
連続マルチスケール再構成において詳細画像を補うX線コンピュータ断層撮像装置(X線CT装置)、医用画像処理装置及び医用画像処理方法

【課題】逐次近似再構成法だけでなく解析的再構成法も利用可能なマルチスケール再構成の手法を提供すること。
【解決手段】X線コンピュータ断層撮像装置を用いて取得された原データを用いて、第1の画像を再構成し、第1の画像から第1の再投影データを生成し、原データと第1の再投影データとから第1の差分データを生成し、第1の画像における関心領域の画像を用いて、関心領域に関する第1の補間画像を生成し、第1の差分データを用いた再構成により得られる第1の詳細画像と、第1の詳細画像と、を合成することで、第1の出力画像を生成するX線コンピュータ断層撮像装置。
【解決手段】X線コンピュータ断層撮像装置を用いて取得された原データを用いて、第1の画像を再構成し、第1の画像から第1の再投影データを生成し、原データと第1の再投影データとから第1の差分データを生成し、第1の画像における関心領域の画像を用いて、関心領域に関する第1の補間画像を生成し、第1の差分データを用いた再構成により得られる第1の詳細画像と、第1の詳細画像と、を合成することで、第1の出力画像を生成するX線コンピュータ断層撮像装置。
【発明の詳細な説明】
【技術分野】
【0001】
一般に画像処理およびシステムに関し、より詳細には、画像ボリュームグリッドサイズを連続的に減少させながらのマルチスケール再構成に関する。
【背景技術】
【0002】
再構成時には、関心領域(ROI)がズームされる。画像内のROIがズームされるので、画像の細部の品質は低くなる。特に、この問題は、逐次近似再構成(IR)法を用いて再構成されたズーム画像に関して明らかになる。一般に、IRの再投影ステップでは、X線ビームを減衰させる対象全体を把握していることが必要である。対照的に、解析的フィルタ補正逆投影(FBP)は、一般に、投影データがトランケーションされていないという条件で、全(full)撮像視野(FOV)の再構成を必要とすることなく、ズームされたROI内の画像を再構成する。
【0003】
IRにおける上述の問題を克服するため、次の手法が提案された。従来技術による1つの技法では、画像ボリューム内のROIの外部に対応する投影データの一部を除去したが、ROIの外部領域における特徴(feature)がないため、画質が劣化した。従来技術による別の技法では、粗いグリッドと細かいグリッドとを含む2つのボリュームグリッドを利用した。残念なことに、従来技術によるこの技法は計算量的に有効ではなく(computationally ineffective)、また、粗いグリッドにより、細かいグリッドの空間分解能が限定された。
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来技術による上記およびその他の技法を考慮すると、逐次近似再構成法だけでなく解析的再構成法も用いるマルチスケール再構成が今なお必要とされている。
【課題を解決するための手段】
【0005】
本実施形態に係るX線コンピュータ断層撮像装置は、被検体にX線ビームを曝射するX線曝射ユニットと、前記被検体を透過したX線ビームを複数の検出素子にて検出する検出ユニットと、前記検出ユニットの出力に基づく原データを用いて、第1の画像を再構成する再構成ユニットと、前記第1の画像から第1の再投影データを生成する再投影データ生成ユニットと、前記原データと前記第1の再投影データとから第1の差分データを生成する差分データ生成ユニットと、前記第1の画像における関心領域の画像を用いて、前記関心領域に関する第1の補間画像を生成する補間画像生成ユニットと、前記再構成ユニットにおいて前記第1の差分データを用いた再構成により得られる第1の詳細画像と、前記第1の詳細画像と、を合成することで、第1の出力画像を生成する画像生成ユニットと、を具備するものである。
【図面の簡単な説明】
【0006】
【図1】図1は、本実施形態によるマルチスケール再構成のためのマルチスライスX線CT装置またはスキャナの一実施形態を示す図。
【図2】図2は、本実施形態によるマルチスケール再構成処理に関与するステップを示すフロー図。
【図3】図3は、本実施形態による、ROIのセットと、これに対応する、サイズが異なり、かつ所望のズーム画像に対する最終的なグリッドサイズを含むネストされた3Dグリッドのセットとを示す図。
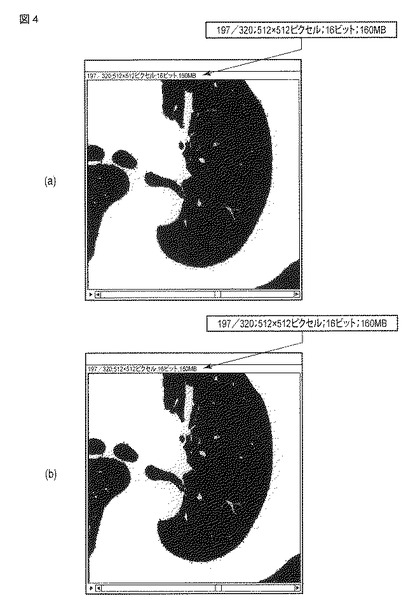
【図4】図4(a)、(b)は、本実施形態による一比較例におけるマルチスケール再構成の効果を示す図。
【図5】図5は、肺血管上で計測された線プロファイル(line profile)を示すグラフ。
【図6】図6は、本実施形態に係るマルチスケール再構成処理の概略を説明するための図である。
【発明を実施するための形態】
【0007】
ここで図面を参照すると、同じ参照符号はすべての図面を通して対応する構造を示すが、特に図1を参照すると、図は、ガントリ100と他のデバイスまたはユニットとを含む、本実施形態によるマルチスライスX線CT装置またはスキャナの一実施形態を示す。ガントリ100は、側面図にて示されており、X線管101と、環状フレーム102と、多列または2次元配列型のX線検出器103とをさらに含む。X線管101およびX線検出器103は、環状フレーム102上の被検体(subject)Sを横切る直径上に取り付けられ、環状フレーム102は、回転軸RAのまわりに回転可能に支持される。回転ユニット107は、フレーム102を0.4秒/回転などの高速で回転させ、その間、被検体Sは、軸RAに沿って、図示の紙面に対する奥行き方向または手前方向に移動される。
【0008】
マルチスライスX線CT装置は、X線管101がX線を生成するようにスリップリング108を介してX線管101に印加されるべき管電圧を生成する高電圧発生装置109をさらに含む。X線は被検体Sに向かって照射され、被検体Sの断面領域は円によって表されている。X線検出器103は、被検体Sを透過した照射X線を検出するために、被検体Sを挟んでX線管101の反対側にある。
【0009】
さらに図1を参照すると、X線CT装置またはスキャナは、X線検出器103からの検出された信号を処理するための他のデバイスをさらに含む。データ収集回路またはデータ収集システム(DAS)104は、各チャンネルに対してX線検出器103から出力された信号を電圧信号に変換し、それを増幅して、さらにデジタル信号に変換する。X線検出器103およびDAS104は、最大で900TPPR、900TPPRから1800TPPRの間、および900TPPRから3600TPPRの間にできる1回転あたりの所定の全投影数(TPPR:total number of projections per rotation)を、処理するように構成される。
【0010】
上述のデータは、非接触データ伝送装置105を通して、ガントリ100の外部のコンソールに収容された前処理デバイス106に送られる。前処理デバイス106は、生データに対して感度補正などの特定の補正を実行する。次に、その結果として生成されるデータ(投影データとも呼ばれるデータ)を、記憶デバイス112が再構成処理の直前の段階で記憶する。記憶デバイス112は、データ/制御バスを介して、再構成デバイス114、入力デバイス115、表示デバイス116、マルチスケール処理デバイス117、およびスキャンプラン支援装置200と共に、システムコントローラ110に接続される。スキャンプラン支援装置200は、撮像技師がスキャンプランを策定するのを支援するための機能を含む。
【0011】
再構成デバイス114の一実施形態は、種々のソフトウェア構成要素とハードウェア構成要素とをさらに含む。本実施形態によれば、CT装置の再構成デバイス114は、有利には、逐次近似再構成法を用いて全変動(TV)を最小化する。一般に、本実施形態の一実施形態の再構成デバイス114は、投影データに対してオーダードサブセット同時代数的再構成法(OS−SART)ステップなどの同時代数的再構成法とTV最小化ステップなどの調整(regularization)とを実行する全ボリューム逐次近似再構成(TVIR:total volume iterative reconstruction)アルゴリズムを実施する。一実施形態では、この2つのステップは、反復回数が事前に設定されているメインループにおいて連続して実施される。
【0012】
投影データは、TV最小化ステップの前に、オーダードサブセット同時代数的再構成法(OS−SART)に供される。投影データは、それぞれ特定数のビューを有する所定数のサブセットNにグループ化される。一実施形態では、オーダードサブセット同時代数的再構成法(OS−SART)の実施中に、各サブセットが連続して処理されてもよい。別の実施形態では、複数のサブセットが、複数の中央処理装置(CPU)または1つのグラフィック処理装置(GPU)などの特定のマイクロプロセッサを利用して並列に処理されてもよい。全変動(TV)最小化ステップにおいて、再構成デバイス114の一実施形態では、現在の画像ボリュームの目的関数が前の画像ボリュームの目的関数より小さくなるように正のステップ幅(step size)を探索するために直線探索方式(line search strategy)を用いる。
【0013】
