
JUKI株式会社により出願された特許
131 - 140 / 1,557
電子部品実装装置
【課題】電子部品をより確実に吸着ノズルに吸着させる。
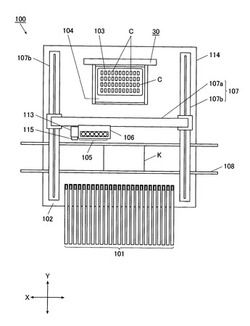
【解決手段】電子部品Cの実装が行われる基板Kを保持する基板保持部と、実装される複数の電子部品を供給する部品供給部104と、基板に搭載する電子部品を吸着する吸着ノズル105を備えたヘッド106と、部品供給部及び基板保持部を含む領域にかけてヘッドを任意に移動位置決めするヘッド移動機構107と、基板に対する実装動作制御を実行する動作制御手段10とを備える電子部品実装装置100において、吸着ノズル又は部品供給部の電子部品のいずれか一方に対して連続的な往復動作を付与する往復動作付与手段30を備えている。
(もっと読む)
電子部品実装装置

【課題】ヘッドに対する長いエアチューブの接続を不要とする。
【解決手段】電子部品の実装が行われる基板を保持する基板保持部と、実装される電子部品を供給する部品供給部と、基板に搭載する電子部品を吸着する昇降可能な吸着ノズル105を備えたヘッドと、基板保持部と部品供給部との間のヘッドの移動を行う移動機構とを備える電子部品実装装置において、可撓性を有する膜又は薄板からなる可撓部と、可撓部に貼設された圧電素子と、可撓部と共に空気室Aを構成する構造体とを有する吸排気装置をヘッドに搭載し、当該吸排気装置を吸着ノズル105による吸着を行うための負圧発生源とする構成を採っている。
(もっと読む)
ミシン
【課題】ルーパ糸の巻き付きをより好適に防止する。
【解決手段】ミシンモータの回転によって回転する下軸2と、下軸の回転に連動して往復動作を行うルーパ33と、二つの糸通し部11,12と、二つの糸通し部の間に配置され、二つの糸通し部を渡るルーパ糸Lがその外周部に摺接するよう下軸に設けられた外周カムである糸制御カム13,14とを備え、ルーパ糸に糸制御カムの径の変化によって張力を付与するミシンにおいて、糸制御カムからルーパに至る経路の途中にルーパ糸を挿通させる糸案内34を設け、糸案内に、当該糸案内に挿通されたルーパ糸の周囲を取り囲む配置で糸捕捉を行う糸捕捉部材20を設けた。
(もっと読む)
回転軸受付き直動軸受
【課題】小型化が容易で、軸体の高精度での滑動及び/又は回転を安定に実現することができ、そして簡易な操作で調心可能な回転軸受付き直動軸受を提供すること。
【解決手段】筒体(11)の内部に軸体(12)を非回転にて滑動可能に収容してなる直動軸受(13)、および筒体の周囲に装着された回転軸受(14)からなり、上記の回転軸受が、筒体の外周面に筒体の長さ方向に沿って互いに間隔をあけて形成された二以上の周溝(11a)と、各周溝に配置された複数の転動体(15)と、それぞれ各周溝の各転動体の一部を外周側に突き出させた状態で回転可能に保持している二以上の環状転動体保持器(16)と、それぞれ各保持器から突き出された各転動体部分を収容している二以上の周溝(17a)を内周面に備える外筒(17)と、外筒の周囲に備えられている、ボルトを挿入可能な複数の透孔(18a)を持つフランジ(18)とから構成されている回転軸受付き直動軸受。
(もっと読む)
部品実装装置
【課題】搭載ヘッドにノズルヘッドを高密度搭載することを可能とするリニアモータを備えた部品実装装置を提供する。
【解決手段】任意のノズルヘッドに装着されている吸着ノズルで吸着保持した電子部品を、該ノズルヘッドを待機位置から下降させて、位置決めされている基板上に実装する部品実装装置において、リニアモータ26が、搭載ヘッドに固定された固定子22と、該固定子に沿って上下動する、幅方向に並列に搭載される複数のノズルヘッド20L、20Rがそれぞれ取付可能な、上下に配設された複数の可動子24L、24Rとを備えていると共に、前記各可動子は、幅がそれぞれ取付けられるノズルヘッドの幅より広く形成され、且つ、待機位置にある隣接する可動子が、電子部品実装時の最大下降距離以上、上下に離間されている。
