
ファナック株式会社により出願された特許
971 - 980 / 1,110
ロボット撮像装置
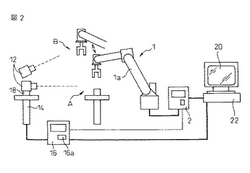
【課題】 ロボットの作業状況を監視するためのロボット撮像装置であって、ロボットの作業状況を過不足なく撮像して画像集約作業を軽減するとともに全体としてコストダウンが図られたロボット撮像装置を提供する。
【解決手段】 ロボット撮像装置10は、ロボット1の作業状況を監視するためのカメラ12と、カメラ12を可動に支持するカメラ位置決め機構14と、カメラ位置決め機構14を制御するカメラ位置決め機構制御装置16とを有する。カメラ位置決め機構制御装置16は、ロボット制御装置2からの指令に基づいてカメラ位置決め機構14を制御することにより、カメラ12の撮像領域を作業領域Aから作業領域B(又はその逆)に変更することができる。
(もっと読む)
レーザ発振器及びレーザ発振器の励起光源の寿命推定方法

【課題】簡便な構成により、励起光源の寿命推定可能なレーザ発振器を提供する。
【解決手段】励起光源10と、励起光源10に電流を供給する電源30と、励起光源10から照射された励起光によってレーザ光を出力するレーザ結晶20と、レーザ結晶20により生じたレーザ光を受光し、そのレーザ光の強度に対応した信号を出力するパワーセンサ40と、レーザ発振器の稼動時間を保存するメモリ60と、パワーセンサ40が出力した信号が予め定められた条件を満たす場合に電源30が励起光源10に供給している電流値と、メモリ60に保存された稼動時間とを用いて、励起光源10の寿命を推定するプロセッサ50とを有するレーザ発振器(100、200、300)を構成する。
(もっと読む)
エアバランス装置
【課題】 垂直軸上で駆動される可動部の重量負荷を補償するバランス力の制御の応答性改善。
【解決手段】 固定部40と、軸部45を持つ垂直軸上で移動する可動部50を含むエアバランス機構部にエアバランス室44を設け、圧力調整装置60、流路42等を通して定圧の圧縮エアを供給し、流路46、流量制御装置70等を通してエア排気を行う。流量制御装置70による排気量増減制御に即応してエアバランス室44の内圧が変化する。流量制御装置70に対する制御入力には、垂直軸駆動モータへの供給電流値が採用できる。また、排気系を2系統に分け、一方の排気系統で一定流量の排気を行いつつ、他方の排気系統を通して排気される流量の制御を行うこともできる。
(もっと読む)
数値制御装置
【課題】 学習制御による位置偏差が収束するまでの加工によるワークの無駄を無くし、補正データの記憶、及び実加工を自動的に行うことができるようにする。
【解決手段】 学習制御開始指令により、工具とワークが干渉しない位置に移動させる(a10)。学習制御開始指令から学習制御終了指令までの学習制御区間、入力オン、出力オンとして(a18)、位置偏差を入力し補正データを作成すると共に補正データを出力するのに学習制御を行う。この空運転による学習制御を伴った学習制御区間の処理を、設定回数まで繰り返し実行する(a12〜a15)。自動的に、得られた補正データを数値制御装置内に記憶し(a13)、工具とワークが干渉する位置に移動させて(a14)、該補正データで位置偏差を補正して実加工を行う(a19)。ワークを無駄にすることがなく、自動的に補正データを記憶し、該補正データを用いて実加工を行うものであるから、サイクルタイムを短縮できる。
(もっと読む)
ダイクッション制御装置
【課題】 サーボモータによって位置制御と圧力制御を切換て、ダイクッション制御を行い、位置制御にプレス軸とダイクッション軸の衝突時の衝撃を緩和する。
【解決手段】 サーボモータMdによってダイクッション部材を制御する。切換スイッチ16をa側に接続し数値制御部10からの指令によりサーボモータMdの位置(速度)を制御し、ダイクッション部材の位置を制御する。この位置制御中は、トルクリミット手段15によりサーボモータMdの出力トルクを制限する。位置制御中、誤設定や誤操作等によって、プレス軸がダイクッション部材に衝突しても、サーボモータMdは制限されたトルク以下しか出力しないから、衝撃力が緩和され、ダイクッション部材やプレス軸の破損を防止できる。なお、プレス作業時には、位置検出器7でプレス軸が所定位置に下降したことが検出されると、切換スイッチ16をb側に接続し、圧力制御することになる。