再構成デバイス114はまた、オーダードサブセット同時代数的再構成法(OS−SART)の実施中に、2つの主要な演算を実行する。すなわち、再構成デバイス114は、各サブセットNに対して、計算上の投影データを生成するために画像ボリュームを再投影し、更新画像ボリュームを再構成するために、計測された投影データと計算上の投影データとの正規化された差分を逆投影する。さらに詳細には、再構成デバイス114の一実施形態では、システム行列の係数がキャッシュされないレイトレーシング法を用いることによって、画像ボリュームを再投影する。さらに、再構成デバイス114の一実施形態では、サブセット内のすべてのレイを同時に再投影する。この処理は任意選択で並列に実施される。逆投影において、再構成デバイス114の一実施形態では、所望の更新画像ボリュームを生成する目的でサブセット内のすべての正規化された差分投影データを逆投影するためにピクセルドリブン(pixel-driven)法を用いる。再構成デバイス114が、画像ボリュームを生成するためにサブセット内のすべてのレイサム(すなわち差分投影データ)を逆投影するので、この演算も任意選択で並列に実施される。これらの演算は、単一のOS−SARTステップを完了するために、すべてのサブセットNに適用される。さらに、AWADは任意選択で組み合わされる。
【0014】
再構成デバイス114の別の実施形態では、他の種々のソフトウェア構成要素とハードウェア構成要素が、投影データに対して所定の解析再構成処理を実行する。本実施形態によれば、CT装置の再構成デバイス114は、有利には、所定のフィルタ補正逆投影(FBP)法を用いて画像ボリュームを再構成する。上述およびその他の実施形態は、任意選択で、添付の特許請求の範囲により詳細に記載されている範囲に含まれる。
【0015】
本実施形態は、上述の構成要素に加えて、マルチスケール再構成関数を実行するための種々の他のソフトウェアモジュールとハードウェア構成要素とをさらに含む。本実施形態によれば、CT装置のマルチスケールデバイス117は、有利には、所定の細かい3Dグリッドを用いて原画像から所望の関心領域(ROI)を拡大するためのマルチスケール再構成関数を実行する。本実施形態の別の態様によれば、マルチスケールデバイス117の一実施形態では、減少するグリッドサイズまたは減少する撮像視野(FOV)サイズを用いて画像が反復的に再構成される所定数の連続マルチスケーリングステップにより、ROIの所望のズームが達成される。言い換えれば、この実施形態では、逐次近似マルチスケール再構成中にネストされた3Dグリッドの所定のセットを利用する。画像が連続的に拡大されるので、画像の細部は、最終的なズーム画像が所望の細部を維持するように、連続的に小さくなるグリッドサイズで決定される。
【0016】
本実施形態によれば、マルチスケールデバイス117は、1対の粗いグリッドと細かいグリッドのみを用いて出力画像を決定することによって、1つの例示的なマルチスケール再構成を達成する。一例では、粗いグリッドは原(original)撮像視野(FOV)であり、細かいグリッドは所望のズームまたは関心領域(ROI)である。画像は、細かいグリッドサイズを用いて補間画像と詳細画像とを合成することによって再構成され、合成された出力データは、所望の最終的な出力画像として出力される。特定の状況では、以下の反復処理が、所望の最終的な出力画像を再構成するために必要に応じて実行される。
【0017】
本実施形態の別の態様によれば、マルチスケールデバイス117は、出力データを所定数の減少するグリッドサイズと組み合わせて反復的に用いることによって1つの例示的なマルチスケール再構成を達成する。グリッドサイズの各スケールで、画像は、補間画像と詳細画像とを合成することによって再構成され、合成された出力データは、反復処理における補間画像および詳細画像の次のインスタンス(instance)を決定するための基準画像として用いられる。所望の最終的な出力画像は、グリッドサイズの所定のセットの最後のスケールが用いられる、上述の反復処理の終了時に得られる。厳密に言えば、反復は、原画像からの粗いグリッドと細かいグリッドとを用いる次の最初の再構成の後で開始される。
【0018】
本実施形態では、マルチスケールデバイス117は、他のソフトウェアモジュールおよび/または記憶デバイス112、再構成デバイス114、表示デバイス116、および入力デバイス115などのシステム構成要素にデータ/制御バスを介して動作可能に接続される。この点に関して、本実施形態では、マルチスケールデバイス117単独では、必ずしもマルチスケーリング関数および/またはそれに関連するタスクを実行しない。そのうえ、マルチスケールデバイス117は、本実施形態の代替実施形態では、任意選択で再構成デバイス114などの他のデバイスの一部である。
【0019】
次に図2を参照すると、フロー図は、本実施形態におけるマルチスケール再構成処理に関与するステップを示す。特定の状況では、再構成画像の一部分は、任意選択で、所定のサイズにズームされる。この所望の部分は、一般に、関心領域(ROI)である。画像の上述のズーミングを達成するため、最初にステップS100において、スケールがROIのサイズおよび所望のズーム画像のサイズに基づいて選択される。1つの例示的なスケールは、粗いグリッドサイズまたは粗いグリッドボリュームに関連する細かいグリッドサイズまたは細かいグリッドボリュームに基づいて決定される。スケールを決定するにあたって、特定の種類のデータに関してステップS100で考慮する必要がある他の要因がある。
【0020】
本実施形態におけるマルチスケール再構成処理のステップを説明するにあたって、演算は式の形でも表される。これらの式では、上述のスケールは、粗いグリッドおよび細かいグリッドの2つの3Dグリッドxi,kの下付き添え字として用いられるパラメータk=0および1によって表される。パラメータkはグリッドのピッチサイズを決定し、インデックスiは、グリッド上のすべての点にインデックスを付ける。グリッドxi,0は、全撮像視野に対応する第1のピッチサイズを有する粗いグリッドであり、より細かいグリッドxi,1は、所望のズームされた撮像視野に対応する第2のピッチサイズを有する細かいグリッドである。グリッドでは、第2のピッチサイズは第1のピッチサイズより小さいが、2つのグリッドは、同じ数のピクセルを有する。k=0および1における2つのグリッドでは、例示的なマルチスケール再構成処理では、最初に、原計測データ(original measure data)
【数1】

【0021】
から、式(1)で表される所定の再構成法RECON1に従って、粗いグリッドxi,0上で全画像ボリュームf0を再構成する。
【数2】
【0022】
ここで、粗いグリッドサイズまたは粗いグリッドボリュームxi,0は、全撮像視野または原撮像視野に対応する。1つの例示的処理によれば、投影データに対してオーダードサブセット同時代数的再構成法(OS−SART)ステップなどの同時代数的再構成法とTV最小化ステップなどの調整とを実行する全ボリューム逐次近似再構成(TVIR)アルゴリズムなどの再構成法RECON1は反復的である。別の例示的処理によれば、再構成法RECON1は、任意選択で、フィルタ補正逆投影(FBP)法などの所定の解析的再構成処理である。
【0023】
k=0および1における2つのグリッドの一例をさらに用いると、画像ボリュームは、ステップS110において、補間された画像ボリューム
【数3】
【0024】
を得るために、以前に決定された全画像ボリュームf0(xi,0)から細かいグリッドボリュームxi,1上で補間される。以下の式(2.1)では、スケールk=1において、細かいグリッドボリュームxi,1が得られる。
【数4】
【0025】
ここで、INTPLは、3重線形補間(trilinear interpolation)などの所定の補間法である。
【0026】
ステップS120において、式(2.2)に示す投影の新規セット
【数5】
【0027】
を得るために、以前に再構成された全画像ボリュームf0が順投影される。
【数6】
【0028】
FPJは、所定の順投影法である。再投影された全投影データ
【数7】
【0029】
は、いくつかの追加情報を含み、原計測データ
【数8】
【0030】
とは異なる。
【0031】
ステップS130では、以前に再投影された全投影データ
【数9】
【0032】
を、原計測データ
【数10】
【0033】
から減算することで、式(2.3)に示す差分が得られる。
【数11】
【0034】
ある意味では、ステップS130において、ズーム画像のある程度の細部を含むいくつかのデータが分離される。
【数12】
【0035】
ここで、差分
【数13】
【0036】
は、全画像ボリュームのノイズと詳細画像情報の両方を表す。一般に、ノイズは、物理的なピクセルサイズの差によって、および/またはシステムの光学部品によるぼけ(blur)によって生じる。そのうえ、より大きな差分が端部領域で見られる。
【0037】
k=0および1における2つの所定のグリッドの一例をさらに用いると、ステップS140における例示的なマルチスケール再構成処理では、次に、式(2.3)の以前に決定された差分
【数14】
【0038】
から、式(2.4)に表される所定の再構成法RECON2に従って、所望のズームされた撮像視野に対応するより細かいグリッドxi,1上で詳細ボリュームg1を再構成する。
【数15】
【0039】
ここで、所定の再構成法RECON2は、所定の再構成法RECON1とは独立している。1つの例示的処理によれば、投影データに対してオーダードサブセット同時代数的再構成法(OS−SART)ステップなどの同時代数的再構成法とTV最小化ステップなどの調整とを実行する全ボリューム逐次近似再構成(TVIR)アルゴリズムなどの再構成法RECON2は反復的である。別の例示的処理によれば、再構成法RECON2は、任意選択で、フィルタ補正逆投影(FBP)法などの所定の解析的再構成処理である。
【0040】
