
質量流量計及びコントローラの温度センサのための姿勢誤差自己訂正
通過して流れる流体の流量を表す流量測定信号を発生するのに用いられるために、流体が流量の共通軸に沿って流れる管に設置された少なくとも2つの温度センサ・コイルの姿勢感度を補償するシステム及び方法が開示される。前記コイルの中の1つは、ある上流位置において前記管を流れる流体に熱エネルギを提供し、前記上流位置における前記流体の上流温度を確立し測定するように構成され、前記コイルの中の1つは、ある下流位置における前記流体の下流温度を測定するように構成される。前記流量測定信号は、前記測定された上流温度と前記測定された下流温度との差の関数である。このシステムは、前記共通軸の方向の重力を測定するステップと、前記流量測定信号を前記測定された重力の関数として修正するステップとを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、質量流量(mass flow)の測定に関し、更に詳しくは、質量流量計及びコントローラの温度センサのための姿勢誤差自己訂正に関する。
【背景技術】
【0002】
様々な半導体プロセスには、製造工程中の製品に対して(通常は、気体又は蒸発した液体の形態で)提供される材料の量すなわち質量の慎重な制御が要求される。その結果、気体又は蒸気の質量流量を感知するために、流量センサとして知られている装置が開発されてきた。流量センサは、材料の流率を計測するように構成することができ、又は、制御装置と組み合わせて、製造工程中の製品に提供される材料の量を制御するように構成することができる。
【0003】
2つの一般的なタイプのセンサとして、圧力ベースのセンサと、温度ベースのセンサとがある。温度ベースのセンサは、熱伝達の原理(heat transfer principle)に基づいて動作する装置である。一般的な商用の形態では、毛細管サイズの寸法の小さな直径の管を備えていて、この管は、相互に近接する毛細管の外部に巻かれたワイヤで構成される2つのコイルを有する。これらのコイルは、温度感知性の抵抗値を有する、すなわち温度の関数である抵抗値を有する材料で作られている。毛細管の反対側の端部は、気体又は蒸気供給源とその気体又は蒸気が用いられる処理ステーションとの間で気体又は蒸気を移動させるより大きな管と流体的に連絡するようになっている。この大きい方の管のバイパスと称される部分の内部には、毛細管からより大きな管への上流接続部と下流接続部との間に、薄板流量要素が配置されている。この薄板流量要素によって、バイパスを通過する気体又は蒸気の流れが層流(laminar flow)になることが保証される。気体又は蒸気がセンサを通過する際には、所定の部分の気体が、バイパスと毛細管との両方を、バイパス比(bypass ratio)として知られている所定の比率で通過する。毛細管を通過する流率を感知しバイパス比を知ることにより、センサ全体を通過する流率は、毛細管を通過する測定された流率に比例する。
【0004】
上記のコイルは、ブリッジ型のアナログ電気回路に接続されているか、又は、デジタル・システムの入力に接続される。次に、これらのコイルは電流によって加熱し、気体の流れが存在しない場合には等しい抵抗値を提供し、ブリッジ型のアナログ電気回路の場合には平衡条件を生じる、例えば、出力信号がゼロとすることができる。あるいは、これら2つのコイルを電流によって加熱して、2つの抵抗値をデジタル回路を用いて測定することができる。
【0005】
次に、管の中に気体が流れている場合には、センサの有効測定範囲の範囲内で、上流側コイルの温度は気体の冷却効果によって低下し、下流側のコイルの温度は、上流側コイルから最初に移動し次に下流側コイルに気体又は蒸気によって移動した熱によって上昇する。この温度差は、実際、センサを流れる単位時間当たりの気体の分子の数に比例する。従って、温度に対するコイルの抵抗値の変化は既知であるから、ブリッジ回路又はデジタル回路の出力信号は、気体の質量流量の測定値を与えることになる。
【0006】
様々な状況において、様々な形態の熱移動現象は、これらの質量流量計測装置の測定値に実質的な誤差を生じさせ、質量流量コントローラにとっての問題点を生じさせている。1976年2月17日に設定登録された米国特許第3,938,384号(384特許)、1977年11月8日に設定登録された米国特許第4,056,975号、1993年3月9日に設定登録された米国特許第5,191,793号(793特許)及び1994年1月18日に設定登録された米国特許第5,279,154号(154特許)などが、この問題の例である。
【0007】
793特許において論じられているように、気体の圧力が比較的高い場合には、管の内部の気体の自由対流によって生じる誤差は、比較的深刻となる。その結果として、そのような圧力レベルが比較的高いときには、装置が重力の方向に対して傾斜しているならば、そのような対流に起因する誤差は大きい。これらの米国特許において論じられているように、比較的低圧の場合には、この種の対流の影響は大きくないのだが、管の外部にある周辺気体による自由対流によって生じる誤差が、重力に関する装置の姿勢の変動によっては主要な誤差の原因となる。384特許では、この種の対流の影響に、毛細管の周囲をコイルを用いて包囲し、コイルの近傍には開放型のセルフォーム(cell foam)材料を用いることによって、対処している。この米国特許において示されているようにこのようなアプローチの効果は有意義ではあるのだが、いくつかの短所も存在する。第1に、フォーム材料の存在の結果として、装置の応答が遅くなる。第2に、フォームの化学的組成やコイル及びコンジットとの接触度が変化すると、装置の較正が時間経過によって変化してしまう。第3に、装置のゲインを低下させる。
【0008】
上述したアプローチはその特別の形態であると考えることができるのであるが、コンジットの外部の対流に対する一般的なアプローチとしては、コイルに接触する材料として様々な材料を用いることによって、対流がコイル相互間で外部的に熱を伝達しないようにすることである。更に、センサを特定の向きに較正し、装置の方向の変化をゼロにすることが必要である。このような一般的なアプローチは、通常は、様々な理由によって不十分である。最も重要な理由は、流量の変化に対する装置の応答レベルが低下し、装置へのインターフェースのタイプによって人間又はシステムの相互作用が必要になるということである。