(もっと読む)
数値制御装置
【課題】 学習制御実行区間に、動作パターンが変更されるような指令や信号入力がないかチェックできる数値制御装置を提供する。
【解決手段】 数値制御装置は、加工プログラムを順次読み込み(S1)、学習制御開始指令が読み込まれ、学習制御終了指令が読み込まれるまでフラグFを「1」にセットする(S2,S9,S3,S10)。このフラグFが「1」にセットされている学習制御区間において、動作パターンを変更するような学習中に不適切な指令や信号入力がないか判断する(S5,S6)。このような指令や信号入力があると、アラーム停止またはフィードホールド停止し、停止の原因を表示し、学習制御を無効にする(S11〜S13)。学習中に不適切な指令や信号入力があると、停止し原因が表示されるから、加工プログラムの修正作業が容易となる。これにより学習制御に起因する誤切削等を防止することができる。
(もっと読む)
モータ、及びモータ製造装置
【課題】 ステータのティースによるコギングトルクを低減すること。
【解決手段】 積層するコア間において、各コアに発生するコギングトルクの位相の位相差が180度となるように、各コアの圧延方向の角度を設定することによって、これらのコアに発生するコギングトルクを互いに相殺して打ち消し、モータのコギングトルクを低減する。電磁鋼板の圧延材からなる複数のコアを積層して形成される積層コアを備えるモータであって、積層コアを形成する各コアは、コアの圧延方向がスロット数及び/又は極数により定まる機械角だけ異ならせる。機械角は、モータのスロット数及び/又は極数により定まる各コアの磁気異方性とティース形状により発生するコギングトルクの位相差が互いに180度となる角度である。
(もっと読む)
異常検出機能を有するファン
【課題】 回転数低下だけでなく回転部の破損や脱落等の異常も検出可能であるとともに、使用条件が特には限定されない異常検出機能を備えたファンを提供する。
【解決手段】 ファン10は、静止部12と、静止部12に回転可能に取付けられる回転部14と、回転部14に設けられる第1の電気回路16と、静止部12に設けられるとともに第1の電気回路16と電磁気的に結合される第2の電気回路18と、第2の電気回路18に電気的に接続され、回転部14の異常を検出する異常検出回路20とを有する。
(もっと読む)
数値制御装置
【課題】 工作機械の盤内の諸要素のアラーム情報等を容易に集中管理できる数値制御装置。
【解決手段】 工作機械の制御盤1内の強電盤10内には、故障検出アラーム信号を出力するリレー1、低電圧アラーム信号を出力するバッテリ1、回転停止又は回転数低下アラーム信号と回転数を示すステータス信号を出力するファンモータ1、周囲温度の計測結果を表わすステータス信号を出力する温度計1等が実装される。各要素に無線タグが装備され、アラーム信号/ステータス信号を一旦記憶し、無線信号で発信する。受信デバイスで受信された無線信号は数値制御装置1内に取り込まれ、アラーム発生時にはアラーム発生要因(箇所)の情報が表示され、ブザー(またはスピーカ)4が鳴らされる。ステータス情報は、定常的に表示される。
(もっと読む)
工具損傷異常検出装置
【課題】 工具に加わる負荷を表わす指標について現在値と近過去平均値との比較値の許容範囲の設定を簡便、適切に行うこと。
【解決手段】 加工サイクル計数指標i=0とし、加工を実行しながら負荷を所定周期で検出し、指標H(i)(負荷値の面積S、負荷下降時の2点間最大傾斜絶対値G-等)をnサイクル分作成する(S1〜5)。以後、各指標とともに近過去nサイクル分の各指標と現在サイクルの指標値の比較値を作成する。第1回の比較値は、しきい値の初期値設定に利用できる(S6〜10)。いずれかの比較値が許容範囲から逸脱したら許容範囲を拡張する方向にしきい値を更新し、更新履歴を保存する(S11〜12)。損傷異常の目視等により、しきい値更新停止指令を入力し、加工をそのサイクル完了後に停止し、最新のしきい値の更新値を集めて設定しきい値とする(S13〜15)。
(もっと読む)
971 - 980 / 1,110
[ Back to top ]