2つの所定の粗いグリッドおよび細かいグリッドの例において、ステップS150における例示的なマルチスケール再構成処理では、次に、式(2.5)に規定するk=1のスケールで所望のズームされた出力画像f1を得るために、式(2.4)に規定するより細かいグリッドxi,1上の上述の詳細ボリュームg1と、式(2.1)に規定する細かいグリッドボリュームxi,1上の補間された画像ボリューム
【数16】
【0041】
とを合成する。
【数17】
【0042】
言うまでもなく、式(1)から(2.5)に関連する上述のステップは、任意選択で、所定の逐次的な形で、少なくとも部分的に並列に、またはこの両方を組み合わせて実行される。いずれの場合にも、本実施形態による例示的処理は、必ずしも特定の順序のステップ、特定の式、または特定の技法に限定されない。
【0043】
そのうえ、上述の例示のマルチスケール再構成法は、任意選択で、ズーム画像の画質を向上させるために追加のステップを含むように拡張される。本実施形態によるマルチスケール再構成の別の実施形態では、最終の出力画像が生成される前に、詳細画像が、任意選択で、異なるスケールのそれぞれにおいて反復される。
【0044】
1対の粗いグリッドと細かいグリッドとを用いる代わりに、任意選択のステップでは、サイズが異なり、かつ所望のズーム画像のための最終的なグリッドサイズを含むいくつかのネストされた3Dグリッドからなるセットを用いる。たとえば、80ミリメートル(mm)の撮像視野(FOV)を再構成しなければならない場合、本実施形態によれば、一実施形態におけるマルチスケール再構成処理では、320mmの関心領域(ROI)に続いて160mmのROIを再構成してから、最終的に80mmのROIを再構成する。これらのROIの中心はすべて同じ位置にある。したがって、スケールは、いくつかのネストされた3Dグリッドからなるセットxi,kの下付き添え字として用いられるパラメータkによって表される。パラメータkはグリッドのピッチサイズを決定し、インデックスiは、グリッド上のすべての点にインデックスを付ける。グリッドxi,0は、全撮像視野に対応する最も粗いグリッドである。kが増加するにつれて、グリッドは細かくなる。
【0045】
本実施形態におけるマルチスケール再構成処理の任意選択のステップでは、出力画像は、マルチスケール再構成ステップにおいて最終的なズーム画像を得るために反復的に処理される。所定の逐次的な形での320mmのROIの再構成から80mmのFOVを得る上記の例を用いると、ネストされた3Dグリッドxi,kに関して、スケールkは0から2の範囲である。
【0046】
図2に示すフロー図を参照すると、ステップS160では、異なるスケールを用いて追加のステップを実行するべきかどうかを決定する。追加のスケールでステップを実行するべきでないと決定された場合、本実施形態におけるマルチスケール再構成処理では、ステップS180において、式(2.5)で規定されるk=1のスケールで所望のズームされた出力画像f1を出力する。一方、ステップS160において、追加のスケールでさらなるステップを実行するべきであると決定されると、本実施形態によるマルチスケール再構成処理は、パラメータkの値を1だけ増分することによって次に小さいピッチサイズを有するグリッドが選択されるステップS170に進み、さらにステップS110に進む。同時にステップS170において、拡大するために、所定の複数のROIのうちのより小さなROIも選択される。これが、本実施形態によるマルチスケール再構成処理の次のインスタンスを生成するための反復処理の始まりである。
【0047】
スケールk=2では、最初の反復インスタンスにおいて、k=1で得られたgk(xi,k)およびfk(xi,k)の上述の値が用いられる。その後、所定数の反復処理が完了するまで、反復中に、前のインスタンスの値が次のインスタンスで用いられる。k=2におけるステップS110の次のインスタンスでは、画像ボリュームは、ステップS110において、補間された画像ボリューム
【数18】
【0048】
を得るために、以前に決定された全画像ボリュームfk(xi,k)から次に細かいグリッドボリュームxi,k+1上で補間される。以下の式(3.1)では、スケールk=2において、細かいグリッドボリュームxi,k+1が得られる。
【数19】
【0049】
ここで、INTPLは、3重線形補間などの所定の補間法である。
【0050】
ステップS120の次のインスタンスでは、以前に再構成された詳細画像ボリュームgkが、式(3.2)に示す詳細画像ボリュームのための投影の新規セット
【数20】
【0051】
を得るために順投影される。
【数21】
【0052】
FPJは、所定の順投影法である。再投影された投影データ
【数22】
【0053】
は、いくつかの追加情報を含み、以前に決定された差分
【数23】
【0054】
とは異なる。
【0055】
ステップS130の次のインスタンスでは、以前に再投影された全投影データ
【数24】
【0056】
が、以前に決定された差分
【数25】
【0057】
から減算され、式(3.3)に示す差分
【数26】
【0058】
を得る。ある意味では、ステップS130において、ズーム画像のある程度の細部を含むいくつかのデータが分離される。
【数27】
【0059】
ここで、差分
【数28】
【0060】
は、詳細画像ボリュームのノイズと詳細画像情報の両方を表す。一般に、ノイズは、物理的なピクセルサイズの差によって、および/またはシステムの光学部品によるぼけによって生じる。そのうえ、より大きな差分が端部領域で見られる。
【0061】
k=k+1における2つの所定のグリッドの一例をさらに用いると、ステップS140の次のインスタンスにおける例示的なマルチスケール再構成処理では、次に、式(3.4)に表される所定の再構成法RECON2に従って式(3.3)の以前に決定された差分
【数29】
【0062】
から所望のズームされた撮像視野に対応するより細かいグリッドxi,k+1上で詳細ボリュームgk+1を再構成する。
【数30】
【0063】
ここで、所定の再構成法RECON2は、所定の再構成法RECON1とは独立している。1つの例示的処理によれば、投影データに対してオーダードサブセット同時代数的再構成法(OS−SART)ステップなどの同時的代数的再構成法とTV最小化ステップなどの調整とを実行する全ボリューム逐次近似再構成(TVIR)アルゴリズムなどの再構成法RECON2は反復的である。別の例示的処理によれば、再構成法RECON2は、任意選択で、フィルタ補正逆投影(FBP)法などの所定の解析的再構成処理である。
【0064】
任意選択の複数の細かいグリッドの例において、ステップS150の次のインスタンスにおける例示的なマルチスケール再構成処理では、次に、式(3.5)に規定するk=k+1のスケールで所望のズームされた出力画像fk+1を得るために、式(3.4)に規定するより細かいグリッドxi,k+1上の上述の詳細ボリュームgk+1と、式(3.1)に規定する細かいグリッドボリュームxi,k+1上の補間された画像ボリューム
【数31】
【0065】
とを合成する。
【数32】
【0066】
言うまでもなく、上述のステップは、任意選択で、所定の逐次的な形で、少なくとも部分的に並列に、またはこの両方を組み合わせて実行される。いずれの場合にも、本実施形態による例示的処理は、本実施形態を実施するために、反復中でも、特定の順序のステップ、特定の式、または特定の技法に限定されない。
【0067】
ステップS160の次のインスタンスでは、異なるスケールを用いて追加のステップを実行するべきかどうかを再度決定する。追加のスケールでステップを実行するべきでないと決定された場合、本実施形態におけるマルチスケール再構成処理では、ステップS180において、式(3.5)に規定するk=k+1のスケールで所望のズームされた出力画像fk+1を出力する。一方、ステップS160において、追加のスケールでさらなるステップを実行するべきであると決定されると、本実施形態によるマルチスケール再構成処理は、パラメータkの値を1だけ増分することによって次のサイズのグリッドが選択されるステップS170に進み、さらにステップS110に進む。これが、本実施形態によるマルチスケール再構成処理の追加のインスタンスを生成するための反復処理の次のインスタンスの始まりである。
【0068】
次に図3を参照すると、図は、ネストされたROIの所定のセットと、これに対応する、サイズが異なり、かつ所望のズーム画像に対する最終的なグリッドサイズを含む3Dグリッドとを示す。図3(a)は、撮像視野(FOV)であるROI0と、より小さな関心領域ROI1と、最終的な所望のまたは最小の関心領域ROI2とを含む、3つのROIからなる所定のセットを示す。図3(b)は、原グリッドであるG0と、より小さなグリッドG1と、最小のグリッドG2とを含む、3つのネストされたグリッドからなる所定のセットを示す。これらのグリッドG0、G1、およびG2のそれぞれのサイズは同じ数のピクセルを有し、グリッドサイズは、マルチスケール再構成処理を通じて一定に保たれる。たとえば、グリッドサイズは512x512である。したがって、マルチスケール再構成処理を通じてグリッドのインデックスがG0からG1に、G1からG2に増加するにつれて、グリッドの間隔またはピッチが小さくなる。一般に、グリッドの間隔またはピッチは、「ROIサイズ/グリッドサイズ」に規定される。
【0069】
たとえば、40ミリメートル(mm)の撮像視野(FOV)の最終的なROI2を再構成しなければならない場合、一実施形態におけるマルチスケール再構成処理では、原グリッドG0を用いて再構成して160mmの関心領域(ROI)を生成する。次に、マルチスケール再構成処理では、第2のグリッドG1を用いて80mmのROI1を生成してから、第3のグリッドG3を用いて40mmのROIを再構成する。これらのROIおよびグリッドの中心はすべて同じ位置にある。したがって、スケールは、いくつかのネストされた3Dグリッドからなるセットの下付き添え字として用いられるパラメータkによって表される。パラメータkはグリッドのピッチサイズを決定し、インデックスiは、グリッド上のすべての点にインデックスを付ける。上記の例では、グリッドのセットを生成する際、グリッドのサイズは2分の1に減少する。本実施形態は、いかなる特定の減少方式にも限定されない。