【0009】
更に一般的に、上述したような流量計測装置は、感知部分を外部の空気の流れから分離し、局所的な加熱又は冷却源の外部に置くために、ある種の容器の内部に配置される。しれは、もちろん、感知部分に直接的に隣接する対流の効果を排除するという関心によるものである。
【0010】
本発明は、気体が通過する管の外部における対流による熱移動に起因する気体の質量流量計測における姿勢感度に伴う従来の問題点を解決するものである。本発明は、高感度と流率変化に対する迅速な応答との目的を達成しながら、従来の問題を解決する。
【発明の概要】
【0011】
ある1つの側面では、通過して流れる流体の流量を表す流量測定信号を発生するのに用いられるために、流体が流量の共通軸に沿って流れる管に設置された少なくとも2つの温度センサ・コイルの姿勢感度を補償する方法が開示される。前記コイルの中の1つは、ある上流位置において前記管を流れる流体に熱エネルギを提供し、前記上流位置における前記流体の上流温度を確立し測定するように構成され、前記コイルの中の1つは、ある下流位置における前記流体の下流温度を測定するように構成される。前記流量測定信号は、前記測定された上流温度と前記測定された下流温度との差の関数である。この方法は、前記共通軸の方向の重力を測定するステップと、前記流量測定信号を前記測定された重力の関数として修正するステップとを含む。
【0012】
ある好適実施例では、この方法は、前記測定された重力の関数として補償信号を発生するステップと、前記流量測定信号を前記補償信号の関数として修正するステップと、を更に含む。ある好適実施例では、前記補償信号は、(a)前記1対の温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルに向かう方向に流れるように向けられているときには、流量測定信号に関して加算的であり、(b)前記1対の温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルから遠ざかる方向に流れるように向けられているときには、流量測定信号に関して減算的である。ある好適実施例では、前記コイルは前記コイルの温度の関数である抵抗値を有しており、この方法は、前記流量測定信号が前記コイルの抵抗値の間の差の関数となるように前記1つのコイルを接続するステップと、前記補償信号を、前記コイルの姿勢感度を補償するように前記流量測定信号に加算可能であるようなスケールで発生するステップと、を更に含む。
【0013】
更に、熱式質量流量測定システムが開示される。このシステムは、管を通過して流れる流体の流量を表す流量測定信号を発生するのに用いられるために、流体が流量の共通軸に沿って流れる管に設置された少なくとも2つの温度センサ・コイルであって、(a)前記コイルの中の1つは、ある上流位置において前記管を流れる流体に熱エネルギを提供し、前記上流位置における前記流体の上流温度を確立し測定するように構成され、前記コイルの中の1つは、ある下流位置における前記流体の下流温度を測定するように構成され、(b)前記流量測定信号は、前記測定された上流温度と前記測定された下流温度との差の関数である、少なくとも2つの温度センサ・コイルと、前記温度センサ・コイルに対して固定されており前記共通軸の方向の重力を測定するように構築され構成された重力センサと、前記温度センサ・コイルの姿勢感度を補償するように、前記流量測定信号を前記測定された重力の関数として修正する信号修正器と、を含む。
【0014】
ある好適実施例では、前記信号修正器は、前記測定された重力の関数として補償信号を発生する信号発生器を含み、前記流量測定信号は前記補償信号の関数として修正される。別の好適実施例では、前記信号発生器は前記補償信号を発生し、前記補償信号は、(a)前記温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルに向かう方向に流れるように向けられているときには、流量測定信号に関して加算的であり、(b)前記1対の温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルから遠ざかる方向に流れるように向けられているときには、流量測定信号に関して減算的である。別の好適実施例では、前記コイルは前記コイルの温度の関数である抵抗値を有しており、前記流量測定信号は前記コイルの抵抗値の間の差の関数であり、前記補償信号は、前記コイルの姿勢感度を補償するように前記流量測定信号に加算可能であるようなスケールで発生される。
【発明を実施するための最良の形態】
【0015】
以下の説明では、添付の図面が参照される。同じ参照番号を有する要素は、全体を通じてるイメージの要素を表す。
この出願において開示される方法及びシステムは、センサの軸(方位、orientation)に垂直なデュアル軸の加速度計など、低コストの重力センサを含む。重力センサは、傾斜センサとして構成される。補償信号が、センサの軸の傾斜角度の関数として提供される。補償信号は、方位に基づいて、流量測定信号を補償する。従って、ユーザは、設置に先立って方位を予め特定することを必要としない。
【0016】
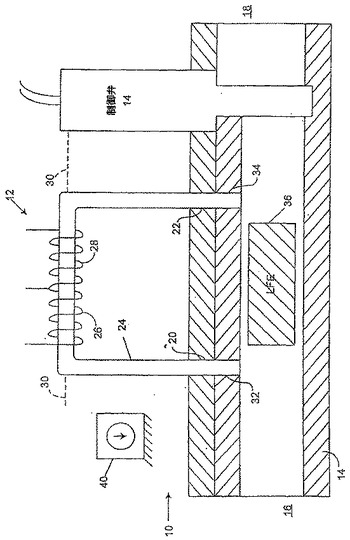
図1を参照すると、質量流量コントローラ10は、質量流量センサ12と制御弁14とを含む。流量センサ12は、典型的にはソース(図示せず)から気体又は蒸気を受け取るように結合された入口18と、典型的には真空チャンバやプラズマ発生器などの処理システム(図示せず)に結合された出口18とを有しバイパスと称される主管14を含む。毛細サイズの寸法であり小さな直径の管24の上流側及び下流側の端部20及び22は、気体又は蒸気を運ぶより大きな管と流体的に連絡している。毛細管は、相互に密接して毛細管の外側に巻かれたワイヤで構成されたコイル26及び28を有する。コイル26及び28は、これらのコイルの軸が軸30を中心として相互に同軸的となるように、毛細管24の上に配置されている。コイル26及び28は、温度感知性の抵抗値を有する材料、すなわち、温度の関数である抵抗値を有する材料から作られている。毛細管24の対向する両端部は、上流側及び下流側の接続部32及び34においてより大きな主管14と流体的に連絡している。
