
セイコーエプソン株式会社により出願された特許
4,021 - 4,030 / 51,324
電気光学装置および投射型表示装置
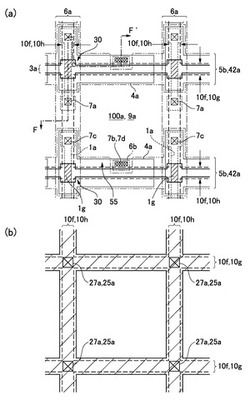
【課題】対向基板側の構造を変更することにより、横ストロークの発生を防止することのできる電気光学装置、および当該電気光学装置を備えた投射型表示装置を提供すること。
【解決手段】液晶装置100において、対向基板20には、共通電極21より下層側に導電性の遮光層29が設けられ、かかる遮光層29は絶縁層27のコンタクトホール27a、27b、第1導通部25aおよび第2導通部25bにおいて共通電極21と導通している。このため、共通電極21のシート抵抗を低減したのと実質的に同様な効果を得ることができる。従って、共通電極21の電位が画像信号の電位変化に伴って変動しても、共通電極21の電位は、短い時間で共通電位に復帰するので、横ストロークの発生を防止することができる。また、遮光層29の上層には絶縁層27が形成されているため、遮光層29に起因する段差が緩和されている。従って、共通電極21に段差切れが発生しない。
(もっと読む)
累進屈折力レンズの設計方法

【課題】十分な加入度を得ることができる累進屈折力レンズの設計方法を提供すること。
【解決手段】内面に累進領域が形成された内面ISと球面状の外面OSとを有する累進屈折力レンズ1を設計するにあたり、外面OSの近用領域における主子午線を通り眼球Eの回施中心Cを通る光線であってフィッティングポイントFPから最も離れた点を通る光線Lを光線追跡法により求め、光線Lが内面を通る点よりもフィッティングポイントFPに近い点であって内面ISにおける主子午線の上の点に近用測定ポイントを設定し、累進領域に設けられる累進帯長を選択することにした。
(もっと読む)
累進屈折力レンズおよびその設計方法
【課題】レンズを通して見える像のゆれが少ない累進屈折力レンズを提供する。
【解決手段】眼球側の面が、度数の異なる遠用部および近用部と、遠用部および近用部を接続する中間部とを含み、物体側の面19Aが、主子午線Yに沿った第1の領域31であって、第1の曲率r1を有する球面状の第1の領域31と、遠用部に対応する第2の領域32であって、第1の曲率r1と等しい第2の曲率r2を有する球面状の第2の領域32と、第1の領域31の外側および第2の領域32の下側の第3の領域33であって、第1の曲率r1より小さい第3の曲率r3を有する第3の領域33とを含む累進屈折力レンズ10aを提供する。
(もっと読む)
眼鏡フレームの選択方法
【課題】十分な加入度を有する累進屈折力レンズを取り付けることのできる眼鏡フレームの選択方法を提供すること。
【解決手段】累進領域が形成された内面ISと球面状の外面OSとを有する累進屈折力レンズ1をフレーム天地幅の寸法が異なる複数の眼鏡フレームから選択するにあたり、装用者の処方に基づいて設定された累進帯長を前提とし、この累進帯長の累進終了点との関係で、近用測定ポイントを設定し、この近用測定ポイントを前提として、適切なフレーム高さの眼鏡フレームを選択する。
(もっと読む)
光モジュールおよび光分析装置
【課題】外部から干渉フィルターへ伝達される振動を低減することができ、分光精度の高い光モジュールを提供すること。
【解決手段】本発明の光モジュール(測色センサー)は、可動反射膜57を備える可動基板52、および可動反射膜57にギャップを介して対向する固定反射膜56を備え、可動基板52に接合される固定基板51、を備える干渉フィルター5と、干渉フィルター5を保持する筐体6と、を備える。可動基板52は、固定基板51の外周縁よりも外側に突出する突出部524を備える。この突出部524は、突出先端側に設けられ、筐体6に固定される固定部525を備える。可動基板52と筐体6によって閉じられている密閉空間58は筐体6にある充填孔61を介して充填物質59を密閉空間58に充填することが出来る。