【0070】
次に図4(a)および図4(b)を参照すると、本実施形態による一比較例におけるマルチスケール再構成の効果が示されている。図4(a)は、従来技術による技法を用いてズームされた肺の画像を示す。図4(b)は、本実施形態によるマルチスケール反復再構成法を用いてズームされた同じ肺の画像を示す。マルチスケール反復再構成法では、20回の反復にわたるOS−SARTと、500mmから320mmまでの2つのステップからなるマルチスケール再構成とを利用した。
【0071】
次に図5を参照すると、グラフは、肺血管を横切って計測された線プロファイルを示す。x軸は画像のピクセル座標であり、y軸は対応するHU値である。そのうえ、IOLDは、2つのグリッドの手法(IR_00)または従来技術の古いIRを表す。一方、INEWは、2つのステップの手法(IR_01)または本実施形態によるマルチスケール逐次近似再構成法の新規IRを表す。線プロファイルは肺血管を横切って計測され、グラフは、本実施形態によるマルチスケール逐次近似再構成法によって血管の視認性が向上することを示す。
【0072】
すなわち、本実施形態に係るX線コンピュータ断層撮像装置によれば、例えば図6に示す様に、逐次近似再構成処理を行う場合には、撮像によって取得された原データ10を再構成することで、再構成画像11が生成されると共に、再構成画像11をFPJ処理することで再投影データ12が生成される。原データ10と再投影データ12を用いた差分13により、差分データ15が生成され、当該差分データ15を再構成することで、シャープな成分とボケの成分を含む詳細画像16が生成される。一方、再構成画像11上の関心領域を拡大・補完することで、ボケを含む補間画像14が生成される。シャープな成分とボケの成分を含む詳細画像16とボケを含む補間画像14とを用いた加算処理17を実行することで、ボケ成分が相殺されシャープな成分を含む高精細な出力画像18を生成することができる。
【0073】
以上述べた処理を、関心領域のサイズを変更しながら逐次繰り返し実行することで、マルチスケール再構成を実行し、高精細な出力画像を生成することが可能となる。
【0074】
なお、以上述べた本実施形態では、X線コンピュータ断層撮像装置を例として説明した。しかしながら、当該例に拘泥されず、例えばX線コンピュータ断層撮像装置によって取得された原データを用いて、医用画像処理装置(医用ワークステーション)を用いて、本実施形態に係る手法を実現するようにしてもよい。
【0075】
本発明の多数の特徴および利点が本発明の構造および機能の詳細と共に前述の説明に記載されているが、本開示は例示に過ぎないこと、さらに、詳細、特に部品の形状、大きさ、および構成、ならびにソフトウェア、ハードウェア、またはその両方の組み合わせにおける実装形態に関して、変更を加えることができるが、この変更は、添付の特許請求の範囲が表現される用語の広い一般的な意味によって最大限示される本発明の原理内に含まれることを理解されたい。
【技術分野】
【0001】
一般に画像処理およびシステムに関し、より詳細には、画像ボリュームグリッドサイズを連続的に減少させながらのマルチスケール再構成に関する。
【背景技術】
【0002】
再構成時には、関心領域(ROI)がズームされる。画像内のROIがズームされるので、画像の細部の品質は低くなる。特に、この問題は、逐次近似再構成(IR)法を用いて再構成されたズーム画像に関して明らかになる。一般に、IRの再投影ステップでは、X線ビームを減衰させる対象全体を把握していることが必要である。対照的に、解析的フィルタ補正逆投影(FBP)は、一般に、投影データがトランケーションされていないという条件で、全(full)撮像視野(FOV)の再構成を必要とすることなく、ズームされたROI内の画像を再構成する。
【0003】
IRにおける上述の問題を克服するため、次の手法が提案された。従来技術による1つの技法では、画像ボリューム内のROIの外部に対応する投影データの一部を除去したが、ROIの外部領域における特徴(feature)がないため、画質が劣化した。従来技術による別の技法では、粗いグリッドと細かいグリッドとを含む2つのボリュームグリッドを利用した。残念なことに、従来技術によるこの技法は計算量的に有効ではなく(computationally ineffective)、また、粗いグリッドにより、細かいグリッドの空間分解能が限定された。
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来技術による上記およびその他の技法を考慮すると、逐次近似再構成法だけでなく解析的再構成法も用いるマルチスケール再構成が今なお必要とされている。
【課題を解決するための手段】
【0005】
本実施形態に係るX線コンピュータ断層撮像装置は、被検体にX線ビームを曝射するX線曝射ユニットと、前記被検体を透過したX線ビームを複数の検出素子にて検出する検出ユニットと、前記検出ユニットの出力に基づく原データを用いて、第1の画像を再構成する再構成ユニットと、前記第1の画像から第1の再投影データを生成する再投影データ生成ユニットと、前記原データと前記第1の再投影データとから第1の差分データを生成する差分データ生成ユニットと、前記第1の画像における関心領域の画像を用いて、前記関心領域に関する第1の補間画像を生成する補間画像生成ユニットと、前記再構成ユニットにおいて前記第1の差分データを用いた再構成により得られる第1の詳細画像と、前記第1の詳細画像と、を合成することで、第1の出力画像を生成する画像生成ユニットと、を具備するものである。
【図面の簡単な説明】
【0006】
【図1】図1は、本実施形態によるマルチスケール再構成のためのマルチスライスX線CT装置またはスキャナの一実施形態を示す図。
【図2】図2は、本実施形態によるマルチスケール再構成処理に関与するステップを示すフロー図。
【図3】図3は、本実施形態による、ROIのセットと、これに対応する、サイズが異なり、かつ所望のズーム画像に対する最終的なグリッドサイズを含むネストされた3Dグリッドのセットとを示す図。
【図4】図4(a)、(b)は、本実施形態による一比較例におけるマルチスケール再構成の効果を示す図。
【図5】図5は、肺血管上で計測された線プロファイル(line profile)を示すグラフ。
【図6】図6は、本実施形態に係るマルチスケール再構成処理の概略を説明するための図である。
【発明を実施するための形態】
【0007】
ここで図面を参照すると、同じ参照符号はすべての図面を通して対応する構造を示すが、特に図1を参照すると、図は、ガントリ100と他のデバイスまたはユニットとを含む、本実施形態によるマルチスライスX線CT装置またはスキャナの一実施形態を示す。ガントリ100は、側面図にて示されており、X線管101と、環状フレーム102と、多列または2次元配列型のX線検出器103とをさらに含む。X線管101およびX線検出器103は、環状フレーム102上の被検体(subject)Sを横切る直径上に取り付けられ、環状フレーム102は、回転軸RAのまわりに回転可能に支持される。回転ユニット107は、フレーム102を0.4秒/回転などの高速で回転させ、その間、被検体Sは、軸RAに沿って、図示の紙面に対する奥行き方向または手前方向に移動される。
【0008】
マルチスライスX線CT装置は、X線管101がX線を生成するようにスリップリング108を介してX線管101に印加されるべき管電圧を生成する高電圧発生装置109をさらに含む。X線は被検体Sに向かって照射され、被検体Sの断面領域は円によって表されている。X線検出器103は、被検体Sを透過した照射X線を検出するために、被検体Sを挟んでX線管101の反対側にある。
【0009】
さらに図1を参照すると、X線CT装置またはスキャナは、X線検出器103からの検出された信号を処理するための他のデバイスをさらに含む。データ収集回路またはデータ収集システム(DAS)104は、各チャンネルに対してX線検出器103から出力された信号を電圧信号に変換し、それを増幅して、さらにデジタル信号に変換する。X線検出器103およびDAS104は、最大で900TPPR、900TPPRから1800TPPRの間、および900TPPRから3600TPPRの間にできる1回転あたりの所定の全投影数(TPPR:total number of projections per rotation)を、処理するように構成される。
【0010】
上述のデータは、非接触データ伝送装置105を通して、ガントリ100の外部のコンソールに収容された前処理デバイス106に送られる。前処理デバイス106は、生データに対して感度補正などの特定の補正を実行する。次に、その結果として生成されるデータ(投影データとも呼ばれるデータ)を、記憶デバイス112が再構成処理の直前の段階で記憶する。記憶デバイス112は、データ/制御バスを介して、再構成デバイス114、入力デバイス115、表示デバイス116、マルチスケール処理デバイス117、およびスキャンプラン支援装置200と共に、システムコントローラ110に接続される。スキャンプラン支援装置200は、撮像技師がスキャンプランを策定するのを支援するための機能を含む。
【0011】