【0017】
層流(laminar flow)要素36が、バイパス14の、より大きな管への毛細管24の上流側接続部と下流側接続部34との間の部分の内部に配置されている。気体又は蒸気がセンサ12を通過して流れると、気体の所定の部分が、バイパス比として知られている所定の比率で、バイパスと毛細管との両方を通過して流れる。毛細管を通過して流れる流率を感知することによって、更にバイパス比を知ることにより、センサ全体を流れる流率は、毛細管を流れるものとして測定された流率と比例する。
【0018】
コイル26及び28は、好ましくはブリッジ型の電気回路(図1には図示されていない)又は2つの抵抗値を測定するデジタル回路に接続されている。これらのコイルは、電流によって加熱され、気体の流れが存在しないときには等しい抵抗値を提供し、ブリッジ型の電気回路の場合には、そのブリッジ型の回路に対する平衡条件を、つまり、ゼロである出力信号を、提供する。気体がセンサを通過する毛細管を通過すると、上流側コイル28は、下流側コイル26よりも平均温度が低くなる。この温度差は、管を通過して流れる単位時間当たりの分子の数に比例する。それぞれのコイルの抵抗値はコイルの温度の関数であるから、コイルの抵抗値の差を測定することによって、温度差を測定することができる。従って、コイルの抵抗値の温度による変動を知ることにより、ブリッジ回路又はデジタル回路の出力信号は、気体の質量流量の測度を提供する。
【0019】
2つのコイルのこの温度差は、毛細管を通過して流れる単位時間当たりの分子の数に比例する。従って、コイルの抵抗値の温度による変動を知ることにより、ブリッジ回路又はデジタル回路の出力信号は、気体の質量流量の測度を提供する。
【0020】
上述したように、様々な状況において、熱移動(伝達)現象の形態が、これらの質量流量計量及びコントローラ装置の測定値に実質的な誤差を生じさせる。コイル26及び28の軸30が水平方向であって重力に対して90度以外の方向を向いている場合には、コイルの間の外部の熱移動は、これらの質量流量計量装置の測定値に実質的な誤差を生じさせ、質量流量コントローラに、特に、流率が低い場合に、問題となりうる。従って、重力センサ40は、軸30に対して固定されるように配置されることによって、重力に対する軸30の角度の関数である出力を提供する。センサが重力に対して傾斜しているので、重力センサは、傾斜角度の関数である誤差信号を提供する。好ましくは、この誤差信号は、負の最小値と正の最大値との間の傾斜角度に比例する。従って、好適実施例では、センサ40は、軸30が重力に対して垂直であるときには、ゼロの出力を生じる。センサ40の出力は、好ましくは、軸30と重力とが平行であり上流側コイル26からの熱が対流によって下流側コイル28に向かって移動する(上流側コイル26が下流側コイル28よりも下方にある)ときには最小の(負の値である)出力まで比例的に下降し、従って、誤差は、上流側コイルに起因する対流によって下流側コイルまで移動される加法的な熱の結果であり、2つのコイルの間の抵抗値の測定された差異を増大させる。逆に、軸30と重力とが平行であって下流側コイル28からの熱が対流によって上流側コイル26に移動する(上流側コイル26が下流側コイル28よりも上方にある)ときには最大の(正の値の)出力まで比例的に上昇し、従って、誤差は、下流側コイルに起因する対流によって上流側コイルまで移動される熱の結果であり、2つのコイルの間の抵抗値の測定された差異を縮小させる。
【0021】
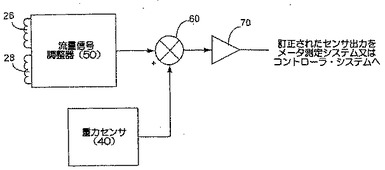
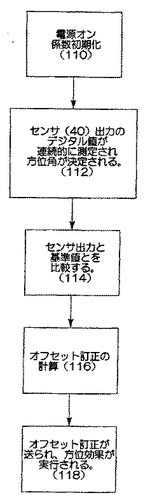
図2では、コイル26及び28の抵抗値が測定され、流量信号調整器50によって調整される。この調整器は、793特許において示されているようなブリッジ型の電気回路や、それぞれのコイルの抵抗値を測定するデジタル回路の残りの部分を含みうる。信号調整器50の出力は、コイル26及び28の抵抗値の差の関数である。この出力と重力センサ40によって提供される誤差信号とは、加算器60において加算され、加算された信号は前置増幅器70に与えられる。前置増幅器70からの出力は、例えば図3の80に示されているような計量測定システムに、又は、制御弁14を制御する図4の90に示されているような質量流量コントローラの入力に与えることができる。計量計測システムとコントローラ90とは、それぞれが、一般的に100と102とによってそれぞれ示されているデジタル・プロセッサとデータを記憶するメモリとを含むか、又は、それらに接続することができる。メモリ102は、コイルの感度の姿勢訂正に関するデータを含むデータの記憶を可能にする。例えば、センサ40の姿勢、姿勢オフセット、基準電圧値(センサ40が水平位置にあるときの)及び任意のブリッジ電圧オフセット訂正値(姿勢の関数としてのセンサ40の入りの関数としての)に関するセンサ電圧の係数である。A/Dコンバータ(図示せず)を提供して(センサ40の一部として、又は、別個に)、プロセッサ100によって処理される前に、センサ40の出力をデジタル化することも可能である。好適な方法の詳細は、図5との関係で説明される。最初に、ステップ110では、装置(図3のシステム80又はコントローラ90)の電源がオンされ、姿勢に関するセンサ電圧の係数が初期化される。また、好ましくは、姿勢オフセットが発生される。ステップ112に示されているように、センサ40の出力信号のデジタル化された値が常に測定され、方位角がプロセッサ100によって決定される。
【0022】
ステップ114では、システム80又はコントローラ90の初期化が完成すると、センサの電圧出力などのセンサ40の出力は、現在の角度を表す。これが、好ましくは、プロセッサ100によって、センサの水平位置を表す電圧である基準値と比較される。