(もっと読む)
電子部品搭載ヘッド
【課題】吸着ノズルの長ストローク移動と高精度荷重搭載制御を実現する。
【解決手段】Z軸28による可動部30と、これに軸回転と上下動が可能に支持されたノズル軸20と、これを可動部に対して下方に押圧する加圧軸48と、これによる押圧時にノズル軸に掛かる荷重を検出する荷重センサ50とを備えた搭載ヘッドにおいて、可動部に対してノズル軸の軸回転と上下動を可能とする、複数のスプラインシャフト36A、40Aが配設され、検出軸50Aがノズル軸にオフセットされて加圧軸に連続形成され、ノズル軸に軸受52を介して連結された、荷重アーム54に荷重センサが係合され、加圧軸により押し下げられる荷重センサを介して該荷重アームが押し下げられ、ノズル軸が下方へ押圧される。
(もっと読む)
表面実装装置
【課題】基板に搭載した各部品の搭載状態を、高さを含めて短時間で検査する。
【解決手段】搬入された基板Saを待機させるインバッファ12と、該インバッファから搬送される基板を位置決めし、該基板に部品を搭載させるセンタバッファ10と、該センタバッファで部品が搭載された搭載済み基板Sbを、搬出されるまで待機させるアウトバッファ14とからなる基板搬送部2を備えていると共に、前記インバッファ及びアウトバッファに、搬送される基板の形状を測定する3次元測定器20A、20Bがそれぞれ配設されている。
(もっと読む)
メダル投出装置
【課題】メダルを回収箱に円滑に且つ確実に流下させ、排出させることができるオーバーフローシュートを備えたメダル投出装置を提供する。
【解決手段】壁部に囲まれた貯留空間に貯留されたメダルを、下方に配設されたベースプレート上に回転可能に支持された回転ディスクに供給する受け皿と、該貯留空間に基準以上に貯留されたメダルを、該貯留空間の壁部に形成された排出口に誘導し、外部へ排出する傾斜底部を有するオーバーフローシュート40とを備えたメダル投出装置において、前記オーバーフローシュートが有する傾斜底部の側端には、前記排出口に近接する下流側に上方に延びたメダル押え壁42と、該メダル押え壁より上流側に上流端部まで連続した円弧形状の誘い込み部44とが形成されている。
(もっと読む)
位置決め装置の同期防振制御装置
【課題】モータ軸と負荷間をボールねじやタイミングベルト等の負荷位置によりバネ定数が大きく変化する機構で接続した位置決め装置に負荷側外乱オブザーバを適用した場合においても、バネ定数の変化の影響を受けない精度の高い負荷側外乱の推定を可能とし、外乱に対する高いロバスト性を持たせて、振動抑制と同期制御を実現可能する。
【解決手段】モータ軸と負荷間を弾性体で接続した、負荷位置によりバネ定数Kfが大きく変化する位置決め装置において、負荷側の軸ねじれ角を測定し、軸ねじれ角と負荷の加速度に基づいて構成した負荷側外乱オブザーバ40にて推定した負荷側の外乱を、負荷側外乱から位置指令値までの逆システム50を通してフィードバックする際に、負荷側外乱オブザーバ内のバネ定数ノミナル値Kfnを負荷位置により変える。
(もっと読む)
電子部品実装装置
【課題】電子部品供給装置の装着不良時の給電問題を解消する。
【解決手段】取付部30と電子部品供給装置20との間で、互いに対向するコイル41,61と、互いに対向する射出部43a,63aと入射部44a,64aと、互いに対向する確認用信号の射出部45a,65b及び入射部46a、65aとを備え、入射部65aから射出部65bまでの確認用信号の伝搬を行う光導波路65とを有し、取付部から発した確認用信号列を当該取付部で確認用信号列を検出した場合に、コイル41による電子部品供給装置に対する電源供給を開始する制御手段81とを備えている。
(もっと読む)
131 - 140 / 1,557
[ Back to top ]