再構成デバイス114の一実施形態は、種々のソフトウェア構成要素とハードウェア構成要素とをさらに含む。本実施形態によれば、CT装置の再構成デバイス114は、有利には、逐次近似再構成法を用いて全変動(TV)を最小化する。一般に、本実施形態の一実施形態の再構成デバイス114は、投影データに対してオーダードサブセット同時代数的再構成法(OS−SART)ステップなどの同時代数的再構成法とTV最小化ステップなどの調整(regularization)とを実行する全ボリューム逐次近似再構成(TVIR:total volume iterative reconstruction)アルゴリズムを実施する。一実施形態では、この2つのステップは、反復回数が事前に設定されているメインループにおいて連続して実施される。
【0012】
投影データは、TV最小化ステップの前に、オーダードサブセット同時代数的再構成法(OS−SART)に供される。投影データは、それぞれ特定数のビューを有する所定数のサブセットNにグループ化される。一実施形態では、オーダードサブセット同時代数的再構成法(OS−SART)の実施中に、各サブセットが連続して処理されてもよい。別の実施形態では、複数のサブセットが、複数の中央処理装置(CPU)または1つのグラフィック処理装置(GPU)などの特定のマイクロプロセッサを利用して並列に処理されてもよい。全変動(TV)最小化ステップにおいて、再構成デバイス114の一実施形態では、現在の画像ボリュームの目的関数が前の画像ボリュームの目的関数より小さくなるように正のステップ幅(step size)を探索するために直線探索方式(line search strategy)を用いる。
【0013】
再構成デバイス114はまた、オーダードサブセット同時代数的再構成法(OS−SART)の実施中に、2つの主要な演算を実行する。すなわち、再構成デバイス114は、各サブセットNに対して、計算上の投影データを生成するために画像ボリュームを再投影し、更新画像ボリュームを再構成するために、計測された投影データと計算上の投影データとの正規化された差分を逆投影する。さらに詳細には、再構成デバイス114の一実施形態では、システム行列の係数がキャッシュされないレイトレーシング法を用いることによって、画像ボリュームを再投影する。さらに、再構成デバイス114の一実施形態では、サブセット内のすべてのレイを同時に再投影する。この処理は任意選択で並列に実施される。逆投影において、再構成デバイス114の一実施形態では、所望の更新画像ボリュームを生成する目的でサブセット内のすべての正規化された差分投影データを逆投影するためにピクセルドリブン(pixel-driven)法を用いる。再構成デバイス114が、画像ボリュームを生成するためにサブセット内のすべてのレイサム(すなわち差分投影データ)を逆投影するので、この演算も任意選択で並列に実施される。これらの演算は、単一のOS−SARTステップを完了するために、すべてのサブセットNに適用される。さらに、AWADは任意選択で組み合わされる。
【0014】
再構成デバイス114の別の実施形態では、他の種々のソフトウェア構成要素とハードウェア構成要素が、投影データに対して所定の解析再構成処理を実行する。本実施形態によれば、CT装置の再構成デバイス114は、有利には、所定のフィルタ補正逆投影(FBP)法を用いて画像ボリュームを再構成する。上述およびその他の実施形態は、任意選択で、添付の特許請求の範囲により詳細に記載されている範囲に含まれる。
【0015】
本実施形態は、上述の構成要素に加えて、マルチスケール再構成関数を実行するための種々の他のソフトウェアモジュールとハードウェア構成要素とをさらに含む。本実施形態によれば、CT装置のマルチスケールデバイス117は、有利には、所定の細かい3Dグリッドを用いて原画像から所望の関心領域(ROI)を拡大するためのマルチスケール再構成関数を実行する。本実施形態の別の態様によれば、マルチスケールデバイス117の一実施形態では、減少するグリッドサイズまたは減少する撮像視野(FOV)サイズを用いて画像が反復的に再構成される所定数の連続マルチスケーリングステップにより、ROIの所望のズームが達成される。言い換えれば、この実施形態では、逐次近似マルチスケール再構成中にネストされた3Dグリッドの所定のセットを利用する。画像が連続的に拡大されるので、画像の細部は、最終的なズーム画像が所望の細部を維持するように、連続的に小さくなるグリッドサイズで決定される。
【0016】
本実施形態によれば、マルチスケールデバイス117は、1対の粗いグリッドと細かいグリッドのみを用いて出力画像を決定することによって、1つの例示的なマルチスケール再構成を達成する。一例では、粗いグリッドは原(original)撮像視野(FOV)であり、細かいグリッドは所望のズームまたは関心領域(ROI)である。画像は、細かいグリッドサイズを用いて補間画像と詳細画像とを合成することによって再構成され、合成された出力データは、所望の最終的な出力画像として出力される。特定の状況では、以下の反復処理が、所望の最終的な出力画像を再構成するために必要に応じて実行される。
【0017】
本実施形態の別の態様によれば、マルチスケールデバイス117は、出力データを所定数の減少するグリッドサイズと組み合わせて反復的に用いることによって1つの例示的なマルチスケール再構成を達成する。グリッドサイズの各スケールで、画像は、補間画像と詳細画像とを合成することによって再構成され、合成された出力データは、反復処理における補間画像および詳細画像の次のインスタンス(instance)を決定するための基準画像として用いられる。所望の最終的な出力画像は、グリッドサイズの所定のセットの最後のスケールが用いられる、上述の反復処理の終了時に得られる。厳密に言えば、反復は、原画像からの粗いグリッドと細かいグリッドとを用いる次の最初の再構成の後で開始される。
【0018】
本実施形態では、マルチスケールデバイス117は、他のソフトウェアモジュールおよび/または記憶デバイス112、再構成デバイス114、表示デバイス116、および入力デバイス115などのシステム構成要素にデータ/制御バスを介して動作可能に接続される。この点に関して、本実施形態では、マルチスケールデバイス117単独では、必ずしもマルチスケーリング関数および/またはそれに関連するタスクを実行しない。そのうえ、マルチスケールデバイス117は、本実施形態の代替実施形態では、任意選択で再構成デバイス114などの他のデバイスの一部である。
【0019】
次に図2を参照すると、フロー図は、本実施形態におけるマルチスケール再構成処理に関与するステップを示す。特定の状況では、再構成画像の一部分は、任意選択で、所定のサイズにズームされる。この所望の部分は、一般に、関心領域(ROI)である。画像の上述のズーミングを達成するため、最初にステップS100において、スケールがROIのサイズおよび所望のズーム画像のサイズに基づいて選択される。1つの例示的なスケールは、粗いグリッドサイズまたは粗いグリッドボリュームに関連する細かいグリッドサイズまたは細かいグリッドボリュームに基づいて決定される。スケールを決定するにあたって、特定の種類のデータに関してステップS100で考慮する必要がある他の要因がある。
【0020】
本実施形態におけるマルチスケール再構成処理のステップを説明するにあたって、演算は式の形でも表される。これらの式では、上述のスケールは、粗いグリッドおよび細かいグリッドの2つの3Dグリッドxi,kの下付き添え字として用いられるパラメータk=0および1によって表される。パラメータkはグリッドのピッチサイズを決定し、インデックスiは、グリッド上のすべての点にインデックスを付ける。グリッドxi,0は、全撮像視野に対応する第1のピッチサイズを有する粗いグリッドであり、より細かいグリッドxi,1は、所望のズームされた撮像視野に対応する第2のピッチサイズを有する細かいグリッドである。グリッドでは、第2のピッチサイズは第1のピッチサイズより小さいが、2つのグリッドは、同じ数のピクセルを有する。k=0および1における2つのグリッドでは、例示的なマルチスケール再構成処理では、最初に、原計測データ(original measure data)
【数1】
【0021】
から、式(1)で表される所定の再構成法RECON1に従って、粗いグリッドxi,0上で全画像ボリュームf0を再構成する。
【数2】
【0022】
ここで、粗いグリッドサイズまたは粗いグリッドボリュームxi,0は、全撮像視野または原撮像視野に対応する。1つの例示的処理によれば、投影データに対してオーダードサブセット同時代数的再構成法(OS−SART)ステップなどの同時代数的再構成法とTV最小化ステップなどの調整とを実行する全ボリューム逐次近似再構成(TVIR)アルゴリズムなどの再構成法RECON1は反復的である。別の例示的処理によれば、再構成法RECON1は、任意選択で、フィルタ補正逆投影(FBP)法などの所定の解析的再構成処理である。
【0023】
k=0および1における2つのグリッドの一例をさらに用いると、画像ボリュームは、ステップS110において、補間された画像ボリューム
【数3】
【0024】
を得るために、以前に決定された全画像ボリュームf0(xi,0)から細かいグリッドボリュームxi,1上で補間される。以下の式(2.1)では、スケールk=1において、細かいグリッドボリュームxi,1が得られる。
【数4】
【0025】
ここで、INTPLは、3重線形補間(trilinear interpolation)などの所定の補間法である。
【0026】
ステップS120において、式(2.2)に示す投影の新規セット
【数5】
【0027】
を得るために、以前に再構成された全画像ボリュームf0が順投影される。
【数6】
【0028】
FPJは、所定の順投影法である。再投影された全投影データ
【数7】
【0029】
は、いくつかの追加情報を含み、原計測データ