【0023】
ステップ116では、オフセット訂正が、現在のセンサの姿勢位置と水平基準位置との関数として計算される。
ステップ118では、(ブリッジ)オフセット訂正がプロセッサによって送られ、方位効果が実行される。
【0024】
このように、ここで開示されている方法及びシステムは、デュアル軸加速度計などセンサ軸(方位)と垂直な低コストの重力センサを含む。この重力センサは、傾斜センサとして構成されている。補償信号が、センサ軸の傾斜角度の関数として提供される。補償信号は、方位に基づいて、流量測定信号を補償する。従って、ユーザは、設置の前に方位を予め設定することは必要ではなく、大きな効果が得られる。
【0025】
この明細書に記載されている例示的な実施例は、限定ではなく例示を目的とするものであり、当業者であれば、特許請求の範囲に記載されたより広い範囲内で、この出願の精神及び範囲から逸脱することなく、様々な修正、組合せ及び代替が可能である。
【図面の簡単な説明】
【0026】
【図1】本発明の原理に従って設計された質量流量コントローラの好適実施例の部分ブロック図の部分的な断面図である。
【図2】センサのコイルの姿勢感度を訂正する図1の実施例とともに用いられるように設計された電気訂正回路の好適実施例の部分的な回路図及びブロック図である。
【図3】図2のセンサ出力を用いた質量流量測定システムのブロック図である。
【図4】図2のセンサ出力を用いた質量流量コントローラのブロック図である。
【図5】図2、図3及び図4との関係で説明されるタイプの電気訂正回路の好適実施例を用いた質量流量コントローラ・システムの動作を示す流れ図である。
【技術分野】
【0001】
本発明は、質量流量(mass flow)の測定に関し、更に詳しくは、質量流量計及びコントローラの温度センサのための姿勢誤差自己訂正に関する。
【背景技術】
【0002】
様々な半導体プロセスには、製造工程中の製品に対して(通常は、気体又は蒸発した液体の形態で)提供される材料の量すなわち質量の慎重な制御が要求される。その結果、気体又は蒸気の質量流量を感知するために、流量センサとして知られている装置が開発されてきた。流量センサは、材料の流率を計測するように構成することができ、又は、制御装置と組み合わせて、製造工程中の製品に提供される材料の量を制御するように構成することができる。
【0003】
2つの一般的なタイプのセンサとして、圧力ベースのセンサと、温度ベースのセンサとがある。温度ベースのセンサは、熱伝達の原理(heat transfer principle)に基づいて動作する装置である。一般的な商用の形態では、毛細管サイズの寸法の小さな直径の管を備えていて、この管は、相互に近接する毛細管の外部に巻かれたワイヤで構成される2つのコイルを有する。これらのコイルは、温度感知性の抵抗値を有する、すなわち温度の関数である抵抗値を有する材料で作られている。毛細管の反対側の端部は、気体又は蒸気供給源とその気体又は蒸気が用いられる処理ステーションとの間で気体又は蒸気を移動させるより大きな管と流体的に連絡するようになっている。この大きい方の管のバイパスと称される部分の内部には、毛細管からより大きな管への上流接続部と下流接続部との間に、薄板流量要素が配置されている。この薄板流量要素によって、バイパスを通過する気体又は蒸気の流れが層流(laminar flow)になることが保証される。気体又は蒸気がセンサを通過する際には、所定の部分の気体が、バイパスと毛細管との両方を、バイパス比(bypass ratio)として知られている所定の比率で通過する。毛細管を通過する流率を感知しバイパス比を知ることにより、センサ全体を通過する流率は、毛細管を通過する測定された流率に比例する。
【0004】
上記のコイルは、ブリッジ型のアナログ電気回路に接続されているか、又は、デジタル・システムの入力に接続される。次に、これらのコイルは電流によって加熱し、気体の流れが存在しない場合には等しい抵抗値を提供し、ブリッジ型のアナログ電気回路の場合には平衡条件を生じる、例えば、出力信号がゼロとすることができる。あるいは、これら2つのコイルを電流によって加熱して、2つの抵抗値をデジタル回路を用いて測定することができる。
【0005】
次に、管の中に気体が流れている場合には、センサの有効測定範囲の範囲内で、上流側コイルの温度は気体の冷却効果によって低下し、下流側のコイルの温度は、上流側コイルから最初に移動し次に下流側コイルに気体又は蒸気によって移動した熱によって上昇する。この温度差は、実際、センサを流れる単位時間当たりの気体の分子の数に比例する。従って、温度に対するコイルの抵抗値の変化は既知であるから、ブリッジ回路又はデジタル回路の出力信号は、気体の質量流量の測定値を与えることになる。
【0006】
様々な状況において、様々な形態の熱移動現象は、これらの質量流量計測装置の測定値に実質的な誤差を生じさせ、質量流量コントローラにとっての問題点を生じさせている。1976年2月17日に設定登録された米国特許第3,938,384号(384特許)、1977年11月8日に設定登録された米国特許第4,056,975号、1993年3月9日に設定登録された米国特許第5,191,793号(793特許)及び1994年1月18日に設定登録された米国特許第5,279,154号(154特許)などが、この問題の例である。
【0007】
793特許において論じられているように、気体の圧力が比較的高い場合には、管の内部の気体の自由対流によって生じる誤差は、比較的深刻となる。その結果として、そのような圧力レベルが比較的高いときには、装置が重力の方向に対して傾斜しているならば、そのような対流に起因する誤差は大きい。これらの米国特許において論じられているように、比較的低圧の場合には、この種の対流の影響は大きくないのだが、管の外部にある周辺気体による自由対流によって生じる誤差が、重力に関する装置の姿勢の変動によっては主要な誤差の原因となる。384特許では、この種の対流の影響に、毛細管の周囲をコイルを用いて包囲し、コイルの近傍には開放型のセルフォーム(cell foam)材料を用いることによって、対処している。この米国特許において示されているようにこのようなアプローチの効果は有意義ではあるのだが、いくつかの短所も存在する。第1に、フォーム材料の存在の結果として、装置の応答が遅くなる。第2に、フォームの化学的組成やコイル及びコンジットとの接触度が変化すると、装置の較正が時間経過によって変化してしまう。第3に、装置のゲインを低下させる。