(もっと読む)
会議システム、会議システムの制御方法、及びプログラム
【課題】会議参加者同士の視線を容易に一致させることが可能な会議システム、会議システムの制御方法、及びプログラムを提供する。
【解決手段】撮像装置3は、プロジェクター1の投写範囲内であるスクリーン2の略中央に位置しているため、会議参加者Mを正面から撮像することが可能であり、会議参加者M同士の視線を一致させることができる。ただし、このような構成では、撮像装置3がプロジェクター1から投写される光を受光してしまうため、撮像画像内に極端に明るい(輝度が高い)部位が含まれ、撮像画像の視認性が低下してしまう。このため、本実施形態では、撮像装置3が撮像した画像に対して、輝度が所定の閾値よりも高い部位の輝度を低下させる処理を施すようになっている。
(もっと読む)
カメラおよびその撮影実行方法
【課題】ユーザーによる撮影指示の動作によりカメラ自体が動くのを抑制する。
【解決手段】ユーザーの頬の奥の筋電位を筋電位計測回路の測定電極92,94を用いて計測し、ユーザーの歯を噛む動作によって筋電位計測回路からの筋電位信号Eoの変化量が判定用閾値Erefを以上になったときに露光処理や画像処理などの撮影のための処理を実行する。これにより、ユーザーがシャッターボタンを指で押下することなく、顔の一部位の筋電位を変化させる動作によって撮影を実行することができる。この結果、撮影された被写体像のブレを抑制することができる。
(もっと読む)
累進屈折力レンズ
【課題】歪みを低減することができる累進屈折力レンズを提供すること。
【解決手段】累進屈折力レンズ10は、物体側屈折面11の主子午線A上の遠用部測定基準点DPでの横方向の曲率CY(DP)と、遠用部測定基準点DPでの前記縦方向の曲率CT(DP)とが以下の式(1)の関係を満たすとともに、
[数1]
CY(DP)=CT(DP)・・・(1)
主子午線A上のうち累進開始点Sより近用部2側の累進部3および近用部2に位置する点Pにおける横方向の曲率CY(P)と、当該点Pにおける縦方向の曲率CT(P)とが以下の式(2)の関係を満たすことを特徴とする。
[数2]
CY(P)>CT(P)・・・(2)
(もっと読む)
累進屈折力レンズ
【課題】歪みを低減することができる累進屈折力レンズを提供すること。
【解決手段】累進屈折力レンズ10は、物体側屈折面11の主子午線A上の遠用部測定基準点DPでの横方向の曲率CY(DP)と、遠用部測定基準点DPでの前記縦方向の曲率CT(DP)とが以下の式(1)の関係を満たすとともに、
[数1]
CY(DP)=CT(DP)・・・(1)
主子午線A上のうち累進開始点Sより近用部2側の累進部3および近用部2に位置する点Pにおける横方向の曲率CY(P)と、当該点Pにおける縦方向の曲率CT(P)とが以下の式(2)の関係を満たすことを特徴とする。
[数2]
CY(P)<CT(P)・・・(2)
(もっと読む)
ロボット駆動方法及びロボット
【課題】回生エネルギーの発生自体を抑制しつつ、外力やロボットの状態変化に対して強い動作を行なわせることができる駆動方法を提供する。
【解決手段】目標位置に向かって可動部を移動させる際に、駆動力を動力発生部に発生させることにより、可動部を目標位置に向けて加速を行なわせる加速工程のステップS104と、一定速にするよりも動力発生部における発生力の小さい制御を行なう予備減速工程のステップS105と、目標位置に向かう方向とは逆方向の駆動力を発生させて可動部を減速させ目標位置に停止させる減速停止工程のステップS106を行なわせる。この際に予備減速工程のステップS105の一部において予備減速推移演算工程S102で演算した指令速度を基にした速度制御を行なう。
(もっと読む)
4,021 - 4,030 / 51,324
[ Back to top ]