【数8】
【0030】
とは異なる。
【0031】
ステップS130では、以前に再投影された全投影データ
【数9】
【0032】
を、原計測データ
【数10】
【0033】
から減算することで、式(2.3)に示す差分が得られる。
【数11】
【0034】
ある意味では、ステップS130において、ズーム画像のある程度の細部を含むいくつかのデータが分離される。
【数12】
【0035】
ここで、差分
【数13】
【0036】
は、全画像ボリュームのノイズと詳細画像情報の両方を表す。一般に、ノイズは、物理的なピクセルサイズの差によって、および/またはシステムの光学部品によるぼけ(blur)によって生じる。そのうえ、より大きな差分が端部領域で見られる。
【0037】
k=0および1における2つの所定のグリッドの一例をさらに用いると、ステップS140における例示的なマルチスケール再構成処理では、次に、式(2.3)の以前に決定された差分
【数14】
【0038】
から、式(2.4)に表される所定の再構成法RECON2に従って、所望のズームされた撮像視野に対応するより細かいグリッドxi,1上で詳細ボリュームg1を再構成する。
【数15】
【0039】
ここで、所定の再構成法RECON2は、所定の再構成法RECON1とは独立している。1つの例示的処理によれば、投影データに対してオーダードサブセット同時代数的再構成法(OS−SART)ステップなどの同時代数的再構成法とTV最小化ステップなどの調整とを実行する全ボリューム逐次近似再構成(TVIR)アルゴリズムなどの再構成法RECON2は反復的である。別の例示的処理によれば、再構成法RECON2は、任意選択で、フィルタ補正逆投影(FBP)法などの所定の解析的再構成処理である。
【0040】
2つの所定の粗いグリッドおよび細かいグリッドの例において、ステップS150における例示的なマルチスケール再構成処理では、次に、式(2.5)に規定するk=1のスケールで所望のズームされた出力画像f1を得るために、式(2.4)に規定するより細かいグリッドxi,1上の上述の詳細ボリュームg1と、式(2.1)に規定する細かいグリッドボリュームxi,1上の補間された画像ボリューム
【数16】
【0041】
とを合成する。
【数17】
【0042】
言うまでもなく、式(1)から(2.5)に関連する上述のステップは、任意選択で、所定の逐次的な形で、少なくとも部分的に並列に、またはこの両方を組み合わせて実行される。いずれの場合にも、本実施形態による例示的処理は、必ずしも特定の順序のステップ、特定の式、または特定の技法に限定されない。
【0043】
そのうえ、上述の例示のマルチスケール再構成法は、任意選択で、ズーム画像の画質を向上させるために追加のステップを含むように拡張される。本実施形態によるマルチスケール再構成の別の実施形態では、最終の出力画像が生成される前に、詳細画像が、任意選択で、異なるスケールのそれぞれにおいて反復される。
【0044】
1対の粗いグリッドと細かいグリッドとを用いる代わりに、任意選択のステップでは、サイズが異なり、かつ所望のズーム画像のための最終的なグリッドサイズを含むいくつかのネストされた3Dグリッドからなるセットを用いる。たとえば、80ミリメートル(mm)の撮像視野(FOV)を再構成しなければならない場合、本実施形態によれば、一実施形態におけるマルチスケール再構成処理では、320mmの関心領域(ROI)に続いて160mmのROIを再構成してから、最終的に80mmのROIを再構成する。これらのROIの中心はすべて同じ位置にある。したがって、スケールは、いくつかのネストされた3Dグリッドからなるセットxi,kの下付き添え字として用いられるパラメータkによって表される。パラメータkはグリッドのピッチサイズを決定し、インデックスiは、グリッド上のすべての点にインデックスを付ける。グリッドxi,0は、全撮像視野に対応する最も粗いグリッドである。kが増加するにつれて、グリッドは細かくなる。
【0045】
本実施形態におけるマルチスケール再構成処理の任意選択のステップでは、出力画像は、マルチスケール再構成ステップにおいて最終的なズーム画像を得るために反復的に処理される。所定の逐次的な形での320mmのROIの再構成から80mmのFOVを得る上記の例を用いると、ネストされた3Dグリッドxi,kに関して、スケールkは0から2の範囲である。
【0046】
図2に示すフロー図を参照すると、ステップS160では、異なるスケールを用いて追加のステップを実行するべきかどうかを決定する。追加のスケールでステップを実行するべきでないと決定された場合、本実施形態におけるマルチスケール再構成処理では、ステップS180において、式(2.5)で規定されるk=1のスケールで所望のズームされた出力画像f1を出力する。一方、ステップS160において、追加のスケールでさらなるステップを実行するべきであると決定されると、本実施形態によるマルチスケール再構成処理は、パラメータkの値を1だけ増分することによって次に小さいピッチサイズを有するグリッドが選択されるステップS170に進み、さらにステップS110に進む。同時にステップS170において、拡大するために、所定の複数のROIのうちのより小さなROIも選択される。これが、本実施形態によるマルチスケール再構成処理の次のインスタンスを生成するための反復処理の始まりである。
【0047】
スケールk=2では、最初の反復インスタンスにおいて、k=1で得られたgk(xi,k)およびfk(xi,k)の上述の値が用いられる。その後、所定数の反復処理が完了するまで、反復中に、前のインスタンスの値が次のインスタンスで用いられる。k=2におけるステップS110の次のインスタンスでは、画像ボリュームは、ステップS110において、補間された画像ボリューム
【数18】
【0048】
を得るために、以前に決定された全画像ボリュームfk(xi,k)から次に細かいグリッドボリュームxi,k+1上で補間される。以下の式(3.1)では、スケールk=2において、細かいグリッドボリュームxi,k+1が得られる。
【数19】
【0049】
ここで、INTPLは、3重線形補間などの所定の補間法である。
【0050】
ステップS120の次のインスタンスでは、以前に再構成された詳細画像ボリュームgkが、式(3.2)に示す詳細画像ボリュームのための投影の新規セット
【数20】
【0051】
を得るために順投影される。
【数21】
【0052】
FPJは、所定の順投影法である。再投影された投影データ
【数22】
【0053】
は、いくつかの追加情報を含み、以前に決定された差分
【数23】
【0054】
とは異なる。
【0055】
ステップS130の次のインスタンスでは、以前に再投影された全投影データ
【数24】
【0056】
が、以前に決定された差分
【数25】
【0057】
から減算され、式(3.3)に示す差分
【数26】
【0058】
を得る。ある意味では、ステップS130において、ズーム画像のある程度の細部を含むいくつかのデータが分離される。
【数27】
【0059】
ここで、差分
【数28】
【0060】
は、詳細画像ボリュームのノイズと詳細画像情報の両方を表す。一般に、ノイズは、物理的なピクセルサイズの差によって、および/またはシステムの光学部品によるぼけによって生じる。そのうえ、より大きな差分が端部領域で見られる。
【0061】
k=k+1における2つの所定のグリッドの一例をさらに用いると、ステップS140の次のインスタンスにおける例示的なマルチスケール再構成処理では、次に、式(3.4)に表される所定の再構成法RECON2に従って式(3.3)の以前に決定された差分
【数29】
【0062】
から所望のズームされた撮像視野に対応するより細かいグリッドxi,k+1上で詳細ボリュームgk+1を再構成する。
【数30】
【0063】
ここで、所定の再構成法RECON2は、所定の再構成法RECON1とは独立している。1つの例示的処理によれば、投影データに対してオーダードサブセット同時代数的再構成法(OS−SART)ステップなどの同時的代数的再構成法とTV最小化ステップなどの調整とを実行する全ボリューム逐次近似再構成(TVIR)アルゴリズムなどの再構成法RECON2は反復的である。別の例示的処理によれば、再構成法RECON2は、任意選択で、フィルタ補正逆投影(FBP)法などの所定の解析的再構成処理である。
【0064】
任意選択の複数の細かいグリッドの例において、ステップS150の次のインスタンスにおける例示的なマルチスケール再構成処理では、次に、式(3.5)に規定するk=k+1のスケールで所望のズームされた出力画像fk+1を得るために、式(3.4)に規定するより細かいグリッドxi,k+1上の上述の詳細ボリュームgk+1と、式(3.1)に規定する細かいグリッドボリュームxi,k+1上の補間された画像ボリューム
【数31】
【0065】
とを合成する。
【数32】
【0066】
言うまでもなく、上述のステップは、任意選択で、所定の逐次的な形で、少なくとも部分的に並列に、またはこの両方を組み合わせて実行される。いずれの場合にも、本実施形態による例示的処理は、本実施形態を実施するために、反復中でも、特定の順序のステップ、特定の式、または特定の技法に限定されない。
【0067】
ステップS160の次のインスタンスでは、異なるスケールを用いて追加のステップを実行するべきかどうかを再度決定する。追加のスケールでステップを実行するべきでないと決定された場合、本実施形態におけるマルチスケール再構成処理では、ステップS180において、式(3.5)に規定するk=k+1のスケールで所望のズームされた出力画像fk+1を出力する。一方、ステップS160において、追加のスケールでさらなるステップを実行するべきであると決定されると、本実施形態によるマルチスケール再構成処理は、パラメータkの値を1だけ増分することによって次のサイズのグリッドが選択されるステップS170に進み、さらにステップS110に進む。これが、本実施形態によるマルチスケール再構成処理の追加のインスタンスを生成するための反復処理の次のインスタンスの始まりである。