【0008】
上述したアプローチはその特別の形態であると考えることができるのであるが、コンジットの外部の対流に対する一般的なアプローチとしては、コイルに接触する材料として様々な材料を用いることによって、対流がコイル相互間で外部的に熱を伝達しないようにすることである。更に、センサを特定の向きに較正し、装置の方向の変化をゼロにすることが必要である。このような一般的なアプローチは、通常は、様々な理由によって不十分である。最も重要な理由は、流量の変化に対する装置の応答レベルが低下し、装置へのインターフェースのタイプによって人間又はシステムの相互作用が必要になるということである。
【0009】
更に一般的に、上述したような流量計測装置は、感知部分を外部の空気の流れから分離し、局所的な加熱又は冷却源の外部に置くために、ある種の容器の内部に配置される。しれは、もちろん、感知部分に直接的に隣接する対流の効果を排除するという関心によるものである。
【0010】
本発明は、気体が通過する管の外部における対流による熱移動に起因する気体の質量流量計測における姿勢感度に伴う従来の問題点を解決するものである。本発明は、高感度と流率変化に対する迅速な応答との目的を達成しながら、従来の問題を解決する。
【発明の概要】
【0011】
ある1つの側面では、通過して流れる流体の流量を表す流量測定信号を発生するのに用いられるために、流体が流量の共通軸に沿って流れる管に設置された少なくとも2つの温度センサ・コイルの姿勢感度を補償する方法が開示される。前記コイルの中の1つは、ある上流位置において前記管を流れる流体に熱エネルギを提供し、前記上流位置における前記流体の上流温度を確立し測定するように構成され、前記コイルの中の1つは、ある下流位置における前記流体の下流温度を測定するように構成される。前記流量測定信号は、前記測定された上流温度と前記測定された下流温度との差の関数である。この方法は、前記共通軸の方向の重力を測定するステップと、前記流量測定信号を前記測定された重力の関数として修正するステップとを含む。
【0012】
ある好適実施例では、この方法は、前記測定された重力の関数として補償信号を発生するステップと、前記流量測定信号を前記補償信号の関数として修正するステップと、を更に含む。ある好適実施例では、前記補償信号は、(a)前記1対の温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルに向かう方向に流れるように向けられているときには、流量測定信号に関して加算的であり、(b)前記1対の温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルから遠ざかる方向に流れるように向けられているときには、流量測定信号に関して減算的である。ある好適実施例では、前記コイルは前記コイルの温度の関数である抵抗値を有しており、この方法は、前記流量測定信号が前記コイルの抵抗値の間の差の関数となるように前記1つのコイルを接続するステップと、前記補償信号を、前記コイルの姿勢感度を補償するように前記流量測定信号に加算可能であるようなスケールで発生するステップと、を更に含む。
【0013】
更に、熱式質量流量測定システムが開示される。このシステムは、管を通過して流れる流体の流量を表す流量測定信号を発生するのに用いられるために、流体が流量の共通軸に沿って流れる管に設置された少なくとも2つの温度センサ・コイルであって、(a)前記コイルの中の1つは、ある上流位置において前記管を流れる流体に熱エネルギを提供し、前記上流位置における前記流体の上流温度を確立し測定するように構成され、前記コイルの中の1つは、ある下流位置における前記流体の下流温度を測定するように構成され、(b)前記流量測定信号は、前記測定された上流温度と前記測定された下流温度との差の関数である、少なくとも2つの温度センサ・コイルと、前記温度センサ・コイルに対して固定されており前記共通軸の方向の重力を測定するように構築され構成された重力センサと、前記温度センサ・コイルの姿勢感度を補償するように、前記流量測定信号を前記測定された重力の関数として修正する信号修正器と、を含む。
【0014】
ある好適実施例では、前記信号修正器は、前記測定された重力の関数として補償信号を発生する信号発生器を含み、前記流量測定信号は前記補償信号の関数として修正される。別の好適実施例では、前記信号発生器は前記補償信号を発生し、前記補償信号は、(a)前記温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルに向かう方向に流れるように向けられているときには、流量測定信号に関して加算的であり、(b)前記1対の温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルから遠ざかる方向に流れるように向けられているときには、流量測定信号に関して減算的である。別の好適実施例では、前記コイルは前記コイルの温度の関数である抵抗値を有しており、前記流量測定信号は前記コイルの抵抗値の間の差の関数であり、前記補償信号は、前記コイルの姿勢感度を補償するように前記流量測定信号に加算可能であるようなスケールで発生される。
【発明を実施するための最良の形態】
【0015】
以下の説明では、添付の図面が参照される。同じ参照番号を有する要素は、全体を通じてるイメージの要素を表す。
この出願において開示される方法及びシステムは、センサの軸(方位、orientation)に垂直なデュアル軸の加速度計など、低コストの重力センサを含む。重力センサは、傾斜センサとして構成される。補償信号が、センサの軸の傾斜角度の関数として提供される。補償信号は、方位に基づいて、流量測定信号を補償する。従って、ユーザは、設置に先立って方位を予め特定することを必要としない。
