍
について、説明しているが、その他の腫瘍に対して適用してもよい。
【0051】
また、上記実施形態では、陽子線を照射する陽子線照射装置に本発明を適用しているが
、本発明は、炭素線照射装置等の他の荷電粒子線照射装置にも適用が可能である。
【0052】
また、上記実施形態では、第1の検出器及び第2の検出器を同一のPETカメラとして
いるが、別々のPETカメラを備える構成としても良い。
【符号の説明】
【0053】
1…陽子線照射部(荷電粒子線照射部)、17…照射制御部、30…PETカメラ(第
1の検出器、第2の検出器)、51…患者(被照射体)、100…陽子線治療装置、10
3…回転ガントリ(照射室)、105…治療台(載置台)、P…腫瘍(照射目標物)、X
…X軸方向、Y…Y軸方向。
【特許請求の範囲】
【請求項1】
被照射体を載置した載置台が照射室内の所定位置に配置されて、前記被照射体へ荷電粒
子線の照射が行われる荷電粒子線照射装置において、
前記照射室を構成する回転ガントリと、
前記回転ガントリに取り付けられると共に、前記載置台の回りに回転可能とされた荷電
粒子線照射部と、
前記被照射体から発生するガンマ線を検出する検出器と、を備え、
前記検出器は、前記回転ガントリの回転軸方向に移動可能とされると共に、前記回転ガ
ントリの背面パネルより背面側に収納可能とされている
ことを特徴とする荷電粒子線照射装置。
【請求項1】
被照射体を載置した載置台が照射室内の所定位置に配置されて、前記被照射体へ荷電粒
子線の照射が行われる荷電粒子線照射装置において、
前記照射室を構成する回転ガントリと、
前記回転ガントリに取り付けられると共に、前記載置台の回りに回転可能とされた荷電
粒子線照射部と、
前記被照射体から発生するガンマ線を検出する検出器と、を備え、
前記検出器は、前記回転ガントリの回転軸方向に移動可能とされると共に、前記回転ガ
ントリの背面パネルより背面側に収納可能とされている
ことを特徴とする荷電粒子線照射装置。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】

【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−5888(P2012−5888A)
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願番号】特願2011−223669(P2011−223669)
【出願日】平成23年10月11日(2011.10.11)
【分割の表示】特願2007−9544(P2007−9544)の分割
【原出願日】平成19年1月18日(2007.1.18)
【出願人】(510097747)独立行政法人国立がん研究センター (35)
【出願人】(000002107)住友重機械工業株式会社 (2,241)
【Fターム(参考)】
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願日】平成23年10月11日(2011.10.11)
【分割の表示】特願2007−9544(P2007−9544)の分割
【原出願日】平成19年1月18日(2007.1.18)
【出願人】(510097747)独立行政法人国立がん研究センター (35)
【出願人】(000002107)住友重機械工業株式会社 (2,241)
【Fターム(参考)】
[ Back to top ]