【0068】
次に図3を参照すると、図は、ネストされたROIの所定のセットと、これに対応する、サイズが異なり、かつ所望のズーム画像に対する最終的なグリッドサイズを含む3Dグリッドとを示す。図3(a)は、撮像視野(FOV)であるROI0と、より小さな関心領域ROI1と、最終的な所望のまたは最小の関心領域ROI2とを含む、3つのROIからなる所定のセットを示す。図3(b)は、原グリッドであるG0と、より小さなグリッドG1と、最小のグリッドG2とを含む、3つのネストされたグリッドからなる所定のセットを示す。これらのグリッドG0、G1、およびG2のそれぞれのサイズは同じ数のピクセルを有し、グリッドサイズは、マルチスケール再構成処理を通じて一定に保たれる。たとえば、グリッドサイズは512x512である。したがって、マルチスケール再構成処理を通じてグリッドのインデックスがG0からG1に、G1からG2に増加するにつれて、グリッドの間隔またはピッチが小さくなる。一般に、グリッドの間隔またはピッチは、「ROIサイズ/グリッドサイズ」に規定される。
【0069】
たとえば、40ミリメートル(mm)の撮像視野(FOV)の最終的なROI2を再構成しなければならない場合、一実施形態におけるマルチスケール再構成処理では、原グリッドG0を用いて再構成して160mmの関心領域(ROI)を生成する。次に、マルチスケール再構成処理では、第2のグリッドG1を用いて80mmのROI1を生成してから、第3のグリッドG3を用いて40mmのROIを再構成する。これらのROIおよびグリッドの中心はすべて同じ位置にある。したがって、スケールは、いくつかのネストされた3Dグリッドからなるセットの下付き添え字として用いられるパラメータkによって表される。パラメータkはグリッドのピッチサイズを決定し、インデックスiは、グリッド上のすべての点にインデックスを付ける。上記の例では、グリッドのセットを生成する際、グリッドのサイズは2分の1に減少する。本実施形態は、いかなる特定の減少方式にも限定されない。
【0070】
次に図4(a)および図4(b)を参照すると、本実施形態による一比較例におけるマルチスケール再構成の効果が示されている。図4(a)は、従来技術による技法を用いてズームされた肺の画像を示す。図4(b)は、本実施形態によるマルチスケール反復再構成法を用いてズームされた同じ肺の画像を示す。マルチスケール反復再構成法では、20回の反復にわたるOS−SARTと、500mmから320mmまでの2つのステップからなるマルチスケール再構成とを利用した。
【0071】
次に図5を参照すると、グラフは、肺血管を横切って計測された線プロファイルを示す。x軸は画像のピクセル座標であり、y軸は対応するHU値である。そのうえ、IOLDは、2つのグリッドの手法(IR_00)または従来技術の古いIRを表す。一方、INEWは、2つのステップの手法(IR_01)または本実施形態によるマルチスケール逐次近似再構成法の新規IRを表す。線プロファイルは肺血管を横切って計測され、グラフは、本実施形態によるマルチスケール逐次近似再構成法によって血管の視認性が向上することを示す。
【0072】
すなわち、本実施形態に係るX線コンピュータ断層撮像装置によれば、例えば図6に示す様に、逐次近似再構成処理を行う場合には、撮像によって取得された原データ10を再構成することで、再構成画像11が生成されると共に、再構成画像11をFPJ処理することで再投影データ12が生成される。原データ10と再投影データ12を用いた差分13により、差分データ15が生成され、当該差分データ15を再構成することで、シャープな成分とボケの成分を含む詳細画像16が生成される。一方、再構成画像11上の関心領域を拡大・補完することで、ボケを含む補間画像14が生成される。シャープな成分とボケの成分を含む詳細画像16とボケを含む補間画像14とを用いた加算処理17を実行することで、ボケ成分が相殺されシャープな成分を含む高精細な出力画像18を生成することができる。
【0073】
以上述べた処理を、関心領域のサイズを変更しながら逐次繰り返し実行することで、マルチスケール再構成を実行し、高精細な出力画像を生成することが可能となる。
【0074】
なお、以上述べた本実施形態では、X線コンピュータ断層撮像装置を例として説明した。しかしながら、当該例に拘泥されず、例えばX線コンピュータ断層撮像装置によって取得された原データを用いて、医用画像処理装置(医用ワークステーション)を用いて、本実施形態に係る手法を実現するようにしてもよい。
【0075】
本発明の多数の特徴および利点が本発明の構造および機能の詳細と共に前述の説明に記載されているが、本開示は例示に過ぎないこと、さらに、詳細、特に部品の形状、大きさ、および構成、ならびにソフトウェア、ハードウェア、またはその両方の組み合わせにおける実装形態に関して、変更を加えることができるが、この変更は、添付の特許請求の範囲が表現される用語の広い一般的な意味によって最大限示される本発明の原理内に含まれることを理解されたい。
【特許請求の範囲】
【請求項1】
被検体にX線ビームを曝射するX線曝射ユニットと、
前記被検体を透過したX線ビームを複数の検出素子にて検出する検出ユニットと、
前記検出ユニットの出力に基づく原データを用いて、第1の画像を再構成する再構成ユニットと、
前記第1の画像から第1の再投影データを生成する再投影データ生成ユニットと、
前記原データと前記第1の再投影データとから第1の差分データを生成する差分データ生成ユニットと、
前記第1の画像における関心領域の画像を用いて、前記関心領域に関する第1の補間画像を生成する補間画像生成ユニットと、
前記再構成ユニットにおいて前記第1の差分データを用いた再構成により得られる第1の詳細画像と、前記第1の詳細画像と、を合成することで、第1の出力画像を生成する画像生成ユニットと、
を具備することを特徴とするX線コンピュータ断層撮像装置。
【請求項2】
前記再投影データ生成ユニットは、前記第1の詳細画像から第2の再投影を生成し、
前記差分データ生成ユニットは、前記第1の差分データと前記第2の再投影データとから第2の差分データを生成し、
前記補間画像生成ユニットは、前記第1の出力画像における前記関心領域の画像を用いて、前記関心領域に関する第2の補間画像を生成し、
前記画像生成ユニットは、前記再構成ユニットにおいて前記第2の差分データの少なくとも一部分を用いた再構成により得られる第2の詳細画像と、前記第2の補間画像と、を合成することで、第2の出力画像を生成すること、
を特徴とする請求項1記載のX線コンピュータ断層撮像装置。
【請求項3】
前記再投影データ生成ユニットは、前記第k(ただし、kは2以上の自然数)の詳細画像から第k+1の再投影を生成し、
前記差分データ生成ユニットは、前記第kの差分データと前記第k+1の再投影データとから第k+1の差分データを生成し、
前記補間画像生成ユニットは、前記第kの出力画像における前記関心領域の画像を用いて、前記関心領域に関する第k+1の補間画像を生成し、
前記画像生成ユニットは、前記再構成ユニットにおいて前記第k+1の差分データの少なくとも一部分を用いた再構成により得られる第k+1の詳細画像と、前記第k+1の補間画像と、を合成することで、第k+1の出力画像を生成するものであり、
前記再投影データ生成ユニット、前記差分データ生成ユニット、前記画像生成ユニットは、それぞれk=n(ただし、nは3以上の所望の自然数)まで反復して実行すること、
を特徴とする請求項1記載のX線コンピュータ断層撮像装置。
【請求項4】
前記関心領域のサイズは、前記各反復において所定の割合だけ減少することを特徴とする請求項2又は3に記載のX線コンピュータ断層撮像装置。
【請求項5】
前記再構成ユニットは、解析的再構成法と逐次近似再構成法の組み合わせを用いて、前記第1の画像及び前記第1の詳細画像を再構成することを特徴とする請求項1乃至4のうちいずれか一項記載のX線コンピュータ断層撮像装置。
【請求項6】
前記再構成ユニットは、解析的再構成法又は逐次近似再構成法のいずれかを用いて、第2の詳細画像及び第k+1の詳細画像を再構成することを特徴とする請求項1乃至4のうちいずれか一項記載のX線コンピュータ断層撮像装置。
【請求項7】
X線コンピュータ断層撮像装置を用いて取得された原データを用いて、第1の画像を再構成する再構成ユニットと、
前記第1の画像から第1の再投影データを生成する再投影データ生成ユニットと、
前記原データと前記第1の再投影データとから第1の差分データを生成する差分データ生成ユニットと、
前記第1の画像における関心領域の画像を用いて、前記関心領域に関する第1の補間画像を生成する補間画像生成ユニットと、
前記再構成ユニットにおいて前記第1の差分データを用いた再構成により得られる第1の詳細画像と、前記第1の詳細画像と、を合成することで、第1の出力画像を生成する画像生成ユニットと、
を具備することを特徴とする医用画像処理装置。
【請求項8】
前記再投影データ生成ユニットは、前記第1の詳細画像から第2の再投影を生成し、
前記差分データ生成ユニットは、前記第1の差分データと前記第2の再投影データとから第2の差分データを生成し、
前記補間画像生成ユニットは、前記第1の出力画像における前記関心領域の画像を用いて、前記関心領域に関する第2の補間画像を生成し、
前記画像生成ユニットは、前記再構成ユニットにおいて前記第2の差分データの少なくとも一部分を用いた再構成により得られる第2の詳細画像と、前記第2の補間画像と、を合成することで、第2の出力画像を生成すること、