【0016】
図1を参照すると、質量流量コントローラ10は、質量流量センサ12と制御弁14とを含む。流量センサ12は、典型的にはソース(図示せず)から気体又は蒸気を受け取るように結合された入口18と、典型的には真空チャンバやプラズマ発生器などの処理システム(図示せず)に結合された出口18とを有しバイパスと称される主管14を含む。毛細サイズの寸法であり小さな直径の管24の上流側及び下流側の端部20及び22は、気体又は蒸気を運ぶより大きな管と流体的に連絡している。毛細管は、相互に密接して毛細管の外側に巻かれたワイヤで構成されたコイル26及び28を有する。コイル26及び28は、これらのコイルの軸が軸30を中心として相互に同軸的となるように、毛細管24の上に配置されている。コイル26及び28は、温度感知性の抵抗値を有する材料、すなわち、温度の関数である抵抗値を有する材料から作られている。毛細管24の対向する両端部は、上流側及び下流側の接続部32及び34においてより大きな主管14と流体的に連絡している。
【0017】
層流(laminar flow)要素36が、バイパス14の、より大きな管への毛細管24の上流側接続部と下流側接続部34との間の部分の内部に配置されている。気体又は蒸気がセンサ12を通過して流れると、気体の所定の部分が、バイパス比として知られている所定の比率で、バイパスと毛細管との両方を通過して流れる。毛細管を通過して流れる流率を感知することによって、更にバイパス比を知ることにより、センサ全体を流れる流率は、毛細管を流れるものとして測定された流率と比例する。
【0018】
コイル26及び28は、好ましくはブリッジ型の電気回路(図1には図示されていない)又は2つの抵抗値を測定するデジタル回路に接続されている。これらのコイルは、電流によって加熱され、気体の流れが存在しないときには等しい抵抗値を提供し、ブリッジ型の電気回路の場合には、そのブリッジ型の回路に対する平衡条件を、つまり、ゼロである出力信号を、提供する。気体がセンサを通過する毛細管を通過すると、上流側コイル28は、下流側コイル26よりも平均温度が低くなる。この温度差は、管を通過して流れる単位時間当たりの分子の数に比例する。それぞれのコイルの抵抗値はコイルの温度の関数であるから、コイルの抵抗値の差を測定することによって、温度差を測定することができる。従って、コイルの抵抗値の温度による変動を知ることにより、ブリッジ回路又はデジタル回路の出力信号は、気体の質量流量の測度を提供する。
【0019】
2つのコイルのこの温度差は、毛細管を通過して流れる単位時間当たりの分子の数に比例する。従って、コイルの抵抗値の温度による変動を知ることにより、ブリッジ回路又はデジタル回路の出力信号は、気体の質量流量の測度を提供する。
【0020】
上述したように、様々な状況において、熱移動(伝達)現象の形態が、これらの質量流量計量及びコントローラ装置の測定値に実質的な誤差を生じさせる。コイル26及び28の軸30が水平方向であって重力に対して90度以外の方向を向いている場合には、コイルの間の外部の熱移動は、これらの質量流量計量装置の測定値に実質的な誤差を生じさせ、質量流量コントローラに、特に、流率が低い場合に、問題となりうる。従って、重力センサ40は、軸30に対して固定されるように配置されることによって、重力に対する軸30の角度の関数である出力を提供する。センサが重力に対して傾斜しているので、重力センサは、傾斜角度の関数である誤差信号を提供する。好ましくは、この誤差信号は、負の最小値と正の最大値との間の傾斜角度に比例する。従って、好適実施例では、センサ40は、軸30が重力に対して垂直であるときには、ゼロの出力を生じる。センサ40の出力は、好ましくは、軸30と重力とが平行であり上流側コイル26からの熱が対流によって下流側コイル28に向かって移動する(上流側コイル26が下流側コイル28よりも下方にある)ときには最小の(負の値である)出力まで比例的に下降し、従って、誤差は、上流側コイルに起因する対流によって下流側コイルまで移動される加法的な熱の結果であり、2つのコイルの間の抵抗値の測定された差異を増大させる。逆に、軸30と重力とが平行であって下流側コイル28からの熱が対流によって上流側コイル26に移動する(上流側コイル26が下流側コイル28よりも上方にある)ときには最大の(正の値の)出力まで比例的に上昇し、従って、誤差は、下流側コイルに起因する対流によって上流側コイルまで移動される熱の結果であり、2つのコイルの間の抵抗値の測定された差異を縮小させる。
【0021】
図2では、コイル26及び28の抵抗値が測定され、流量信号調整器50によって調整される。この調整器は、793特許において示されているようなブリッジ型の電気回路や、それぞれのコイルの抵抗値を測定するデジタル回路の残りの部分を含みうる。信号調整器50の出力は、コイル26及び28の抵抗値の差の関数である。この出力と重力センサ40によって提供される誤差信号とは、加算器60において加算され、加算された信号は前置増幅器70に与えられる。前置増幅器70からの出力は、例えば図3の80に示されているような計量測定システムに、又は、制御弁14を制御する図4の90に示されているような質量流量コントローラの入力に与えることができる。計量計測システムとコントローラ90とは、それぞれが、一般的に100と102とによってそれぞれ示されているデジタル・プロセッサとデータを記憶するメモリとを含むか、又は、それらに接続することができる。メモリ102は、コイルの感度の姿勢訂正に関するデータを含むデータの記憶を可能にする。例えば、センサ40の姿勢、姿勢オフセット、基準電圧値(センサ40が水平位置にあるときの)及び任意のブリッジ電圧オフセット訂正値(姿勢の関数としてのセンサ40の入りの関数としての)に関するセンサ電圧の係数である。A/Dコンバータ(図示せず)を提供して(センサ40の一部として、又は、別個に)、プロセッサ100によって処理される前に、センサ40の出力をデジタル化することも可能である。好適な方法の詳細は、図5との関係で説明される。最初に、ステップ110では、装置(図3のシステム80又はコントローラ90)の電源がオンされ、姿勢に関するセンサ電圧の係数が初期化される。また、好ましくは、姿勢オフセットが発生される。ステップ112に示されているように、センサ40の出力信号のデジタル化された値が常に測定され、方位角がプロセッサ100によって決定される。
【0022】
ステップ114では、システム80又はコントローラ90の初期化が完成すると、センサの電圧出力などのセンサ40の出力は、現在の角度を表す。これが、好ましくは、プロセッサ100によって、センサの水平位置を表す電圧である基準値と比較される。
【0023】
ステップ116では、オフセット訂正が、現在のセンサの姿勢位置と水平基準位置との関数として計算される。
ステップ118では、(ブリッジ)オフセット訂正がプロセッサによって送られ、方位効果が実行される。
【0024】
このように、ここで開示されている方法及びシステムは、デュアル軸加速度計などセンサ軸(方位)と垂直な低コストの重力センサを含む。この重力センサは、傾斜センサとして構成されている。補償信号が、センサ軸の傾斜角度の関数として提供される。補償信号は、方位に基づいて、流量測定信号を補償する。従って、ユーザは、設置の前に方位を予め設定することは必要ではなく、大きな効果が得られる。
【0025】
この明細書に記載されている例示的な実施例は、限定ではなく例示を目的とするものであり、当業者であれば、特許請求の範囲に記載されたより広い範囲内で、この出願の精神及び範囲から逸脱することなく、様々な修正、組合せ及び代替が可能である。
【図面の簡単な説明】
【0026】
【図1】本発明の原理に従って設計された質量流量コントローラの好適実施例の部分ブロック図の部分的な断面図である。
【図2】センサのコイルの姿勢感度を訂正する図1の実施例とともに用いられるように設計された電気訂正回路の好適実施例の部分的な回路図及びブロック図である。
【図3】図2のセンサ出力を用いた質量流量測定システムのブロック図である。
【図4】図2のセンサ出力を用いた質量流量コントローラのブロック図である。
【図5】図2、図3及び図4との関係で説明されるタイプの電気訂正回路の好適実施例を用いた質量流量コントローラ・システムの動作を示す流れ図である。
【特許請求の範囲】
【請求項1】
通過して流れる流体の流量を表す流量測定信号を発生するのに用いられるために、流体が流量の共通軸に沿って流れる管に設置された少なくとも2つの温度センサ・コイルの姿勢感度を補償する方法であって、(a)前記コイルの中の1つは、ある上流位置において前記管を流れる流体に熱エネルギを提供し、前記上流位置における前記流体の上流温度を確立し測定するように構成され、前記コイルの中の1つは、ある下流位置における前記流体の下流温度を測定するように構成され、(b)前記流量測定信号は、前記測定された上流温度と前記測定された下流温度との差の関数である、方法において、
前記共通軸の方向の重力を測定するステップと、
前記流量測定信号を前記測定された重力の関数として修正するステップと、
を含むことを特徴とする方法。
【請求項2】
請求項1記載の方法において、
前記測定された重力の関数として補償信号を発生するステップと、
前記流量測定信号を前記補償信号の関数として修正するステップと、
を更に含むことを特徴とする方法。
【請求項3】
請求項2記載の方法において、
前記補償信号を発生するステップであって、前記補償信号は、(a)前記1対の温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルに向かう方向に流れるように向けられているときには、流量測定信号に関して加算的であり、(b)前記1対の温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルから遠ざかる方向に流れるように向けられているときには、流量測定信号に関して減算的である、ステップを更に含むことを特徴とする方法。
【請求項4】
請求項2記載の方法において、前記コイルは前記コイルの温度の関数である抵抗値を有しており、
前記流量測定信号が前記コイルの抵抗値の間の差の関数となるように前記1つのコイルを接続するステップと、
前記補償信号を、前記コイルの姿勢感度を補償するように前記流量測定信号に加算可能であるようなスケールで発生するステップと、
を更に含むことを特徴とする方法。
【請求項5】
熱式質量流量測定システムであって、
管を通過して流れる流体の流量を表す流量測定信号を発生するのに用いられるために、流体が流量の共通軸に沿って流れる管に設置された少なくとも2つの温度センサ・コイルであって、(a)前記コイルの中の1つは、ある上流位置において前記管を流れる流体に熱エネルギを提供し、前記上流位置における前記流体の上流温度を確立し測定するように構成され、前記コイルの中の1つは、ある下流位置における前記流体の下流温度を測定するように構成され、(b)前記流量測定信号は、前記測定された上流温度と前記測定された下流温度との差の関数である、少なくとも2つの温度センサ・コイルと、
前記温度センサ・コイルに対して固定されており前記共通軸の方向の重力を測定するように構築され構成された重力センサと、
前記温度センサ・コイルの姿勢感度を補償するように、前記流量測定信号を前記測定された重力の関数として修正する信号修正器と、
を含むことを特徴とする熱式質量流量測定システム。
【請求項6】
請求項5記載のシステムにおいて、前記信号修正器は、前記測定された重力の関数として補償信号を発生する信号発生器を含み、前記流量測定信号は前記補償信号の関数として修正されることを特徴とするシステム。
【請求項7】
請求項6記載のシステムにおいて、前記信号発生器は前記補償信号を発生し、前記補償信号は、(a)前記温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルに向かう方向に流れるように向けられているときには、流量測定信号に関して加算的であり、(b)前記1対の温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルから遠ざかる方向に流れるように向けられているときには、流量測定信号に関して減算的であることを特徴とするシステム。