を特徴とする請求項7記載の医用画像処理装置。
【請求項9】
前記再投影データ生成ユニットは、前記第k(ただし、kは2以上の自然数)の詳細画像から第k+1の再投影を生成し、
前記差分データ生成ユニットは、前記第kの差分データと前記第k+1の再投影データとから第k+1の差分データを生成し、
前記補間画像生成ユニットは、前記第kの出力画像における前記関心領域の画像を用いて、前記関心領域に関する第k+1の補間画像を生成し、
前記画像生成ユニットは、前記再構成ユニットにおいて前記第k+1の差分データの少なくとも一部分を用いた再構成により得られる第k+1の詳細画像と、前記第k+1の補間画像と、を合成することで、第k+1の出力画像を生成するものであり、
前記再投影データ生成ユニット、前記差分データ生成ユニット、前記画像生成ユニットは、それぞれk=n(ただし、nは3以上の所望の自然数)まで反復して実行すること、
を特徴とする請求項7記載の医用画像処理装置。
【請求項10】
前記関心領域のサイズは、前記各反復において所定の割合だけ減少することを特徴とする請求項8又は9に記載の医用画像処理装置。
【請求項11】
前記再構成ユニットは、解析的再構成法と逐次近似再構成法の組み合わせを用いて、前記第1の画像及び前記第1の詳細画像を再構成することを特徴とする請求項7乃至10のうちいずれか一項記載の医用画像処理装置。
【請求項12】
前記再構成ユニットは、解析的再構成法又は逐次近似再構成法のいずれかを用いて、第2の詳細画像及び第k+1の詳細画像を再構成することを特徴とする請求項7乃至10のうちいずれか一項記載の医用画像処理装置。
【請求項13】
X線コンピュータ断層撮像装置を用いて取得された原データを用いて、第1の画像を再構成し、
前記第1の画像から第1の再投影データを生成し、
前記原データと前記第1の再投影データとから第1の差分データを生成し、
前記第1の画像における関心領域の画像を用いて、前記関心領域に関する第1の補間画像を生成し、
前記第1の差分データを用いた再構成により得られる第1の詳細画像と、前記第1の詳細画像と、を合成することで、第1の出力画像を生成すること、
を具備することを特徴とする医用画像処理方法。
【請求項1】
被検体にX線ビームを曝射するX線曝射ユニットと、
前記被検体を透過したX線ビームを複数の検出素子にて検出する検出ユニットと、
前記検出ユニットの出力に基づく原データを用いて、第1の画像を再構成する再構成ユニットと、
前記第1の画像から第1の再投影データを生成する再投影データ生成ユニットと、
前記原データと前記第1の再投影データとから第1の差分データを生成する差分データ生成ユニットと、
前記第1の画像における関心領域の画像を用いて、前記関心領域に関する第1の補間画像を生成する補間画像生成ユニットと、
前記再構成ユニットにおいて前記第1の差分データを用いた再構成により得られる第1の詳細画像と、前記第1の詳細画像と、を合成することで、第1の出力画像を生成する画像生成ユニットと、
を具備することを特徴とするX線コンピュータ断層撮像装置。
【請求項2】
前記再投影データ生成ユニットは、前記第1の詳細画像から第2の再投影を生成し、
前記差分データ生成ユニットは、前記第1の差分データと前記第2の再投影データとから第2の差分データを生成し、
前記補間画像生成ユニットは、前記第1の出力画像における前記関心領域の画像を用いて、前記関心領域に関する第2の補間画像を生成し、
前記画像生成ユニットは、前記再構成ユニットにおいて前記第2の差分データの少なくとも一部分を用いた再構成により得られる第2の詳細画像と、前記第2の補間画像と、を合成することで、第2の出力画像を生成すること、
を特徴とする請求項1記載のX線コンピュータ断層撮像装置。
【請求項3】
前記再投影データ生成ユニットは、前記第k(ただし、kは2以上の自然数)の詳細画像から第k+1の再投影を生成し、
前記差分データ生成ユニットは、前記第kの差分データと前記第k+1の再投影データとから第k+1の差分データを生成し、
前記補間画像生成ユニットは、前記第kの出力画像における前記関心領域の画像を用いて、前記関心領域に関する第k+1の補間画像を生成し、
前記画像生成ユニットは、前記再構成ユニットにおいて前記第k+1の差分データの少なくとも一部分を用いた再構成により得られる第k+1の詳細画像と、前記第k+1の補間画像と、を合成することで、第k+1の出力画像を生成するものであり、
前記再投影データ生成ユニット、前記差分データ生成ユニット、前記画像生成ユニットは、それぞれk=n(ただし、nは3以上の所望の自然数)まで反復して実行すること、
を特徴とする請求項1記載のX線コンピュータ断層撮像装置。
【請求項4】
前記関心領域のサイズは、前記各反復において所定の割合だけ減少することを特徴とする請求項2又は3に記載のX線コンピュータ断層撮像装置。
【請求項5】
前記再構成ユニットは、解析的再構成法と逐次近似再構成法の組み合わせを用いて、前記第1の画像及び前記第1の詳細画像を再構成することを特徴とする請求項1乃至4のうちいずれか一項記載のX線コンピュータ断層撮像装置。
【請求項6】
前記再構成ユニットは、解析的再構成法又は逐次近似再構成法のいずれかを用いて、第2の詳細画像及び第k+1の詳細画像を再構成することを特徴とする請求項1乃至4のうちいずれか一項記載のX線コンピュータ断層撮像装置。
【請求項7】
X線コンピュータ断層撮像装置を用いて取得された原データを用いて、第1の画像を再構成する再構成ユニットと、
前記第1の画像から第1の再投影データを生成する再投影データ生成ユニットと、
前記原データと前記第1の再投影データとから第1の差分データを生成する差分データ生成ユニットと、
前記第1の画像における関心領域の画像を用いて、前記関心領域に関する第1の補間画像を生成する補間画像生成ユニットと、
前記再構成ユニットにおいて前記第1の差分データを用いた再構成により得られる第1の詳細画像と、前記第1の詳細画像と、を合成することで、第1の出力画像を生成する画像生成ユニットと、
を具備することを特徴とする医用画像処理装置。
【請求項8】
前記再投影データ生成ユニットは、前記第1の詳細画像から第2の再投影を生成し、
前記差分データ生成ユニットは、前記第1の差分データと前記第2の再投影データとから第2の差分データを生成し、
前記補間画像生成ユニットは、前記第1の出力画像における前記関心領域の画像を用いて、前記関心領域に関する第2の補間画像を生成し、
前記画像生成ユニットは、前記再構成ユニットにおいて前記第2の差分データの少なくとも一部分を用いた再構成により得られる第2の詳細画像と、前記第2の補間画像と、を合成することで、第2の出力画像を生成すること、
を特徴とする請求項7記載の医用画像処理装置。
【請求項9】
前記再投影データ生成ユニットは、前記第k(ただし、kは2以上の自然数)の詳細画像から第k+1の再投影を生成し、
前記差分データ生成ユニットは、前記第kの差分データと前記第k+1の再投影データとから第k+1の差分データを生成し、
前記補間画像生成ユニットは、前記第kの出力画像における前記関心領域の画像を用いて、前記関心領域に関する第k+1の補間画像を生成し、
前記画像生成ユニットは、前記再構成ユニットにおいて前記第k+1の差分データの少なくとも一部分を用いた再構成により得られる第k+1の詳細画像と、前記第k+1の補間画像と、を合成することで、第k+1の出力画像を生成するものであり、
前記再投影データ生成ユニット、前記差分データ生成ユニット、前記画像生成ユニットは、それぞれk=n(ただし、nは3以上の所望の自然数)まで反復して実行すること、
を特徴とする請求項7記載の医用画像処理装置。
【請求項10】
前記関心領域のサイズは、前記各反復において所定の割合だけ減少することを特徴とする請求項8又は9に記載の医用画像処理装置。
【請求項11】
前記再構成ユニットは、解析的再構成法と逐次近似再構成法の組み合わせを用いて、前記第1の画像及び前記第1の詳細画像を再構成することを特徴とする請求項7乃至10のうちいずれか一項記載の医用画像処理装置。
【請求項12】
前記再構成ユニットは、解析的再構成法又は逐次近似再構成法のいずれかを用いて、第2の詳細画像及び第k+1の詳細画像を再構成することを特徴とする請求項7乃至10のうちいずれか一項記載の医用画像処理装置。
【請求項13】
X線コンピュータ断層撮像装置を用いて取得された原データを用いて、第1の画像を再構成し、
前記第1の画像から第1の再投影データを生成し、
前記原データと前記第1の再投影データとから第1の差分データを生成し、
前記第1の画像における関心領域の画像を用いて、前記関心領域に関する第1の補間画像を生成し、
前記第1の差分データを用いた再構成により得られる第1の詳細画像と、前記第1の詳細画像と、を合成することで、第1の出力画像を生成すること、
を具備することを特徴とする医用画像処理方法。
【図1】


【図2】

【図3】

【図4】
【図5】

【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−85955(P2013−85955A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2012−227872(P2012−227872)
【出願日】平成24年10月15日(2012.10.15)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成24年10月15日(2012.10.15)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]