【請求項8】
請求項6記載のシステムにおいて、前記コイルは前記コイルの温度の関数である抵抗値を有しており、前記流量測定信号は前記コイルの抵抗値の間の差の関数であり、前記補償信号は、前記コイルの姿勢感度を補償するように前記流量測定信号に加算可能であるようなスケールで発生されることを特徴とするシステム。
【請求項1】
通過して流れる流体の流量を表す流量測定信号を発生するのに用いられるために、流体が流量の共通軸に沿って流れる管に設置された少なくとも2つの温度センサ・コイルの姿勢感度を補償する方法であって、(a)前記コイルの中の1つは、ある上流位置において前記管を流れる流体に熱エネルギを提供し、前記上流位置における前記流体の上流温度を確立し測定するように構成され、前記コイルの中の1つは、ある下流位置における前記流体の下流温度を測定するように構成され、(b)前記流量測定信号は、前記測定された上流温度と前記測定された下流温度との差の関数である、方法において、
前記共通軸の方向の重力を測定するステップと、
前記流量測定信号を前記測定された重力の関数として修正するステップと、
を含むことを特徴とする方法。
【請求項2】
請求項1記載の方法において、
前記測定された重力の関数として補償信号を発生するステップと、
前記流量測定信号を前記補償信号の関数として修正するステップと、
を更に含むことを特徴とする方法。
【請求項3】
請求項2記載の方法において、
前記補償信号を発生するステップであって、前記補償信号は、(a)前記1対の温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルに向かう方向に流れるように向けられているときには、流量測定信号に関して加算的であり、(b)前記1対の温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルから遠ざかる方向に流れるように向けられているときには、流量測定信号に関して減算的である、ステップを更に含むことを特徴とする方法。
【請求項4】
請求項2記載の方法において、前記コイルは前記コイルの温度の関数である抵抗値を有しており、
前記流量測定信号が前記コイルの抵抗値の間の差の関数となるように前記1つのコイルを接続するステップと、
前記補償信号を、前記コイルの姿勢感度を補償するように前記流量測定信号に加算可能であるようなスケールで発生するステップと、
を更に含むことを特徴とする方法。
【請求項5】
熱式質量流量測定システムであって、
管を通過して流れる流体の流量を表す流量測定信号を発生するのに用いられるために、流体が流量の共通軸に沿って流れる管に設置された少なくとも2つの温度センサ・コイルであって、(a)前記コイルの中の1つは、ある上流位置において前記管を流れる流体に熱エネルギを提供し、前記上流位置における前記流体の上流温度を確立し測定するように構成され、前記コイルの中の1つは、ある下流位置における前記流体の下流温度を測定するように構成され、(b)前記流量測定信号は、前記測定された上流温度と前記測定された下流温度との差の関数である、少なくとも2つの温度センサ・コイルと、
前記温度センサ・コイルに対して固定されており前記共通軸の方向の重力を測定するように構築され構成された重力センサと、
前記温度センサ・コイルの姿勢感度を補償するように、前記流量測定信号を前記測定された重力の関数として修正する信号修正器と、
を含むことを特徴とする熱式質量流量測定システム。
【請求項6】
請求項5記載のシステムにおいて、前記信号修正器は、前記測定された重力の関数として補償信号を発生する信号発生器を含み、前記流量測定信号は前記補償信号の関数として修正されることを特徴とするシステム。
【請求項7】
請求項6記載のシステムにおいて、前記信号発生器は前記補償信号を発生し、前記補償信号は、(a)前記温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルに向かう方向に流れるように向けられているときには、流量測定信号に関して加算的であり、(b)前記1対の温度センサ・コイルの姿勢が、前記上流位置におけるコイルによって提供され重力に起因する熱エネルギ対流が前記下流位置におけるコイルから遠ざかる方向に流れるように向けられているときには、流量測定信号に関して減算的であることを特徴とするシステム。
【請求項8】
請求項6記載のシステムにおいて、前記コイルは前記コイルの温度の関数である抵抗値を有しており、前記流量測定信号は前記コイルの抵抗値の間の差の関数であり、前記補償信号は、前記コイルの姿勢感度を補償するように前記流量測定信号に加算可能であるようなスケールで発生されることを特徴とするシステム。
【図1】


【図2】
【図3】

【図4】

【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2008−513778(P2008−513778A)
【公表日】平成20年5月1日(2008.5.1)
【国際特許分類】
【出願番号】特願2007−532408(P2007−532408)
【出願日】平成17年9月15日(2005.9.15)
【国際出願番号】PCT/US2005/032626
【国際公開番号】WO2006/033901
【国際公開日】平成18年3月30日(2006.3.30)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
【公表日】平成20年5月1日(2008.5.1)
【国際特許分類】
【出願日】平成17年9月15日(2005.9.15)
【国際出願番号】PCT/US2005/032626
【国際公開番号】WO2006/033901
【国際公開日】平成18年3月30日(2006.3.30)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
[ Back to top ]